{, Ч. ь,„„ cosj,,,
(2)
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА | 2017 |
|
RU2657701C1 |
| Способ определения вертикальной структуры поля течения на ходу судна | 1980 |
|
SU1026057A1 |
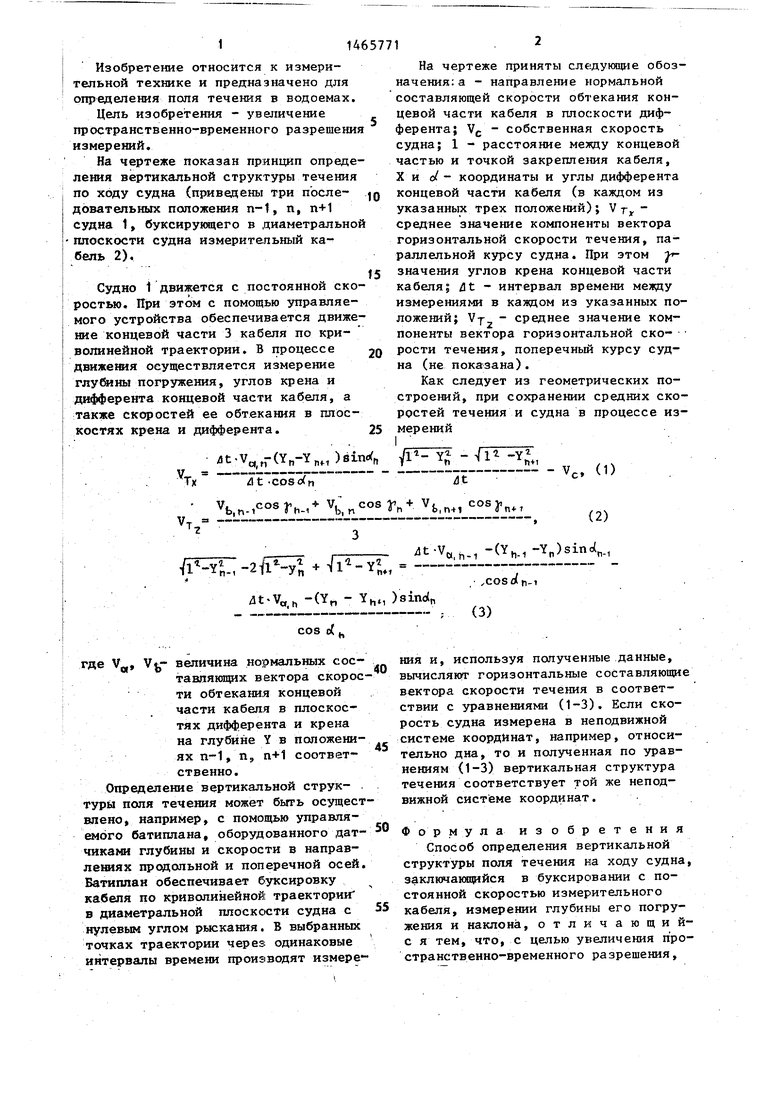
Изобретение относится к измерительной технике и предназначено для определения вертикальной структуры поля течения на ходу судна. Способ заключается в том, что измерительный кабель 2 буксируют по криволинейной траектории с нулевым углом рысканья, например, с помощью батиплана благодаря соответствугацим управляющим сигналам, поступающим на элементы ориентации по кабелю с буксирующего судна 1. При этом через заданные промежутки времени в трех точках траектории измеряют глубину, углы крена, дифферента и составляюпще вектора скорости обтекания концевого кабеля. Горизонтальные составляющие реактора скорости течения, одна из которых параллельна, а другая перпендикулярна курсу судна, вычисляют по системе уравнений, включающих измеренные параметры. 1 ил. С (Л
гг ги-1
/It Vo -(Y - УИИ )
cos o( h
Jt
где V, величина нормальных сое- тавпяющих вектора скорости обтекания концевой части кабеля в плоскостях дифферента и крена на глубине Y в положениях п-1, п, п+1 соответственно.
Определение вертикальной структуры поля течения может быть осуществлено, например, с помощью управляемого батиплана, оборудованного датчиками глубины и скорости в направ- ле191ях продольной и поперечной осей. Батиплан обеспечивает буксировку кабеля по криволинейной траектории в диаметральной плоскости судна с нулевым углом рыскания. В выбранных точках траектории через одинаковые интервалы времени щ)оиз1Водят измере
гг ги-1
И )
JtVy,., -(Y,,.,-Y)sinci,,,
coso(n-i (3)
5
0
ния и, используя полученные данные, вычислянхг горизонтальные составляющие вектора скорости течения в соответствии с уравнениями (1-3). Если скорость судна измерена в неподвижной системе координат, например, относительно дна, то и полученная по уравнениям (1-3) вертикальная структура течения соответствует той же неподвижной системе координат.
Формула изобретения
Способ определения вертикальной структуры поля течения на ходу судна, заключающийся в буксировании с постоянной скоростью измерительного кабеля, измерении глубины его погружения и наклона, отличающий- с я тем, что, с целью увеличения пространственно-временного разрешения,
31465771
буксировку кабеля осуществляют в ди-чения нормальных составляющих скоаметральной гатоскости судна, а дни-ростей ее обтекания в плоскостях крежение концевой части кабеля - по криволинейной траектории, в трех точках траектории через равные интервалы времени измеряют углы крена и дифферента концевой части, а также знана и дифферента, а компоненты вектора горизонтальной скорости течения, параллельную V-p и перпендикулярную Vy курсу судна, определяют на основании следующей системы уравнений:
t V«.n -(Y.-Y«,,)slTMfn - ,,
TX
/3t
rr
b.h-. °s.-/Vb-nCosj.+Vfc,.,cosy,, - -;
- - 4t.V«,,.,-(Y.,-Y)sinof,
2 VI . {TOF ----j--/It..-Y.,,, )sind
а,ц h cos o(f.
де
Vc собственная скорость
судна;25
Y,o(, 7 - значения глубины, угла дифферента и крена концевой части кабеля;
V,V-L - величины нормальных составляющих вектора ско- . 2Q рости ее обтекания в плоскостях дифферента и
ростей ее обтекания в плоскостях крена и дифферента, а компоненты вектора горизонтальной скорости течения, параллельную V-p и перпендикулярную Vy курсу судна, определяют на основании следующей системы уравнений:
- ,,
/3t
c
-CY.-Y.,,,
а,ц h cos o(f.
крена (в положениях п-1, п, п+1 соответственно); - интервал времени между измерениями в каждом из указанных положений; - расстояние между концевой частью и точкой закрепления кабеля.
| Руководство по гидрологическим работам в океанах и морях, Л.; Гидро- метеоиздат, 1977 | |||
| Способ определения вертикальной структуры поля течения на ходу судна | 1980 |
|
SU1026057A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
