Изобретение относится к измерительной технике, касающейся проверки соосности, измерения углов и т.п. Более точно объектом изобретения является устройство для контроля расположения прямолинейных направляющих в аппаратах колонного типа, обеспечивающее измерение углового расстояния между направляющими и проверку соосности линии пересечения плоскостей нормалей к центральной линии опорных поверхностей этих направляющих относительно оси аппарата колонного типа.
Известны устройства для контроля положения плоскостей несущих элементов с помощью светового луча, которые содержат стойку с мишенью, устанавливаемую на несущем элементе и располагаемую мишенью перпендикулярно оси светового луча. Известны также машины для измерения несоосности или отклонения от прямолинейности рельсового пути или дорожного полотна, содержащие три опорные тележки, из которых две располагаются на одном рельсе, несущие платформу, на которой установлена мишень для определения положения платформы относительно оси светового луча [1]
Однако такие машины способны контролировать положение рельсов или других прямолинейных направляющих только на плоской поверхности.
Известен комплект оборудования, предназначенный для разметки и контроля положения конструкционных элементов в аппаратах колонного типа, содержащий источник реперного светового излучения и устройство в виде подвижной с визирным средством для определения положения каретки относительно оси светового луча [2] Подобное устройство, включающее каретку с опорами для базирования на направляющих и стойку с мишенью в качестве визирного средства, установленную на каретке со стороны, противоположной опорам, является ближайшим аналогом изобретения, применяющимся до настоящего времени. При использовании таких устройств выверку в вертикальной и горизонтальной плоскостях выполняли отдельно по каждой направляющей с использованием дополнительных средств измерения для определения их положения относительно друг друга и с осуществлением пересчета из измеряемых координат прямолинейной системы в угловую систему измерения. Это обусловливало сложность и большую трудоемкость работ по юстировке направляющих.
В основу изобретения поставлена задача создания такого устройства для контроля расположения прямолинейных направляющих в аппаратах колонного типа, которое могло бы, базируясь на обеих направляющих, одновременно определять их общее положение относительно оси аппарата и угловое расстояние между этими направляющими.
Эта задача решена в устройстве для контроля расположения прямолинейных направляющих в аппаратах колонного типа, содержащем каретку с опорами, предназначенными для базирования на направляющих, и стойкой с мишенью, в котором опоры выполнены в виде трех башмаков, из которых два предназначены для базирования на одной направляющей, а третий на второй, и каждый из которых выполнен с цилиндрической базовой поверхностью, радиус которой равен заданному расстоянию расположения опорных поверхностей направляющих относительно оси аппарата, а ось проходит через центр мишени. При этом со стороны опор к каретке прикреплен блок с раздвижными упорами, предназначенными для взаимодействия с боковыми сторонами направляющих, и установлен индикаторный прибор, служащий для измерения положения упоров.
Благодаря такому решению после постановки устройства на направляющие можно сразу же определить по расположению светового пятна на мишени расположение обеих направляющих относительно оси аппарата. При этом раздвижные упоры прикреплены к каретке, а поэтому, приводя их в контакт с боковой стороной направляющих, с помощью индикаторного устройства можно измерить положение упоров относительно вертикальной продольной плоскости, проходящей через центр мишени, и угловое взаиморасположение направляющих.
Доя обеспечения возможности контроля прямолинейных направляющих в аппаратах колонного типа с определенным диапазоном варьирования диаметров этих аппаратов целесообразно, чтобы башмаки, стойка с мишенью и блок с раздвижными упорами были выполнены сменными.
Предпочтительно, чтобы блок с раздвижными упорами был оснащен пружинами для сдвижения упоров и клином с приводным механизмом между смежными торцами упоров. В этой модификации, обеспечивается более простая связь с индикаторным устройством, а кроме того, нулевая установка на заданное угловое расстояние между направляющими.
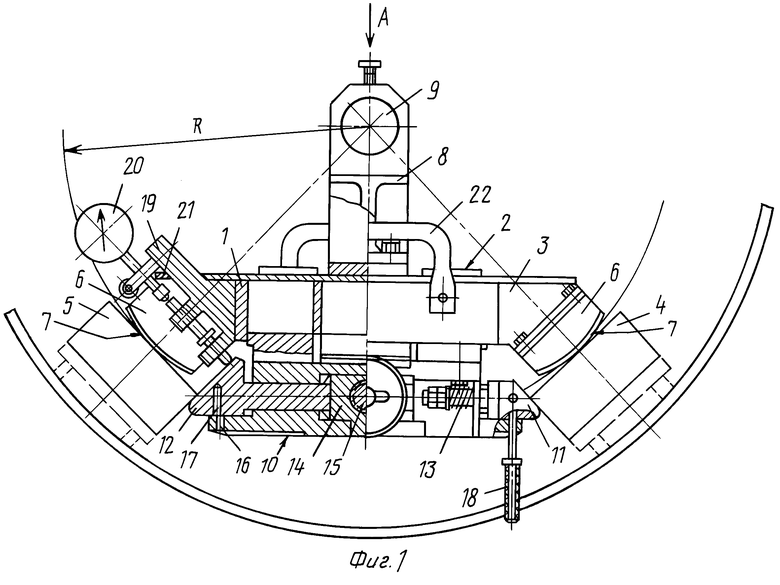
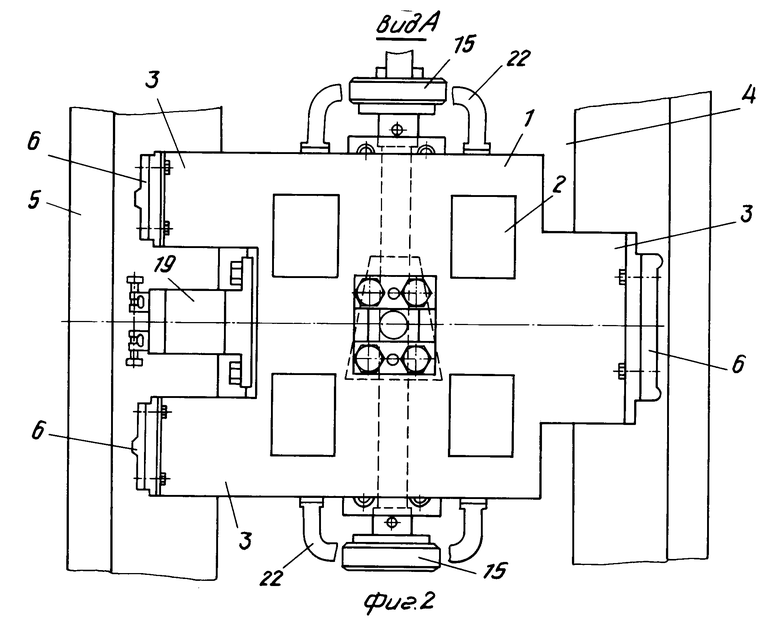
На фиг. 1 изображено устройство для контроля расположения прямолинейных направляющих в аппарате колонного типа, общий вид; на фиг. 2 вид по стрелке А на фиг. 1.
Основной несущей частью устройства является каретка 1, на верхней поверхности которой имеются четыре площадки 2 для установки квадратов (на чертежах не показан), используемого в качестве вспомогательного прибора при необходимости контроля уровня.
На трех боковых выступах каретки 1 закреплены опоры 3 для базирования на прямолинейных направляющих 4 и 5, выполненные в виде башмаков 6 с базовыми поверхностями 7, из которых два предназначены для базирования на одной направляющей 5, а третий на другой 4.
На центральной площадке сверху каретки установлена стойка с мишенью 9. Как этом видно на фиг. 1, базовые поверхности 7 башмаков 6 являются цилиндрическими с общей осью, проходящей через центр мишени 9. При этом радиус R окружности этих цилиндрических поверхностей соответствует заданному расстоянию расположения опорных поверхностей направляющих 4 и 5 относительно оси аппарата колонного типа, в котором они монтируются. Это заданное значение соответствует такому положению направляющих 4 и 5, при котором линия пересечения нормалей к центральной линии пересечения нормалей к центральной линии пересечения опорных поверхностей этих направляющих будет совпадать с осью аппарата, в котором монтируются направляющие 4 и 5. Башмаки 6 и стойка 8 соединены с кареткой 1 разъемными соединениями, в частности болтовыми, и могут быть заменены на другие, отличающиеся соответственно по радиусу базовой поверхности башмаков 6 и высоте стойки 8 из некоторого диапазона типоразмеров.
K нижней части каретки 1 со стороны, противоположной стойке 8 с мишенью 9, прикреплен блок 10 с раздвижными упорами 11 и 12 для взаимодействия с боковыми сторонами направляющих 4 и 5. При этом линия перемещения этих упоров 11 и 12 перпендикулярна вертикальной продольной плоскости, проходящей через центр мишени 9 и ось общей цилиндрической поверхности базовых поверхностей 7 башмаков 6 и, следовательно, проходит через хорду окружности этих цилиндрических поверхностей. Внешние торцевые поверхности упоров 11 и 12 выполнены скошенными под углом, соответствующим углу расположения боковых сторон направляющих 4 и 5 относительно горизонтальной плоскости.
Упоры 11 и 12 имеют прямоугольное поперечное сечение и установлены в соответствующих отверстиях корпуса блока 10, при этом они находятся под воздействием пружин 13, обеспечивающих их сдвижение. В этом же корпусе установлен клиновой механизм, включающий клин 14 между смежными внутренними торцами упоров 11 и 12, который перемещается с помощью приводного винта 15. В корпусе блока 10 и на упорах 11 и 12 выполнены отверстия 16 и 17 соответственно для установки в них стопорных пальцев 18, которые фиксируют расчетное раздвижение упоров 11 и 12 на заданное угловое взаиморасположение направляющих 4 и 5.
Каретка 1 выполнена с кронштейном 19, на котором установлен стрелочный индикаторный прибор 20, регистрирующий положение его наконечника 21, контактирующего со скошенной торцевой поверхностью одного из упоров (упор 12). При этом шкала индикаторного устройства имеет деления в угловых координатах, а среднее положение шкалы соответствует нулевому значению, соответствующему заданному взаимному угловому расположению направляющих 4 и 5. Каретка 1 оснащена также ручками 22 для ее перемещения вдоль направляющих 4 и 5.
Изображенное на чертежах устройство является одним из примеров осуществления изобретения. В соответствии с его сущностью возможны различные другие конкретные формы его реализации. В частности, высота стойки 8 может изменяться за счет использования соответствующих приставок между ее основанием и соответствующей площадкой на каретке 1 или для изменения высоты расположения мишени 9 может быть использовано подходящее подвижное соединение ее со стойкой, не требующей каких-либо переналадок или замены. При изменении угла заданного взаимного расположения направляющих 4 и 5 могут быть использованы клиновые проставки между кареткой 1 и башмаками 6, а также плоские проставки между кареткой 1 и блоком 10 раздвижных подпружиненных упоров 11 и 12 и сменные наконечники этих упоров с варьируемыми в определенном диапазоне углами скоса их торцевых поверхностей и расположением отверстий 17 под стопорные пальцы 18. Кроме того, в качестве индикаторного прибора 20 может быть использован измерительный преобразовательный механизм, связанный с приводным винтом 15, при этом можно исключить применение стопорных пальцев 18. В любой из этих и других возможных модификациях изобретения использование устройства осуществляется в основном так, как это описано далее по отношению к устройству, изображенному на чертежах.
При подготовке устройства к работе с помощью приводного винта 15 перемещают клин 14, раздвигая упоры 11 и 12 в такое положение, когда отверстия 16 и 17 совместятся. После этого в эти отверстия устанавливают стопорные пальцы 18 для фиксации расчетного расстояния между торцами упоров 11 и 12, соответствующего заданному расстоянию между направляющими 4 и 5. Далее при этом положении упоров 11 и 12 устанавливают в нулевое положение стрелку индикаторного прибора 20, приводным винтом 15 выводят клин 14 и вынимают стопорные пальцы 18, обеспечивая сдвижение упоров 11 и 12 под действием пружин 13. В результате этого устройство оказывается готовым к работе.
После предварительной установки направляющих 4 и 5 на соответствующих опорах в аппарате колонного типа и привязки к его оси реперного источника светового луча на направляющих 4 и 5 размещают описанное выше устройство. Регулируя радиальное положение этих направляющих, например, с помощью прокладок между ними и опорами обеспечивают совмещение оси светового луча с центром мишени 9. Вращением приводного винта 15 обеспечивают раздвижение упоров 11 и 12 до касания ими боковых сторон направляющих 1 и 5 и по индикаторному прибору 20 определяют взаимное угловое расположение направляющих 4 и 5. При отклонении стрелки индикаторного прибора 20 от нулевого значения осуществляют соответствующие изменения взаимного расположения направляющих.
Далее, переставляя устройство вдоль направляющих 4 и 5, осуществляют контроль их расположения по всей длине аппарата колонного типа.
Устройство может быть одинаково успешно использовано как при монтаже прямолинейных направляющих в аппарате колонного типа, так и при контроле их после определенного периода эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОВЕРХНОСТИ ВРАЩЕНИЯ ДЕТАЛИ | 1996 |
|
RU2111089C1 |
| Устройство для контроля профиля лопасти рабочего колеса гидромашины | 1980 |
|
SU978642A1 |
| УСТРОЙСТВО ДЛЯ УГЛОВОЙ ОРИЕНТАЦИИ ШАТУННЫХ ШЕЕК КОЛЕНЧАТЫХ ВАЛОВ ПРИ ШЛИФОВАНИИ | 2001 |
|
RU2193960C2 |
| УСТАНОВКА ДЛЯ РАЗДЕЛЕНИЯ ТУШ ЖИВОТНЫХ НА ПОЛУТУШИ | 1992 |
|
RU2048108C1 |
| СПОСОБ КОНТРОЛЯ НЕПРЯМОЛИНЕЙНОСТИ ОСИ ЦИЛИНДРИЧЕСКОГО ОБЪЕКТА | 1973 |
|
SU362187A1 |
| ПЕРЕНАЛАЖИВАЕМЫЙ КОНДУКТОР ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ В МНОГОГРАННИКАХ | 1992 |
|
RU2071872C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ КОНТРОЛЯ ЦЕПОЧКИ РАЗМЕРОВ ИЗДЕЛИЯ | 1969 |
|
SU236019A1 |
| Устройство для крепления выработанного пространства на крутопадающих пластах | 1940 |
|
SU63703A1 |
| УСТРОЙСТВО для ВВОДА в ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ КООРДИНАТ ТОЧЕК КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙДЕТАЛЕЙ | 1970 |
|
SU273446A1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
Устройство относится к области измерительной техники, касающейся контроля соосности, уклонов и т. п. Устройство содержит каретку с опорами для базирования на направляющих и стойку с мишенью, служащей для определения положения каретки относительно оси реперного светового луча. В этом устройстве опоры выполнены в виде трех башмаков с цилиндрическими базовыми поверхностями, ось которых располагается в центре мишени, а их радиус равен расчетному расстоянию расположения опорных поверхностей направляющих относительно оси аппарата. При этом нижняя часть каретки оснащена блоком с раздвижными упорами, взаимодействующими с боковыми сторонами направляющих и индикаторным прибором для измерения расстояния между этими направляющими. Устройство позволяет значительно упростить процесс монтажа направляющих в аппаратах колонного типа. 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для разметки положения узлов в аппаратах колонного типа и монтажа этих аппаратов | 1977 |
|
SU667795A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
