Изобретение относится к способам и устройствам для управления летательными аппаратами и направлено на обеспечение безопасности при эксплуатации беспилотных летательных аппаратов на кораблях.
Известны беспилотные летательные аппараты (БПЛА), например, БПЛА «Форпост», которые взлетают и садятся по-самолетному, то есть с разбегом и пробегом [см. Популярная механика, №10 (156), октябрь 2015 г., с. 100-104, www.popmech.ru]. Использование их в качестве БПЛА корабельного базирования практически невозможно на малых кораблях, не имеющих обширную свободную палубу. Данный недостаток частично устранен в БПЛА малых форм, например БПЛА «Гранат-4», которые запускаются с металлических направляющих (катапульты) с помощью резинового жгута, а приземляются по командам автоматической системы управления на парашюте [см. вышеуказанный источник]. В качестве БПЛА корабельного базирования они могли бы применяться на больших кораблях, имеющих вертолетную взлетно-посадочную площадку, размеры которых позволяют разместить на них катапульту. Подобрать с воды приводнившийся БПЛА мог бы вертолет. На небольших кораблях, не имеющих открытых, свободных от надстроек и вооружения палуб, а также подверженных бортовой и килевой качке при небольшом волнении моря, БПЛА с такими взлетно-посадочными устройствами использовать практически невозможно. Также препятствованием для их использования является сложность обнаружения и подъема БПЛА на борт корабля.
Недостатки, связанные с обнаружением места посадки БПЛА могут быть частично устранены в случае реализации технического решения [см. Патент RU 2307047 «Способ посадки сверхлегкого беспилотного летательного аппарата», МПК: В64С 29]. При ударе об воду включается радиомаячок, и БПЛА ищут по способу «охоты на лис», применяемому в спортивном ориентировании. Однако при этом не устраняются недостатки, связанные с подъемом БПЛА на борт корабля.
Недостатки, связанные со сложностью посадки БПЛА на корабли частично устранены в техническом решении [см. Патент РФ 2523613 «Способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система», МПК: G08G 5/00], В этом способе определяют барометрическую высоту в месте посадочной площадки и передают ее на БПЛА. В результате программа автоматической посадки БПЛА может быть скорректирована в части выбора оптимальной глиссады. Однако это не устраняет недостатки, связанные с посадкой БПЛА на качающуюся палубу, а в случае приводнения БПЛА на парашюте, связанные с обнаружением БПЛА и подъемом его на борт корабля.
Известны технические решения посадки БПЛА, на основе уравнивания горизонтальной посадочной скорости БПЛА и скорости посадочной площадки [см. Японский патент №2001354199, B64F 1/00, В63В 35/50, В64С 13/18]. В данном решении роль посадочной площадки выполняет, например, палуба корабля, баржи]. Но для реализации такого способа посадки на борту БПЛА и платформы (корабля) должны быть установлены специальные посадочные средства (оптические или электронные), позволяющие оператору решать задачу привода БПЛА на корабль и регулировать скорость корабля. Недостатки, связанные несвободной для посадки средних и тяжелых БПЛА палубы малых кораблей, данное решение не устраняет.
Наиболее близким техническим решением, частично устраняющим недостатки решений-аналогов, является взлетно-посадочное устройство и способ посадки БПЛА вертикального взлета и посадки [см. Патент РФ 2133210 «Беспилотный летательный аппарат», МПК: В64С 27/20] - прототип.
В данном техническом решении после достижения БПЛА заданной неподготовленной посадочной площадки в пункте наблюдения активизируется программа посадочного снижения с обзором посадочной площадки через вращающийся винт с целью передачи данных для оценки возможности приземления в данном пункте наблюдения. Такой БПЛА в режиме ручного управления может быть выведен на посадочную площадку, роль которой может играть свободное место на палубе корабля.
Однако такой способ посадки применим только для БПЛА вертикального взлета и посадки микро и малого классов, встреча которых на малой посадочной скорости не приводит при встрече с качающейся палубой корабля к механическому повреждению БПЛА. Он не обеспечивает посадку на борт корабля более тяжелых БПЛА, несущих на себе разного рода полезную нагрузку, а также БПЛА, выполненных по «самолетной» схеме.
Задачей заявленного изобретения является устранение отмеченных недостатков, а именно, обеспечение взлета и посадки БПЛА как вертикального взлета и посадки, так и выполненного по самолетной схеме в условиях эксплуатации его на кораблях, не имеющих свободную палубу.
Технический результат достигается включением новых блоков и иной связью между блоками во взлетно-посадочном устройстве беспилотного летательного аппарата, включающем устройства взлета, спуска на парашюте и на посадочную площадку, оборудованную сеткой-улавливателем и электронными посадочными средствами, заключающихся в том, что в него дополнительно введены манипулятор, консоль, двухплоскостной стабилизатор, устройство захвата строп парашюта, приемная камера, индикатор, причем манипулятор выполнен телескопическим с четырьмя степенями свободы с возможностью изменения длины и максимальной угловой скорости вращения в горизонтальной плоскости в момент взлета беспилотного летательного аппарата до значений, определимых соотношением:
Vk+Lω+VBcosα>Vвзл,
где VK - скорость корабля при старте беспилотного летательного аппарата, м/с,
L - максимальная длина манипулятора, м,
ω - максимальная угловая скорость манипулятора в момент взлета беспилотного летательного аппарата, рад/с,
VB - скорость ветра, м/с,
α - курс корабля относительно ветра, град,
Vвзл - взлетная скорость БПЛА, м/с,
Манипулятор шарнирно прикреплен одним концом к концу консоли, другой конец которой прикреплен к двухплоскостному стабилизатору, посадочная площадка выполнена раскладной и прикреплена шарнирно к окончанию манипулятора, при этом посадочная площадка снабжена сеткой-улавливателем, а электронные посадочные средства содержат укрепленные на манипуляторе пару излучателей света в разных диапазонах частоты излучения с конусообразными диаграммами направленности и приемную видеокамеру, при этом выход видеокамеры соединен с входом индикатора, установленного в рулевой рубке корабля, устройство захвата строп парашюта установлено на манипуляторе и выполнено в виде плавучего аркана, двухплоскостной стабилизатор установлен на борту корабля в средней его части, приемная камера размещена на борту корабля и выполнена с возможностью помещения в нее беспилотного летательного аппарата и поддержания в ней требуемых параметров микроклимата.
Предложенное техническое решение заключается в использовании вместо катапульты линейной скорости движения оконечности манипулятора в сумме со скоростью корабля и скоростью ветра для придания БПЛА необходимой взлетной скорости. При этом вынос посадочной площадки за борт корабля на достаточном удалении от конструкций надстроек и антенн корабля и стабилизация положения посадочной площадки независимо от бортовой и килевой качки корабля упрощают условия взлета и посадки БПЛА. Удерживание посадочной площадки в горизонтальной плоскости облегчает захват строп парашюта приводнившегося в волны беспилотного летательного аппарата, а установка манипулятора пары «разноцветных» излучателей и видеокамеры, соединенной с индикатором, установленным в рулевой рубке корабля, позволяет выводить корабль на БПЛА, удерживая курс корабля в «цветной зоне», образованной смешением цветов наподобие тому, как глиссаду самолета при посадке удерживают в равносигнальной зоне.
Покажем существенность отличительных признаков.
Введение в состав взлетно-посадочного устройства манипулятора, консоли и двухплоскостного стабилизатора является новым решением. Оно обеспечивает создание вне корпуса корабля стабилизированной посадочной площадки. При этом выполнение последней раскладной позволяет разместить на корабле в положение по-походному посадочную площадку, площадь которой в разложенном положении обеспечивает размещение и взлет БПЛА. Установка двухплоскостного стабилизатора на борту корабля в средней его части позволяет снизить интенсивность работы стабилизатора при килевой качке корабля.
Введение устройства захвата строп парашюта и установка на манипуляторе и выполнение его в виде плавучего аркана является новым решением. Оно позволяет осуществлять подъем на борт движущегося корабля приводнившегося и плавающего на поверхности воды БПЛА с парашютом и с эластичной надувной емкостью, обеспечивающей смягчение удара БПЛА об воду и придание БПЛА положительной плавучести [см. Популярная механика, №10 (156), октябрь 2015 г., с. 100-104, www.popmech.ru].
Выполнение посадочных средств, содержащими укрепленные на манипуляторе пару излучателей света в разных диапазонах частоты излучения с конусообразной диаграммой направленности и приемную видеокамеру, является новым решением. Оно позволяет визуально определить местоположение приводнившегося БПЛА относительно курса корабля и оценить возможность захвата строп парашюта БПЛА. При этом установка соединенного с видеокамерой индикатора в рулевой рубке корабля, позволяет выводить корабль на БПЛА «по приборам».
Введение манипулятора с четырьмя степенями свободы и прикрепление его к оконечности стабилизированной консоли является новым решением, что позволяет придавать посадочной площадке рациональный угол наклона для взлета БПЛА. Манипулятор с четырьмя степенями свободы позволяет совершать изменение угла поворота посадочной площадки относительно борта корабля по углам: рыскания, тангажа и крена. Данный механизм позволит проводить удаление или приближение посадочной площадки в горизонтальной плоскости относительно борта корабля.
Одновременное изменение углов наклона взлетно-посадочной площадки позволяет выбирать (настраивать) на рациональный угол наклона взлетно-посадочную площадку как вовремя старта, так и при заходе на посадку БПЛА вертолетного и самолетного типа. Оператор БПЛА в зависимости от метеоусловий погоды, тактико-технических характеристик и типа БПЛА задает (придает) данной взлетно-посадочной площадке рациональный (оптимальный) угол как вовремя взлета, так и при посадки, а также обеспечивает возможность направлять диаграммы направленности излучателей и видеокамеру в сторону приводнившегося БПЛА независимо от курса корабля. В предлагаемом техническом решении сетка-улавливатель закреплена шарнирно к посадочной площадке и выполнена с возможностью ее складывания при складывании посадочной площадки.
Размещение приемной камеры на борту корабля и выполнение с возможностью помещения в нее манипулятором беспилотного летательного аппарата и поддержания требуемых параметров микроклимата является новым решением. Оно позволяет проводить погрузку и выгрузку БПЛА без привлечения дополнительного кранового оборудования, хранить на корабле БПЛА без снижения его гарантийного срока годности, а также исключает воздействие на БПЛА нежелательных климатических и погодных факторов.
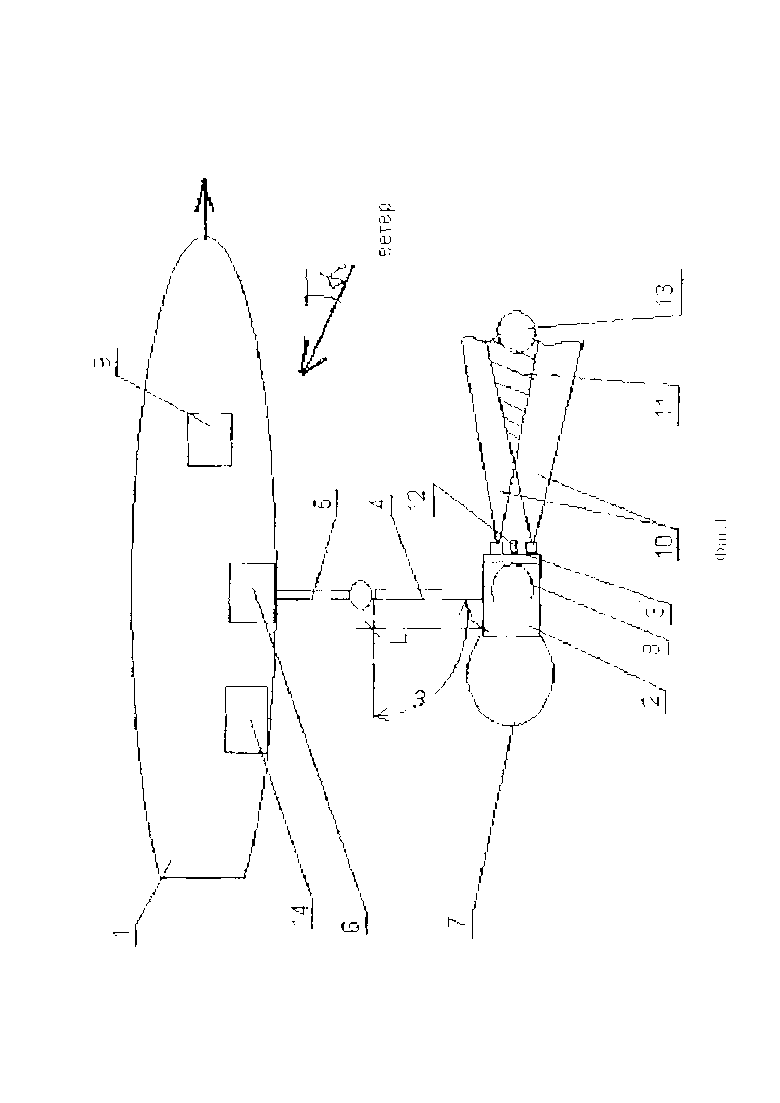
Сущность предлагаемого технического решения поясняется иллюстрацией фиг. 1, на котором представлена схема предлагаемого взлетно-посадочного устройства беспилотного летательного аппарата корабельного базирования.
Взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования включает:
1 - корабль;
2 - посадочная площадка;
3 - электронные посадочные средства.
Устройства 1…3 содержат прототип. Дополнительно к ним во взлетно-посадочном устройстве беспилотного летательного аппарата введены новые блоки или изменена конструкция блоков решения-прототипа. Посадочная площадка 2 выполнена складной, раскладывающейся по типу раскладывающихся панелей солнечной батареи космических аппаратов. Электронные посадочные средства 3 выполнены в виде укрепленных на манипуляторе пары излучателей света в разных диапазонах частоты излучения с конусообразной диаграммой направленности излучения и приемной видеокамеры.
4 - манипулятор;
5 - консоль;
6 - стабилизатор;
7 - устройство захвата строп парашюта;
8 - сетка-улавливатель;
9 - монитор (индикатор для наблюдения за обстановкой;
10 - диаграммы направленности излучателей света электронных посадочных средств, которые формируют сектор обзора для отслеживания приводнившегося БПЛА на водную поверхность;
11 - «цветная зона» излучателей света 10.
12 - видеокамера.
13 - парашют приводнившегося беспилотного летательного аппарата,
14 - приемная камера.
Предлагаемое взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования функционирует следующим образом.
В исходном состоянии консоль 5 и прикрепленный к ней манипулятор 4 с посадочной площадкой в сложенном положении находятся по-походному на борту корабля. БПЛА находится в приемной камере 14. Перед проведением взлета БПЛА отводят от борта консоль 5, а манипулятором 4 ставят посадочную площадку 2 у приемной камеры 14. Устанавливают на нее БПЛА и закрепляют его, аналогично закреплению БПЛА на катапульте. Разворачивают манипулятором 4 посадочную площадку 2 на угол, оптимальный для взлета БПЛА и разворачивают в горизонтальной плоскости манипулятор 4 в сторону носа корабля с угловой скоростью для придания линейной скорости посадочной площадки в сумме со скоростью корабля и скоростью ветра, соответствующей взлетной скорости БПЛА. В момент положения манипулятора 4 перпендикулярно борту корабля останавливают манипулятор 4. При этом БПЛА по инерции продолжает двигаться и взлетает, отрываясь от посадочной площадки 2. Консоль 5 с манипулятором 4 и посадочной площадкой 2 приводят в исходное состояние.
Для приема на борт БПЛА, совершающего посадку, устанавливают манипулятор 4 с консолью 5 и посадочной площадкой 2 перпендикулярно борту корабля. Для приема БПЛА вертикального взлета и посадки микро и сверхлегкого классов раскладывают посадочную площадку 2, устанавливают ее в горизонтальное положение и поднимают сетку-улавливатель 8. После посадки БПЛА на посадочную площадку 2 манипулятором 4 подводят посадочную площадку 2 к приемной камере 14 и эвакуируют БПЛА. Консоль 5 с манипулятором 4 и посадочной площадкой 2 приводят в исходное состояние.
Для приема БПЛА, приводнившегося по командам автоматической системы управления на парашюте, посадочную площадку 2 не раскладывают, устанавливают манипулятор 4 с консолью 5 и посадочной площадкой 2 перпендикулярно борту корабля. Включают электронные посадочные средства 3 и путем разворачивания манипулятора 4 наводят их диаграммы направленности 10 на парашют БПЛА 13. Опускают устройство захвата строп парашюта 7 и, управляя кораблем путем выдерживания его в «цветной зоне» 11, переданной на индикатор 9, установленный в рулевой рубке корабля, совмещают устройство захвата строп парашюта 7 со стропами парашюта 13 приводнившегося БПЛА. Поднимают манипулятором 4 БПЛА из воды и с его помощью переносят БПЛА за стропы его парашюта 13 к приемной камере 14. С помощью известных технических средств приемной камеры 14, в нее помещают БПЛА.
Таким образом, на основе анализа структуры и функционирования схемы предложенного технического решения можно заключить, что взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования, в котором реализовано данное решение, обладает преимуществами, отвечающими поставленной цели - обеспечение взлета и посадки беспилотного летательного аппарата в условиях эксплуатации его на кораблях, не имеющих достаточно свободную палубу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА НА АЭРОФИНИШЕР | 2009 |
|
RU2399560C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС АВИАНЕСУЩЕГО КОРАБЛЯ | 2012 |
|
RU2494005C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля | 2015 |
|
RU2620848C2 |
Взлетно-посадочное устройство беспилотного летательного аппарата содержит устройство взлета, устройства спуска на парашюте, посадочную площадку, телескопический манипулятор с четырьмя степенями свободы, консоль, двухплоскостной стабилизатор, устройство захвата строп парашюта, приемную камеру, индикатор, установленные определенным образом. Посадочная площадка содержит сетку-улавливатель и электронные посадочные средства, которые содержат два излучателя света в разных диапазонах частоты излучения с конусообразными диаграммами направленности и видеокамеру. Обеспечивается взлет и посадка беспилотного летательного аппарата в условиях эксплуатации его на кораблях, имеющих ограниченную палубу. 1 ил.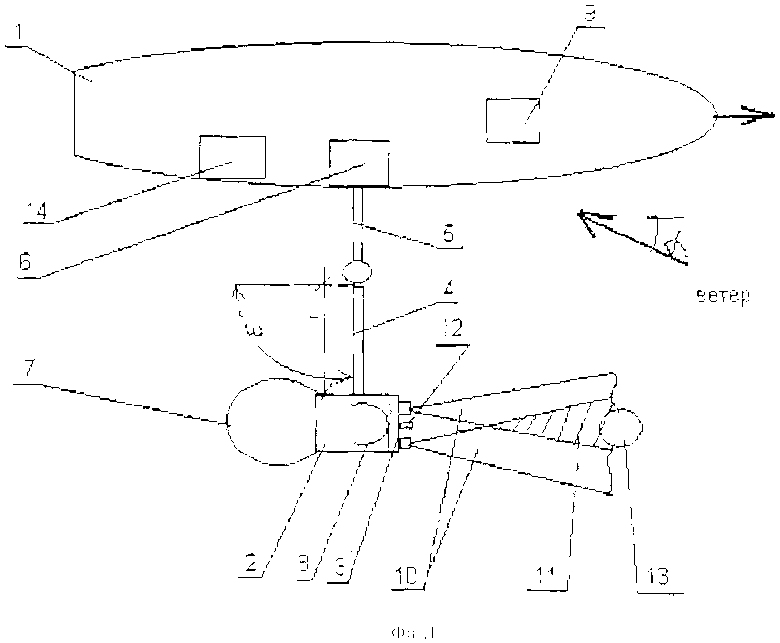
Устройство для взлета и посадки беспилотного летательного аппарата, содержащее посадочную площадку, устройство захвата строп парашюта, манипулятор с закрепленными на нем видеокамерой и электронными посадочными средствами излучения в разных диапазонах частоты с конусообразными диаграммами направленности, консоль, двухплоскостной стабилизатор, приемную камеру и индикатор, причем к посадочной площадке шарнирно закреплен своим концом манипулятор, который другим своим концом шарнирно прикреплен к консоли, при этом другой конец консоли соединен с двухплоскостным стабилизатором, причем манипулятор выполнен телескопическим с четырьмя степенями свободы и возможностью изменения угловой скорости, а сетка-улавливатель шарнирно прикреплена к посадочной площадке и выполнена с возможностью ее складывания при складывании посадочной площадки в приемную камеру.
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| Синхронная машина | 1959 |
|
SU130964A1 |
| WO 2015168181 A1, 05.11.2015 | |||
| US 8028952 B2, 04.10.2011 | |||
| US 20150266575 A1, 24.09.2015. | |||

