Изобретение относится к подъемно-транспортному машиностроению.
Для проведения грузовых (погрузочно-разгрузочных) работ применяются погрузочные манипуляторы, содержащие секционную грузозахватную стрелу и силовые цилиндры для подъема и "излома" стрелы в вертикальной плоскости. Для поворота стрелы в плане в горизонтальной плоскости стрела с упомянутыми цилиндрами монтируется на поворотной платформе, приводимой во вращение механизмом поворота (вращения) [1]
Однако подобные манипуляторы обладают повышенными габаритами и массой. Наряду с этим при развороте стрелы в горизонтальной плоскости система характеризуется повышенной динамичностью из-за крайне низкой жесткости структуры в поперечном направлении.
Известен также манипулятор для проведения грузовых работ, который содержит опорно-поворотное устройство, секционную грузозахватную стрелу, включающую основную секцию с расположенными под углом друг к другу силовыми цилиндрами, штоки которых посредством опорного шарнира соединены между собой и с основной секцией стрелы, а также дополнительный силовой цилиндр и поворотную стойку с парой проушин на каждом ее конце, один из которых соединен с основной секцией стрелы [2]
При таком выполнении манипулятора для проведения грузовых работ достигается пространственное перемещение грузозахватной стрелы, уменьшение габаритов и массы конструкции. Однако в этом манипуляторе недостаточная зона действия и недостаточно высокая жесткость структуры.
Согласно изобретению в манипуляторе для проведения грузовых работ противоположная пара проушин поворотной стойки шарнирно закреплена на опорно-поворотном устройстве, на котором на общей оси с проушинами установлен и один конец дополнительного силового цилиндра, противоположный конец которого соединен с основной секцией стрелы, при этом центр опорного шарнира двух силовых цилиндров размещен на общей оси с проушинами поворотной стойки, соединенными с основной секцией стрелы. Наряду с этим поворотная стойка выполнена в виде охватывающей стрелу и опорно-поворотное устройство преимущественно Н-образной плоской формы, концы которой снабжены проушинами. При таком выполнении манипулятора для проведения грузовых работ расширяется зона его действия, повышается жесткость структуры.
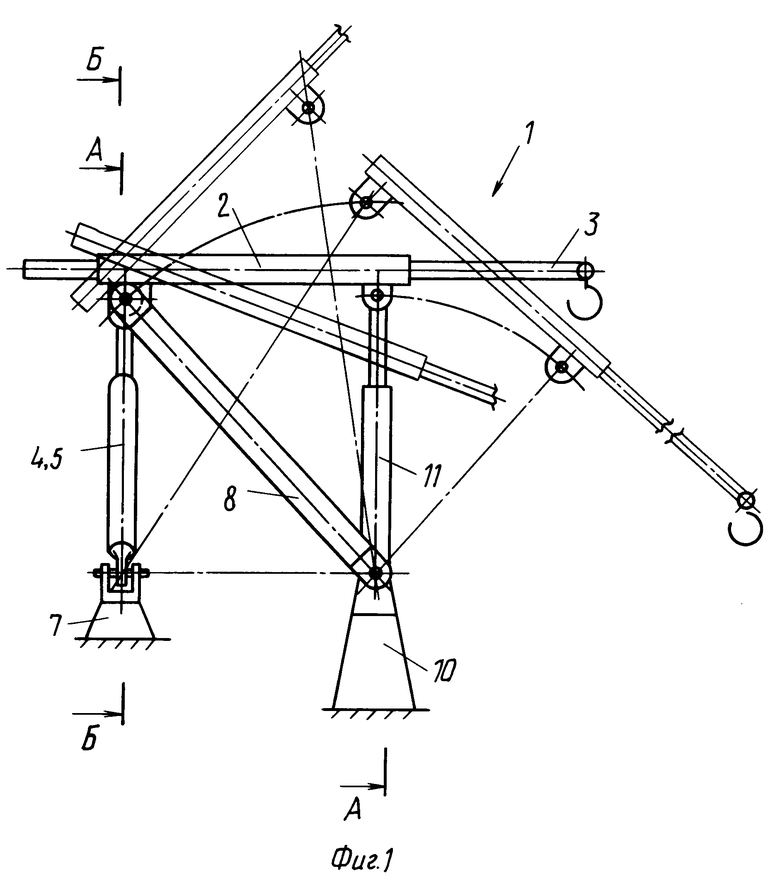
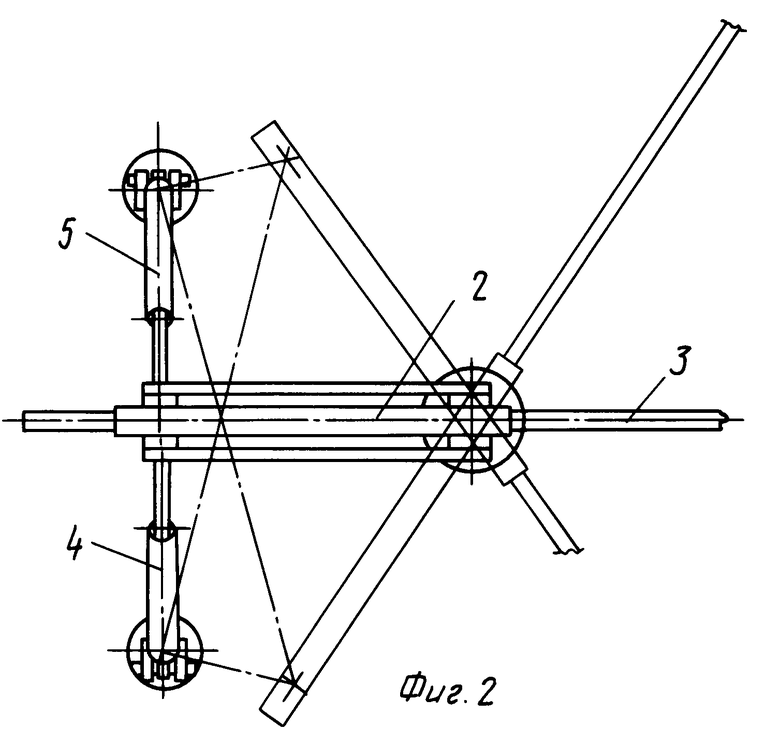
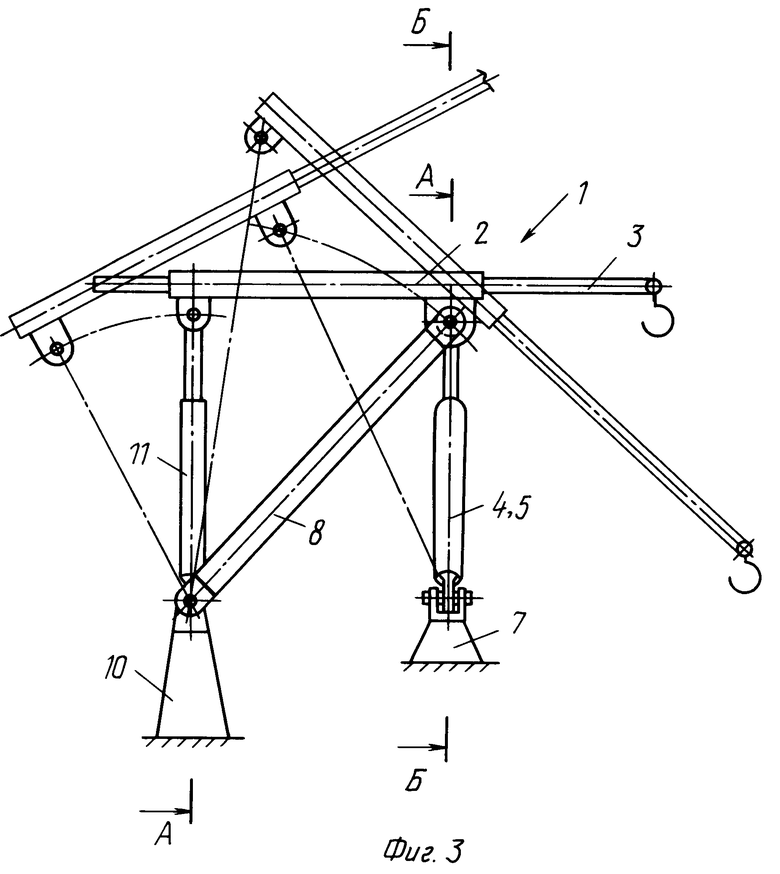
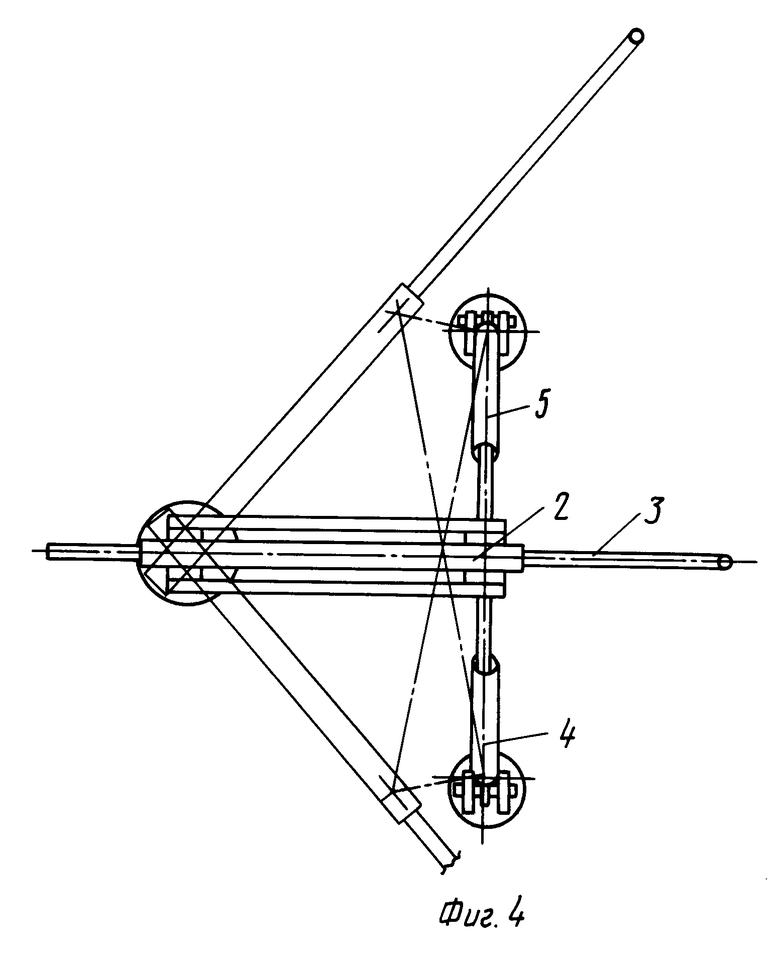
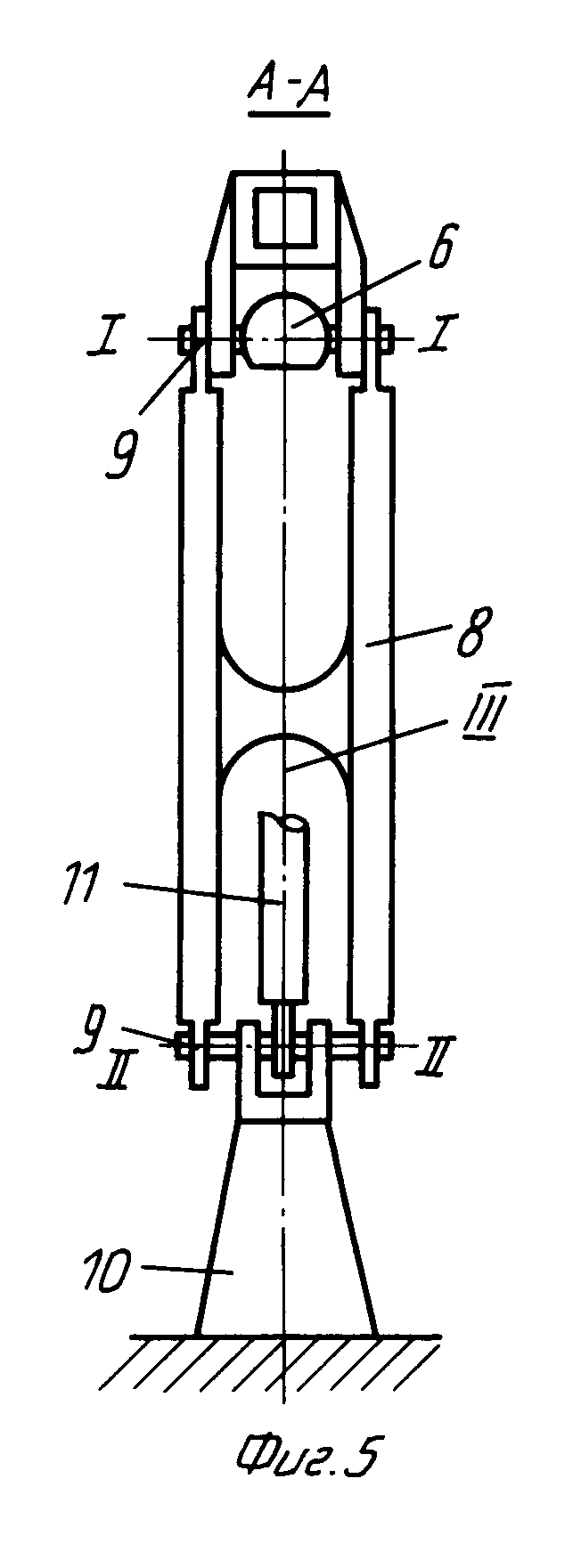
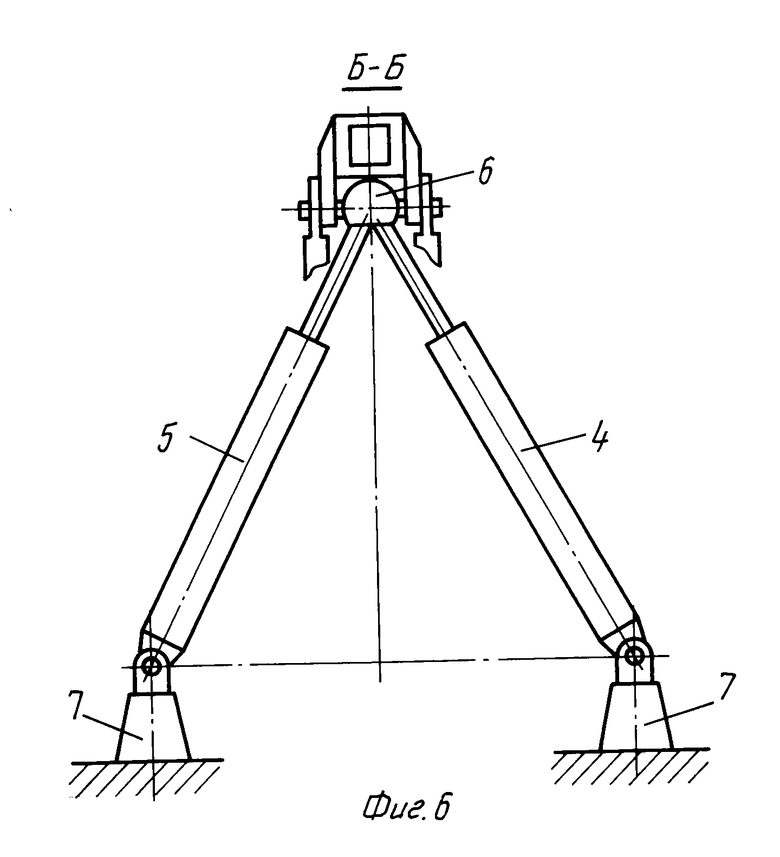
На фиг. 1 показан предлагаемый манипулятор, вид сбоку; на фиг. 2 то же, вид в плане; на фиг. 3 вариант исполнения манипулятора, вид сбоку; на фиг. 4 то же, вид в плане; на фиг. 5 сечение А-А на фиг.1 и 3; на фиг. 6 сечение Б-Б на фиг.1 и 3.
Манипулятор для проведения грузовых работ содержит секционную грузозахватную стрелу 1, которая включает в себя основную секцию 2 и, например, выдвижную секцию 3. Стрела может быть выполнена и в виде шарнирно-сочлененной системы. Для подъема и поворота стрелы предусмотрено два силовых цилиндра 4 и 5. Эти цилиндры расположены под углом друг относительно друга, их штоки сведены вместе и посредством опорного шарнира 6 соединены между собой и с основной секцией 2 стрелы 1. Противоположные концы (корпуса) силовых цилиндров 4 и 5 смонтированы на основании с помощью шарниров 7 с двумя степенями свободы. Манипулятор снабжен поворотной стойкой 8, которая выполнена преимущественно в виде Н-образной плоской формы, концы которой заканчиваются проушинами 9. Один конец поворотной стойки охватывает основную секцию 2 стрелы и своими проушинами 9 шарнирно соединен с последней. Противоположный конец поворотной стойки 8 охватывает опорно-поворотное устройство 10 и другой парой проушин 9 шарнирно соединен с подвижной частью этого устройства. Оси I-I и II-II, проходящие соответственно через верхние и нижние пары проушин 9 поворотной стойки 8, параллельны между собой, при этом ось I-I проходит через центр опорного шарнира 6 и совпадает с его горизонтальной осью, а ось II-II совпадает с горизонтальной осью опорно-поворотного устройства 10. Вертикальная ось III-III этого устройства совпадает с осью симметрии поворотной стойки 8 и перпендикулярна оси II-II. В состав манипулятора входит также дополнительный силовой цилиндр 11, один конец которого шарнирно закреплен на горизонтальной оси II-II опорно-поворотного устройства 10, противоположный конец дополнительного цилиндра соединен с основной секцией 2 стрелы 1. Продольная ось дополнительного цилиндра 11 может быть параллельна плоскости, проходящей через дополнительные оси силовых цилиндров 4 и 5 (при втянутых штоках всех трех цилиндров). Варианты исполнения, показанные соответственно на фиг. 1,2 и фиг. 3,4, отличаются между собой взаимным расположением описанных элементов манипулятора.
Описанный манипулятор для проведения грузовых работ работает следующим образом.
Строповка груза и изменение вылета грузозахватной стрелы 1 за счет перемещения выдвижной секции 3 относительно основной секции 2 производится в обычном порядке. При изменении наклона стрелы 1 в вертикальной плоскости работают дополнительным силовым цилиндром 11. В этом случае стрела разворачивается относительно горизонтальной оси I-I опорного шарнира 6; силовые цилиндры 4 и 5 и поворотная стойка 8 остаются неподвижными, образуя пространственную структуру повышенной жесткости. Наклон стрелы 1 в вертикальной плоскости (по другой траектории) и расширение зоны действия манипулятора осуществляется также одновременным выдвижением (втягиванием) штоков силовых цилиндров 4 и 5. В этом случае плоская структура повышенной жесткости, состоящая из стрелы 1, поворотной стойки 8 и дополнительного силового цилиндра 11, разворачивается как одно целое относительно горизонтальной оси II-II опорно-поворотного устройства 10; расположенные под углом друг к другу силовые цилиндры 4 и 5 придают системе дополнительную жесткость. Для разворота стрелы 1 в горизонтальной плоскости, а также для совмещенного перемещения стрелы одновременно с вертикальной и горизонтальной плоскостях задействуют один или оба силовых цилиндра 4 или 5. В частности при работе только одного из силовых цилиндров 4 или 5 стрела 1 (вместе с поворотной стойкой 8 и дополнительным силовым цилиндров 11) разворачивается одновременно в вертикальной и горизонтальной плоскостях относительно осей II-II и III-III (также одновременно) опорно-поворотного устройства 10. Опорный шарнир 6 и шарниры 7 обеспечивают силовым цилиндром 4 и 5 необходимые степени свободы. В общем случае сочетанием работы силовых цилиндров 4 и 5 стрелу 1 по оптимальной траектории выводят в заданное положение в пространстве. Повышенная жесткость структуры сохраняется и в этом режиме работы за счет взаимного расположения секции 2 стрелы 1, поворотной стойки 8, дополнительного силового цилиндра 11 и силовых цилиндров 4 и 5. В вариантах исполнения манипулятора (фиг. 1,2 и фиг. 3,4) зона действия стрелы 1 различна. В частности, в исполнении, показанном на фиг. 3 и 4, стрела 1 имеет расширенную зону действия в горизонтальной плоскости за счет большего вылета стрелы.
Таким образом, в описанном манипуляторе для проведения грузовых работ достигаются следующие преимущества: расширение зоны действия за счет перемещения стрелы с помощью как основных, так и дополнительного силовых цилиндров и особенностей кинематики манипулятора; повышение жесткости структуры за счет наличия в конструктивно-кинематической схеме манипулятора объемных образований при любом режиме работы, следствием чего является повышение стабильности работы и снижение динамических нагрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| Манипулятор для проведения грузовых работ | 1982 |
|
SU1090593A2 |
| Передвижное грузоподъемное устройство | 1982 |
|
SU1102768A1 |
| СТРЕЛА ГРУЗОПОДЪЕМНОГО СРЕДСТВА | 2003 |
|
RU2231494C1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
Использование: в подъемно-транспортном машиностроении. Сущность изобретения: манипулятор содержит опорно-поворотное устройство, секционную грузозахватную стрелу, включающую основную секцию с расположенными под углом друг к другу силовыми цилиндрами, штоки которых посредством опорного шарнира соединены между собой и с основной секцией стрелы; манипулятор содержит также дополнительный силовой цилиндр и поворотную стойку с парой проушин на каждом ее конце, один из которых соединен с основной секцией стрелы. В манипуляторе противоположная пара проушин поворотной стойки шарнирно закреплена на опорно-поворотном устройстве, на котором на общей оси с проушинами установлен и один конец дополнительного силового цилиндра, противоположный конец которого соединен с основной секцией стрелы, при этом центр опорного шарнира двух силовых цилиндров размещен на общей оси с проушинами поворотной стойки, соединенными с основной секцией стрелы. 1 з. п. ф-лы, 6 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
