Предлагаемое устройство относится к электротехнике и может быть использовано при построении устройств воспроизведения заданных движений на плоскости в локальных и мобильных робототехнических системах.
Известно устройство шагового перемещения, являющееся прототипом предлагаемого изобретения и содержащее установленные на каретке электромеханические модули, связанные с фиксаторами, обращенными своей активной поверхностью к направляющей, причем каждый электромеханический модуль содержит неподвижную и, по крайней мере, одну подвижную части, кинематически связанные между собой с возможностью поступательного перемещения подвижной части относительно неподвижной, при этом устройство содержит, по крайней мере, одну группу из двух пар взаимно перпендикулярно ориентированных в плоскости перемещений каретки упомянутых электромеханических модулей, причем модули каждой пары установлены один над другим, неподвижная часть одного (первого) из модулей каждой пары закреплена на каретке, на неподвижной части другого (второго) модуля в каждой паре закреплена подвижная часть первого модуля, а фиксатор установлен на подвижной части второго модуля.
Однако известное устройство имеет недостаточную жесткость конструкции, что приводит к снижению надежности работы устройства и точности воспроизведения перемещений и фиксации каретки в заданном положении на плоскости направляющей.
Целью изобретения является повышение надежности работы устройства и точности воспроизведения перемещений путем увеличения жесткости конструкции.
Поставленная цель достигается тем, что в устройство шагового перемещения, содержащее установленные на каретке электромеханические модули, связанные с фиксаторами, обращенными своей активной поверхностью к направляющей, причем каждый электромеханический модуль содержит неподвижную и, по крайней мере, одну подвижную части, кинематически связанные между собой с возможностью поступательного перемещения подвижной части относительно неподвижной, а также содержащее, по крайней мере, одну группу из двух пар взаимно перпендикулярно ориентированных в плоскости перемещений каретки упомянутых электромеханических модулей с неподвижными частями, закрепленными на каретке, дополнительно введены опорные части, каждая из которых выполнена в виде двух взаимно перпендикулярно ориентированных в плоскости перемещений каретки опорных элементов, соединенных между собой, причем подвижные части модулей кинематически связаны с опорными элементами соответствующей опорной части с возможностью поступательного перемещения их относительно опорных элементов в направлении, перпендикулярном направлению взаимного перемещения подвижных и неподвижных частей модулей в плоскости перемещений каретки, а фиксаторы установлены, по крайней мере, на опорных элементах.
Существенные отличия предлагаемого изобретения от известных технических решений заключаются в новой электромеханической схеме построения устройства шагового перемещения, которая реализуется с использованием опорных частей каретки, каждая из которых выполнена в виде двух взаимно перпендикулярно ориентированных в плоскости перемещений каретки опорных элементов, соединенных между собой, причем подвижные части модулей кинематически связаны с опорными элементами соответствующей опорной части с возможностью поступательного перемещения их относительно опорных элементов в направлении, перпендикулярном направлению взаимного перемещения подвижных и неподвижных частей модулей в плоскости перемещения каретки, а фиксаторы установлены, по крайней мере, на опорных элементах. При проведении патентных исследований подобных технических решений не было обнаружено ни в СССР, ни за рубежом.
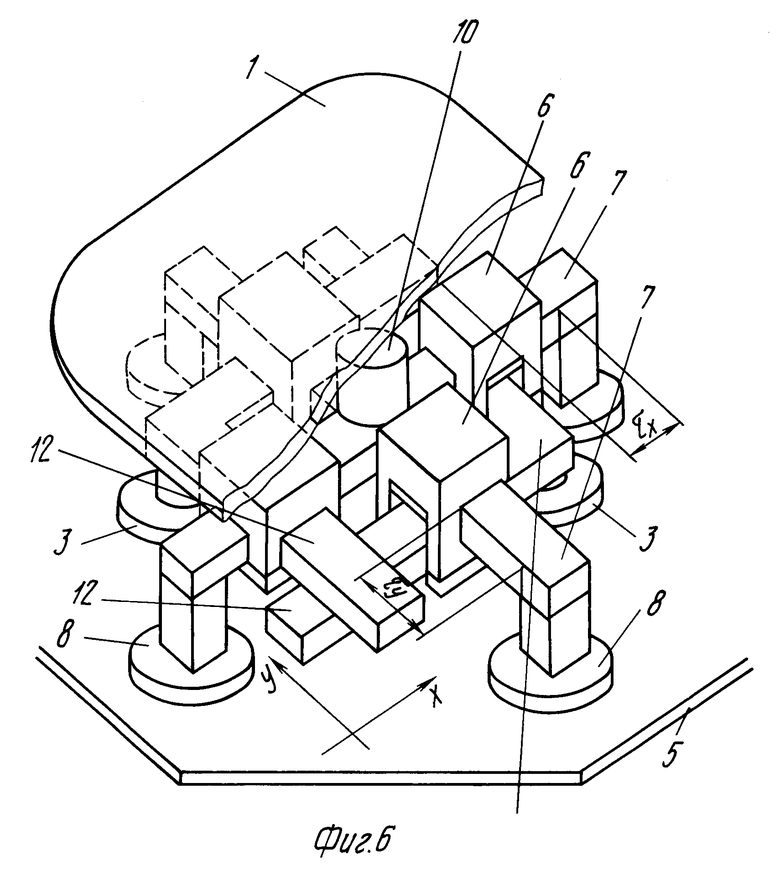
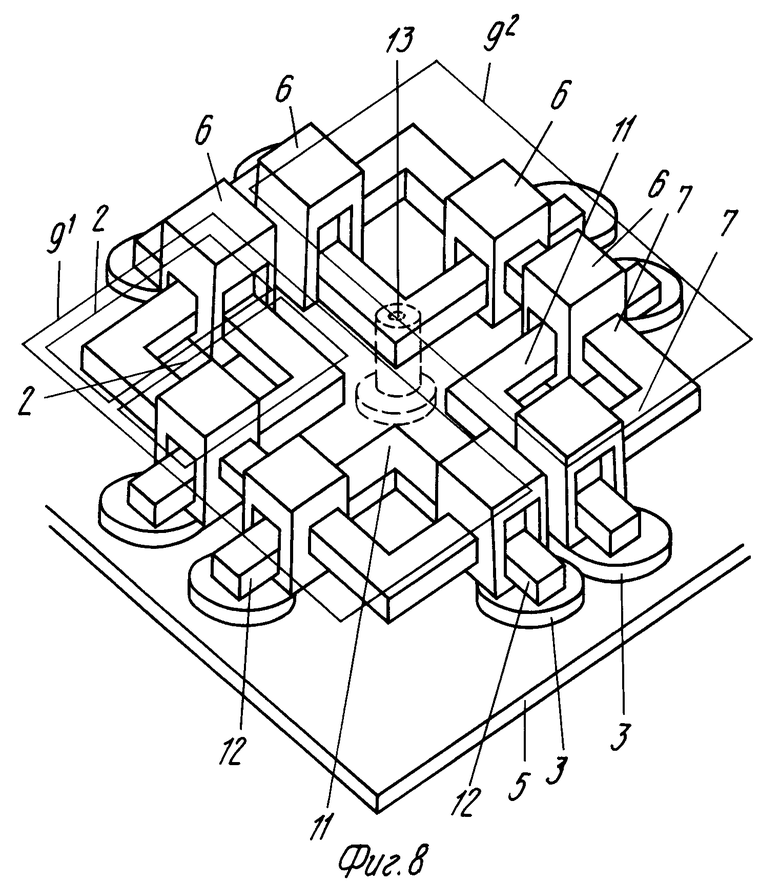
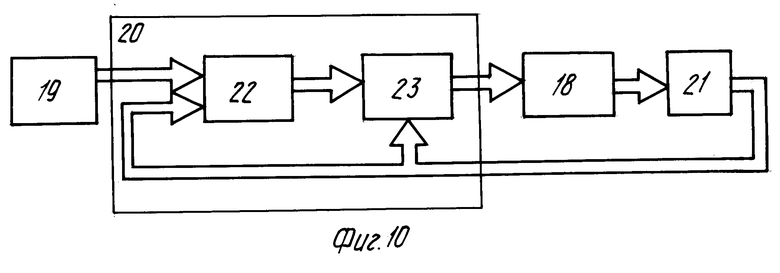
На фиг. 1 схематично изображено предлагаемое устройство шагового перемещения с электромеханическими модулями, выполненными в виде линейных шаговых двигателей; на фиг. 2 представлена электромеханическая схема устройства с модулями, выполненными в виде двигателей вращения с винтовой передачей; на фиг. 3 схематично изображен вариант выполнения электромагнитного фиксатора; на фиг. 4 представлены схемы предлагаемого устройства, поясняющие принцип его действия; на фиг. 5 приведена схема устройства, иллюстрирующая осуществление поворота каретки вокруг вертикальной оси; на фиг. 6 показано предлагаемое устройство, содержащее крестообразно соединенные между собой неподвижные части электромеханических модулей; на фиг. 7 показан вариант построения устройства с электромеханическими модулями, выполненными на основе линейных шаговых двигателей, причем две пары модулей, образующих одну группу, расположены на разных уровнях по вертикали; на фиг. 8 схематично изображено предлагаемое устройство, содержащее две группы попарно объединенных электромеханических модулей; на фиг. 9 представлена схема устройства, содержащего две группы электромеханических модулей, причем пары модулей, перемещающиеся в одинаковом направлении, жестко соединены между собой; на фиг. 10 представлена функциональная схема системы управления предлагаемым устройством.
Предлагаемое устройство содержит установленные на каретке 1 по взаимно перпендикулярным направлениям электроме- ханические модули 2, связанные с фиксаторами 3, обращенными своей активной поверхностью 4 к ферромагнитной направляющей 5, выполненной, например, в виде стальной плиты. Каждый электромеханический модуль 2 выполнен в виде подвижной 6 и неподвижной 7 кинематически связанных между собой частей с возможностью поступательного перемещения этих частей одна относительно другой. Максимальные перемещения, осуществляемые подвижными частями 6 электромеханических модулей 2 по двум взаимно перпендикулярным направлениям в пределах соответствующих электромеханических модулей 2 (шаговые перемещения τx и τy), зависят от длин и взаимного расположения неподвижных частей 7 модулей 2, принадлежащих различным группам. Возможность перемещения каретки 1 по плоскости ферромагнитной направляющей 5 обеспечивается использованием подходящих опор 8, например аэростатических (см. фиг. 6) или шаровых (см. фиг. 1). Пневмоподвод на фиг. 6 не показан. Устройство содержит также, по крайней мере, одну группу 9 из двух пар взаимно перпендикулярно ориентированных в плоскости перемещений каретки 1 электромеханических модулей 2 (см. фиг. 8), неподвижные части 7 модулей каждой пары закреплены на каретке 1 (например, посредством стоек 10), также взаимно перпендикулярно ориентированы в плоскости перемещений каретки 1 и жестко соединены между собой, подвижные части 6 модулей кинематически связаны с опорными частями 11 каретки 1, каждая из которых выполнена в виде двух взаимно перпендикулярно ориентированных в плоскости перемещений каретки 1 и соединенных между собой опорных элементов 12. При этом обеспечивается возможность поступательного перемещения подвижных частей 6 модулей 2 относительно опорных элементов 12 в направлении, перпендикулярном направлению взаимного перемещения подвижных 6 и неподвижных 7 частей модулей 2 в плоскости перемещений каретки 1. Фиксаторы 3, установленные на опорных элементах 12, также могут быть установлены и на каретке 1 (или на неподвижных частях 7 модулей, жестко связанных с кареткой 1, см. фиг. 5, 6). Для осуществления поворота (разворота) каретки на плоскости перемещения вокруг вертикальной оси фиксаторы могут быть связаны с кареткой 1 (неподвижными частями 7 модулей 2) или опорными элементами 12 посредством вертикальных шарниров 13.
В качестве электромеханических модулей в устройстве могут быть использованы готовые комплектующие узлы, например прецизионные линейные шаговые двигатели ЛШД (см. Афонин А.А. и др. Электромагнитный привод робототехнических систем. Киев, Наукова думка, 1986), двигатели вращения с винтовой или шарико-винтовой передачей (ШВП) реечной зубчатой передачей (см. Кузнецов В.Г. Приводы станков с программным управлением. М. Машиностроение 1983, с. 80 83, 122 124). В примере построения предлагаемого устройства с электромеханическими модулями на основе двигателей вращения с винтовой передачей (см. фиг. 2) условно неподвижной частью 7 модуля 2 является узел 14, содержащий двигатель с редуктором и приводной винт 15, а подвижной частью является гайка 6.
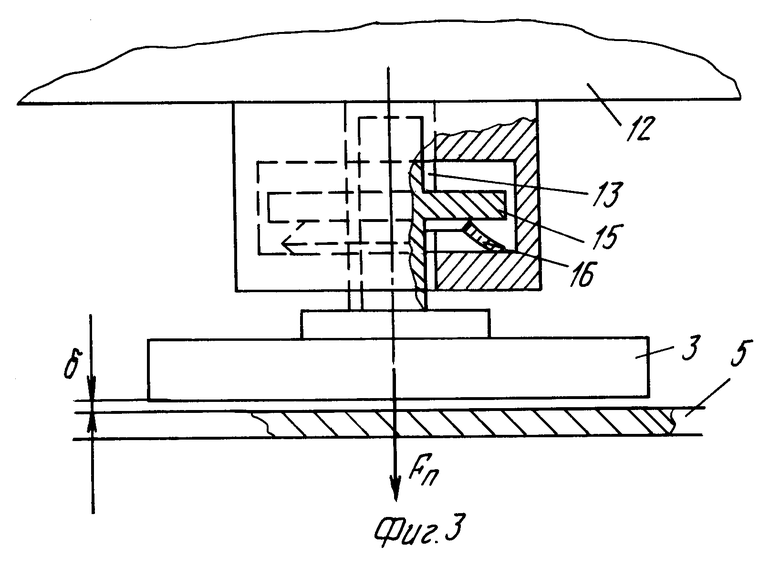
Фиксаторы 3 могут быть выполнены в виде клапанных электромагнитов (см. фиг. 3) или вакуумных схватов (см. справочник "Промышленные роботы/под ред. Ю. Г. Козырева. М. Машиностроение, 1983), В фиксаторе на фиг. 3 начальный воздушный зазор между активной поверхностью 4 его полюса и ферромагнитной направляющей 5 обеспечивается посредством тарельчатой пружины 15. Соединение электромагнитного фиксатора 3 с опорным элементом 12 осуществляется при помощи цилиндрического вертикального шарнира вращения 13, снабженного кольцевым выступом 16. Возможен вариант использования в качестве фиксаторов постоянных магнитов (магнитно-воздушных опор). Например, для осуществления перемещений по нижней поверхности ферромагнитной (магнитопроводящей) направляющей.
Для обеспечения синхронного перемещения подвижных частей 6 модулей 2 и опорных элементов 12 с электромагнитными (или вакуумными) фиксаторами 3 в устройстве, содержащем две группы 9 модулей (см. фиг. 8, 9), целесообразно в ряде случаев применения устройства жестко соединять между собой соответствующие опорные части 11 каретки 1 пластинами 17.
Система управления устройством шагового перемещения 18 содержит блок задания движения 19, подключенный к блоку управления 20, к выходам которого подсоединен также измерительный блок 21. Блок 20 в общем случае содержит последовательно соединенные вычислительное устройство 22 и собственно блок управления всеми узлами устройства шагового перемещения 23. Входы устройства 18 подключены к выходам блока 23, а его входы ко входам измерительного блока 21. Блок 23 содержит блоки управления электромеханическими модулями 2 и фиксаторами 3.
В качестве вычислительного устройства 22 могут использоваться известные микропроцессорные системы ЧПУ, например, система "Уникон", разработанная в Новосибирском электротехническом институте.
В состав измерительного блока 21 входят, например, датчики положения, скорости, ускорения, угла поворота каретки 1 (см. справочник по средствам автоматики (под ред. В.Э. Низэ и И.В. Антика. М. Энергоатомиздат, 1983).
Предлагаемое устройство работает следующим образом.
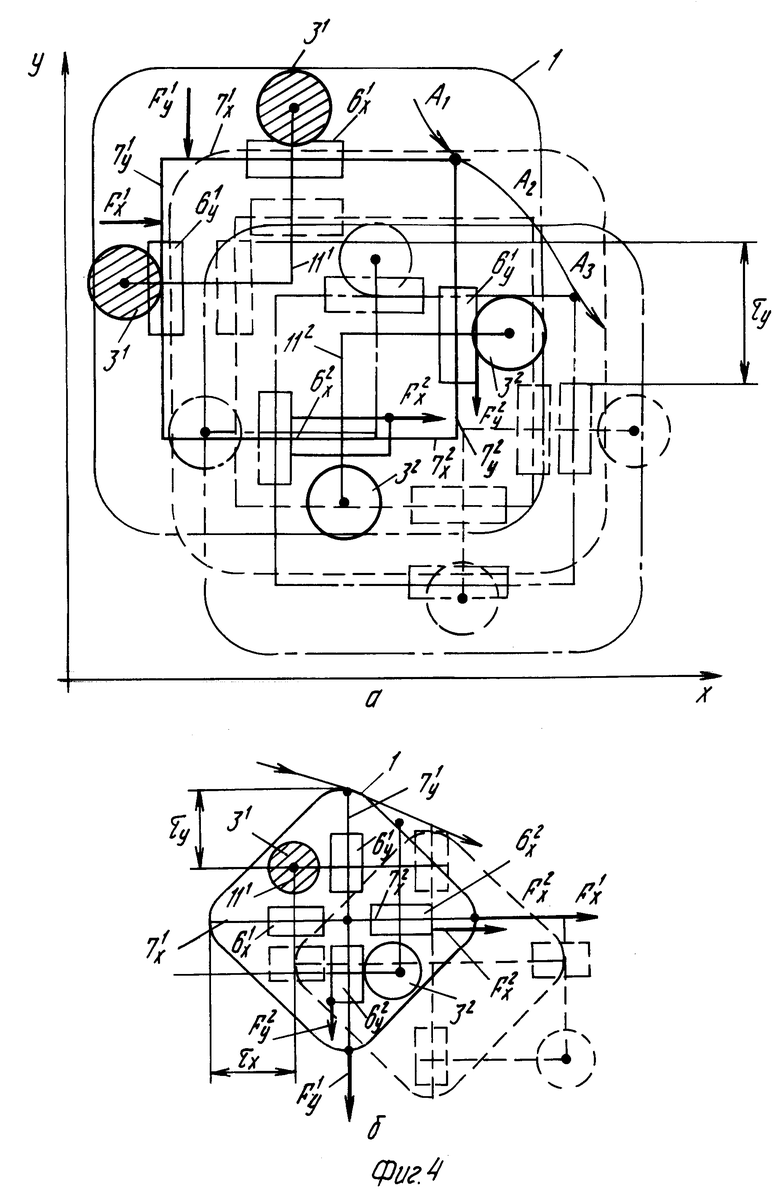
Пусть исходное положение устройства (см. фиг. 1) соответствует схеме, представленной на фиг. 4, а. В нужный момент блоки системы управления включаются и на вход блока 20 поступает задающий сигнал (например, соответствующий заданной траектории движения A1A2A3 на плоскости X, Y с заданными величинами ускорения разгона и скорости равномерного движения (или закона изменения скорости). Воздействие этого сигнала на вход устройства 22 в совокупности с сигналом с выхода блока 21 приводит к включению фиксаторов 31 и возникновению электромагнитного усилия притяжения Fп (см. фиг. 3), если фиксаторы электромагнитного типа. Это усилие обеспечивает надежную фиксацию опорной части 111 на поверхности ферромагнитной направляющей 5. Далее электромеханические модули с подвижными 6x1 и 6y1 и неподвижными 7x1 и 7y1 частями, выполненные в данном случае в виде ЛШД, формируют тяговые усилия Fx1 и Fy1, что приводит к перемещению неподвижных частей 7 модулей вместе с кареткой 1 относительно зафиксированной опорной части 31 в требуемом направлении в соответствии с заданной программой движения. В процессе перемещения частей 7x1 и 7y1 осуществляется одновременно перемещение подвижных частей 6x1 и 6y1 модулей вдоль соответствующих опорных элементов опорной части 31 в направлении, перпендикулярном соответствующим перемещениям подвижных частей относительно неподвижных, так как часть 6x1 является зафиксированной по координате Х, а часть 6y1 по координате Y. Одновременно с работой рассмотренных выше модулей модули другой пары формируют тяговые усилия Fx2 и Fy2, обеспечивающие соответствующие перемещения подвижных частей 6x2 и 6y2 относительно неподвижных 7x2 и 7y2 в направлениях, совпадающих с направлениями перемещений неподвижных частей 7х1, 7y1 относительно подвижных частей 6x1, 6y1. Иначе говоря, подвижные части правой пары модулей отслеживают в противофазе перемещения относительно каретки 1 подвижных частей левой пары модулей. В конце рассматриваемого интервала движения каретки 1 подвижная часть 6x1 находится в крайнем левом положении в плоскости каретки, а подвижная часть 6y1 в верхнем положении, а сама каретка попадает в точку A2. Подвижные части 6x2, 6y2 правой пары модулей при этом находятся соответственно в крайнем правом положении и в нижнем положении в плоскости каретки. В точке A2 включают фиксатор 32 и отключают фиксатор 31, обеспечивая надежную фиксацию опорной части 112 на плоскости ферромагнитной направляющей 5 и подвижных частей 6x2, 6y2 по координатам X и Y соответственно.
На следующем интервале движения каретки силовые тяговые усилия Fx2 и Fy2 формируют модули правой пары, а модули левой пары работают в следящем режиме аналогично рассмотренному выше. В конце данного интервала движения каретка попадает в точку A3.
Подобным образом работает и устройство, представленное на фиг. 6. Процесс перемещения каретки 1 и всех кинематически связанных узлов этого устройства иллюстрирует схема, изображенная на фиг. 4, б.
Непрерывность перемещения каретки 1 можно обеспечить различными способами управления модулями и фиксаторами. Например, осуществляя подготовительные перемещения неработающих фиксаторов с большей скоростью, чем рабочая скорость перемещения самой каретки, можно обеспечить работу фиксаторов в режиме наложения, т. е. реализовать алгоритм управления с одновременно включенными на некотором временном интервале фиксаторами 31 и 32.
Возможность поворота (разворота) на месте каретки 1 устройства иллюстрирует фиг. 5. Пусть устройство, выполненное по схеме, представленной на фиг. 1, находится в исходном положении, соответствующем фиг. 5. Это положение показано сплошными линиями. Фиксаторы 31, 32, 30 соединены соответственно с опорными частями 111, 112 и кареткой 1 посредством вертикальных цилиндрических шарниров 13 вращения (см. фиг. 3). Для осуществления поворота по часовой стрелке на угол ϕ1 сначала включают фиксаторы 31 и 30. В результате осуществляется надежная фиксация в точке О1 на плоскости направляющей 5 опорной части 111 и в точке О2 каретки 1 (соединение фиксатора 30 с кареткой 1 на фиг. 5,а не показано). Далее подачей соответствующих управляющих воздействий (см. фиг. 10) на входы устройства шагового перемещения (модули правой пары) обеспечивают формирование тяговых усилий Fx1 и Fy2. Это приводит к возникновению вращающего момента и повороту каретки 1 в направлении по часовой стрелке на угол ϕ1. В процессе работы правой пары модулей модули левой пары подачей соответствующих управляющих воздействий на них со стороны системы управления фиксируются в данном случае в исходном положении в плоскости каретки 1, и точка О3, соответствующая местоположению фиксатора 32 с шарниром 13, переходит в точку О4 в плоскости направляющей 5. Каретка 1, жестко связанная с неподвижными частями 7x1, 7y1, занимает новое положение, соответствующее точке B2 (показано штриховыми линиями на фиг. 5, а). Дальнейший поворот в том же направлении осуществляется аналогичным образом, и каретка 1 попадает в точку B3 (новое положение устройства показано штрихпунктирными линиями). В процессе перемещения (вращения) каретки 1 подвижные части 6x1, 6y1 перемещаются вдоль соответствующих неподвижных частей 7x1, 7y1 (так же, как при реализации поступательного перемещения каретки на плоскости, см. фиг. 4) и вдоль соответствующих опорных элементов опорной части 111 во взаимно перпендикулярных направлениях. После попадания каретки 1 в точку B3 для осуществления дальнейшего поворота необходимо сначала переключить фиксаторы 31, 32, поскольку подвижная часть 61 находится в крайнем положении на соответствующем опорном элементе опорной части 111. Следовательно, фиксация опорной части 112 осуществится при включенном узле 32 в точке О5. Возможна аналогично описанному выше организация скользящего режима работы модулей, не создающих силовые тяговые усилия, одновременно с работой модулей, формирующих тяговые усилия и вращающий момент требуемой величины.
Другой вариант реализации вращения каретки вокруг вертикальной оси иллюстрирует схема на фиг. 5, б, соответствующая чертежу предлагаемого устройства, представленного на фиг. 1. В данном случае отсутствуют фиксаторы, установленные на каретке. Для осуществления поворота каретки по часовой стрелке сначала включают фиксаторы 31, 32 и обеспечивают надежную фиксацию опорных частей 111, 112 на плоскости направляющей 5 (на чертеже не показана). Далее подачей соответствующих управляющих на модули левой и правой пар обеспечивают формирование тяговых воздействий Fx1, Fy1, Fx2, Fy2 и вращающий момент требуемой величины. Как видно из чертежа, в рассматриваемом варианте реализации поворота каретки положением вертикальной оси вращения в плоскости каретки можно варьировать, поскольку оно определяется взаимным расположением левой и правой пар электромеханических модулей (местоположением точек О1 и О2 на плоскости каретки). Из сказанного следует, что при управлении всей группой модулей можно осуществить поворот каретки и в процессе ее перемещения на плоскости по координатам X, Y. Все это обеспечивает расширение функциональных возможностей предлагаемого устройства и приводит к расширению области его применения.
Использование дополнительных опорных частей (элементов) в устройстве позволяет в сравнении с устройством-прототипом увеличить жесткость конструкции. В рассматриваемом устройстве независимо от сечения, габаритов (длины, ширины), массы неподвижной и подвижной частей электромеханического модуля можно всегда выбрать габариты (сечение, ширину, толщину) опорных элементов такими, чтобы обеспечивалась необходимая жесткость конструкции. В устройстве-прототипе жесткость конструкции зависит главным образом от длины и сечения (ширины, толщины) неподвижных частей электромеханических модулей. Кроме того, на опорных элементах можно разместить больше фиксаторов, чем в известном устройстве.
Таким образом, положительный эффект в предлагаемом устройстве в сравнении с прототипом проявляется в повышении жесткости конструкции за счет введения новых элементов с соответствующими связями, а следовательно, и в повышении точности воспроизведения заданных перемещений и надежности работы устройства шагового перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1981 |
|
SU1096093A1 |
| СПОСОБ ЗАПИСИ НА ПОВЕРХНОСТЬ МАСШТАБИРОВАННОЙ КОПИИ ИЗОБРАЖЕНИЯ-ОРИГИНАЛА | 1994 |
|
RU2074410C1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ЖИДКИХ ИЛИ ПАСТООБРАЗНЫХ ВЕЩЕСТВ НА ТВЕРДЫЕ ПОДЛОЖКИ И ЕГО МЕХАНИЗМ КАЛИБРОВКИ ЗАЗОРА РАКЕЛЬНОГО БЛОКА | 2003 |
|
RU2238153C1 |
| КОМБИНИРОВАННЫЙ ФОРМИРОВАТЕЛЬ-ПОЛЯРИЗАТОР ИЗЛУЧЕНИЯ (КФПИ) | 2001 |
|
RU2216688C2 |
| ГОРИЗОНТАЛЬНО-ДИСКОВЫЙ РАСПИЛОВОЧНЫЙ СТАНОК | 2002 |
|
RU2252863C2 |




Использование: в устройствах воспроизведения заданных движений на плоскости в локальных и мобильных робототехнических системах. Целью предлагаемого изобретения является повышение точности воспроизведения заданных движений каретки устройства путем обеспечения непрерывного ее перемещения на плоскости ферромагнитной направляющей. Другой целью предлагаемого изобретения является расширение функциональных возможностей устройства путем обеспечения поворота каретки вокруг вертикальной оси. Сущность изобретения: каждый установленный на каретке 1 электромеханический модуль 2 выполнен в виде одной неподвижной 7 и одной подвижной 6 кинематически связанных частей с возможностью поступательного перемещения одной части относительно другой. В устройство введены опорные части 11, каждая из которых выполнена в виде двух взаимно перпендикулярно ориентированных в плоскости перемещений каретки 1 и соединенных между собой опорных элементов 12. Причем устройство содержит, по крайней мере, одну группу из двух пар взаимно перпендикулярно ориентированных электромеханических модулей 2, неподвижные части 7 модулей 2 каждой пары закреплены на каретке 1, также взаимно перпендикулярно ориентированы и жестко соединены между собой, подвижные части 6 модулей 2 кинематически связаны с опорными элементами 12 соответствующей опорной части 11 с возможностью поступательного перемещения их относительно упомянутых элементов в направлении, перпендикулярном направлению взаимного перемещения подвижных 6 и неподвижных 7 частей модулей 2 в плоскости перемещений каретки 1, а на опорных элементах 12 установлены электромагнитные фиксаторы 3, обращенные своей активной поверхностью к ферромагнитной направляющей 5. Электромеханические модули 2 могут быть выполнены в виде линейных шаговых двигателей или двигателей вращения с винтовой передачей, двигателей вращения с зубчатой реечной передачей. 10 ил.
УСТРОЙСТВО ШАГОВОГО ПЕРЕМЕЩЕНИЯ, содержащее установленные на каретке электромеханические модули, связанные с фиксаторами, обращенными своей активной поверхностью к направляющей, причем каждый электромеханический модуль содержит неподвижную и по крайней мере одну подвижную части, кинематически связанные между собой с возможностью поступательного перемещения подвижной части относительно неподвижной, при этом содержащее по крайней мере одну группу из двух пар взаимно перпендикулярно ориентированных в плоскости перемещений каретки упомянутых электромеханических модулей, неподвижные части которых закреплены на каретке, отличающееся тем, что, с целью повышения надежности работы устройства и точности воспроизведения путем увеличения жесткости конструкции, в устройство дополнительно введены опорные части, каждая из которых выполнена в виде двух взаимно перпендикулярно ориентированных в плоскости перемещений каретки опорных элементов, соединенных между собой, причем подвижные части модулей кинематически связаны с опорными элементами соответствующей опорной части с возможностью поступательного перемещения их относительно опорных элементов в направлении, перпендикулярном направлению взаимного перемещения подвижных и неподвижных частей модулей в плоскости перемещений каретки, а фиксаторы установлены по крайней мере на опорных элементах.
| Авторское свидетельство СССР N 1834609, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
