ГП00 О 05
сл кэ
-2
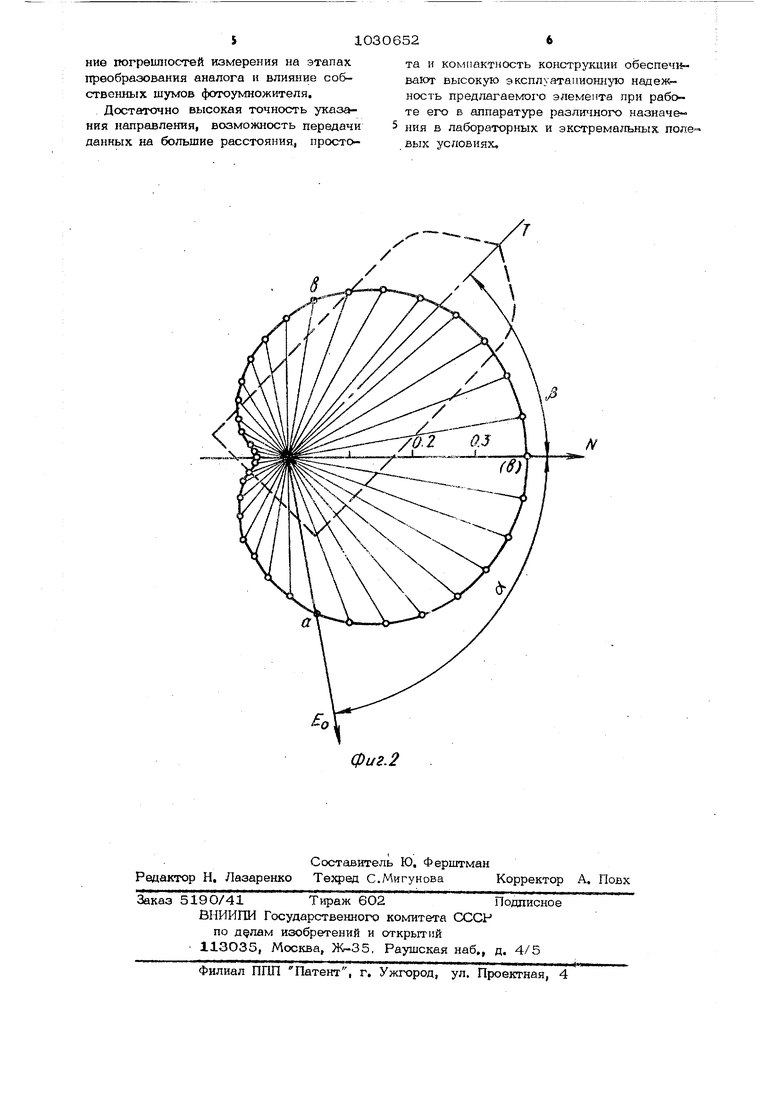
фиг/ Изобретение относится к приборостр ению, конкретнее к устройствам для определения направления магнитного поля Земли, и может быть использован в погружаемой аппаратуре при океано графических и лимнологических исследованиях, а также в аппаратуре наземного использования. Известны устройства для определения направления магнитного и географического полюсов Земли, используемы в иел51Х навигации, ориентирования на местности, при геологоразведочных раз работках, геомагнитных съемках и т.д В этих устройствах чувстветельными элементами служат магнитные стержни электромагниты, гониометры, датчики Холла, изотопные, феррозондовые, электронные и другие датчики, а также всевозможные разновидности гироскошь ческих систе л. Примерами таких устро ств могут служить электромагнитный компас с феррозондом кольиевог-о типа и электронный дистанционный компа в котором в качестве чувствительного элемента используется малогабаритная электронно-лучевая трубка, установленная на кардановом подвесе, связанном с транспортным средством. Принцип работы такого компаса основан на свойстве электронного пучка трубки отклоняться от вертикали в западном направлении под воздействием магнитного поля Земли З . Известные компасы с существующим типами чувствительных элементов оказы ваются конструктивно громоздкими, имеют сложные электрические схемы, их показанняя отягощены погрешностями, обусловленными. вли5шием вертикал ной составляющей магнитного поля Земли. Все это затрудняет возможность использования электронного компаса в океанографической аппаратуре, работающей, как правило, в экстремальных условиях. Целью изобретения является упрощ нив конструкции и схемы электронного кспдпаса, его кинем5 тической и элект ройной схем и повьппение точности покаааний. Поставленная цель достигается прим нением фотоэлектронного умюжителя в качестве чувствительного элемента эадкгронного компаса. На фиг 1 схематически изофажаи оаин из воакгожных вариантов вьшолне нвя электронного дистанционного ко паса с фотоэлектронным укяюжнтелем; на фиг. 2 - амплитудная характеристика фотоумножителя в полярной системе координат. Электронный дистанционный компас содержит фотоумножитель 1 с делителем напряжения (не показан), возбуждающий источник 2 света, аналоговый преобразователь 3, борт-индикатор 4, карааново кольцо 5 и следящую систему, включающую в себя нуль-орган 6, балансный усилитель 7, исполнительный двигатель 8, редуктор 9 и следящую рамку 10. Возбуждающий источник 2 света вы- полнен в виде таблетки из светосостава постоянного свечения и расположен вблизи фотокатода фотоумножителя 1. Фотоумножитель 1 с делителем напряжения и таблетка могут быть заключены в единый электростатический экран, установленный на кардановом кольце 5. На электроды фотоумножителя 1 (и на другие блоки устройства) подается напряжение от источника питания, вьшолненного в виде отдельного блока (не показан). Анод фотоумножителя 1 соединен с одним из входов нуль-органа 6, выход которого подключен к входу балансного усилителя 7. На второй вход (не показан) нуль-органа б подается стандартное напряжение (EL-.) от источника питания. Нуль-орган 6 служит для сравнения напряжения на выходе фотоумножителя 1 со стшщартным напряжением и полученияразностного сигнала (сигнала рассогласования) . Балансный усилитель 7 электрически связан с исполнительным двигателем 8, в качестве которого выбирается двигатель постоянного тока, например типа дпм. Редуктор 9 предназначен для кинематической связи исполнительного двигателя 8 со следящей рамкой 10 и аналоговым преобразователем 3. Аналоговый преобразователь 3 служит для определения угла д между базовой осью EQ фотоумножителя 1 и продольной осью Т транспортного средства, на котором установлен компас, и преобразования величины угла в электрический сигнал. Выход тфеобразователя 3 подключен к борт-индикатору 4. Следящая рамка 10 жестко связана с одной из ведомых шестерек 9 и имеет оси, на которых установлено карданово кольцо 5. Рамка 10, кардаково кольцо 5 31C и электростатический экран фотоумножителя 1 образуют кардановый подвес, пред назначенный для пространственной стабил зации геометрической оси чувствительного элемента компаса. Фотоумножитель как чувствительный элемент компаса работает следующим образом. Первичные электроны, выбитые из фотокатода умножителя 1 под действием возбуждающего источника 2 света и усиленные h -каскадами за счет напряжения на делителе фотоумножителя и явления вторичной эмиссии, собир аются анодом, создавая на нем напряжение сигнала. Характер траектории электронов, определяемый конфигурацией ускоряющего электрического поля, создаваемого элект родами фотоумножителя, в значительной мере подвержен воздействию внешних магнитных полей. Геометрия электродов такова, что при одном положении их относительно вектора напряженности магнитного поля фокусирующее действие электропов минимально, а при аиамегрально противоположном - достигает максимального значения. В соответствии с этим напряжение сигнала на выходе фотоумножителя при вращении его вокруг вертикальной оси (совпадающей с его геометрической осью) относительно магнитного поля меняется от некоторой минимальной величины до максимальной. Эти изменения могут оказаться наиболее значительными, если фотоумножитель питать пониженным напряжением. При подаче на компас пита ощего напряжения на выходе фот-оумножителя 1 появляется напряжение сигнала (Е), которое поступает на вход нуль-органа 6 где оно сравнивается со стандартным (Е), Если напряжение сигнала не равно стандартному (Ef Ej,), то на выхо де нуль-органа 6 появляется сигнал рассогласования |л Е I Е. Усиленный балансным усилителем сиг над рассогласования приводит в действие исполнительный двигатель 8, который посредством редуктора 9, следящей рамки 10 и карданового кольца 5 поворачивает чувствительный элемент до тех пор, пока сигнал рассогласования на выходе нуль-органа 6 не станет равным нулю, т.е. пока не наступит баланс напряжения: Ер.р Ер .Это соответствует случаю, |1огда базовая ось фотоумножителя (EQ} занимает строго определенное положение относительно направления на магнитный полюс Земли N. Угол об 2. 4 между базовой осью фотоумножителя Еи направлением магнитного полюса N постоянен и определяется при калибровке компаса. Положение базовой оси фотоумножителя EQ выбирается по его амплитудной характеристике из условия получе ния наибольшей разрешающей способности компаса путем задания определенного режима работы нуль-органа 6. Курсовой угол транспортного средства /3 , представляющий собой разность углов -у ис( /i J-oO, выделяется и преобразую ется преобразователем 3 в электрический аналог, который затем поступает на борт-индикатор 4. Информация о положении продольной оси транспортного средства относительно сторон света может передаваться на борт индикатор 4 как по кабельной линии связи, так и гидроакустическим каналом. При работе в автономном режиме эта информация может регистрироваться непосредственно на транспортном средстве. Для экономии технического ресурса и электроэнергии компас может работать в режиме Запрос - ответ или по заданной программе. Поскольку фотоумножитель безынерционен, время отслеживания направления целиком определяется быстродействием исполнительного двигателя и редуктором. Хотя баланс напряжений (Е- Е ) может иметь место в одном из двух положений базовой оси фотоумножителя, проходЕПцей либо через точку d , либо через точку В , устойчивым направлением является лищь одно, второе положение не неустойчиво. Устойчивое положение ра&новесия рабочей точки (Е ) на ампли тудной характеристике определяется полярностью включения исполнительного двигателя к выходу балансного усилителя. Чувствительность компаса определяется чувствительностью фотоумножителя. При соответствующем подборе о аэпа фотоумножителя, режима его питания, усиления и мощности возбуждающего источника света можно добиться высокой чувствительности. Отклонение геометрической оси фотоумножителя от вертикали в пределах 5г-10 не оказывает заметного влияния на величину его выходного сигнала, что определяется конструктивными особен- . остями электродной системы фотоумнож еля. Значительный уровень выходного напряжения {до нескольких вольт) сокращает количество каскадов усиленияг, а следовательно, ограничивает накоплюние погрешностей измерения на этапах преобразования аналога и влияние собственных шумов фотоумножителя.
Достаточно высокая точность указания направления, возможность передачи данных на большие расстояния., простота и компактность конструкции оёеспечивают высокую эксплуатационную надежность предлагаемого элемента при работе его Б аппаратуре различного назначения в лабораторных и экстремальных полевых условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для измерения искревления скважин | 1974 |
|
SU595494A1 |
| Устройство для азимутальной коррекции гироскопа направления в автоматах курса от магнитного или т.п. компаса | 1943 |
|
SU67831A1 |
| Устройство для проверки точности индукционных компасов | 1980 |
|
SU901819A1 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| СПОСОБ ИНЕРЦИАЛЬНОГО АВТОСОПРОВОЖДЕНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2498193C2 |
| Дистанционный индукционный компас | 1978 |
|
SU717536A1 |
| Гиромагнитный дистанционный датчик курса | 1944 |
|
SU67814A1 |
| Фотоследящая система телескопа | 1980 |
|
SU894684A1 |
| Оптический корреляционный координатор | 1973 |
|
SU443396A1 |
Применение фотоэлектронного умножителя Б качестве чувствительнотю элемента электроннохх) компаса
8
L
фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитный компас | 1979 |
|
SU836521A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| О, и др | |||
| Пилотажные манометрические приборы, компасы и автоштурманы, М,, Оборонгиз, 1953, с | |||
| Прибор для корчевания пней | 1921 |
|
SU237A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
