Изобретение касается промышленных роботов, в частности, но не исключительно, предназначенных для перемещения обрабатываемых заготовок с одного пресса на другой на линии прессования.
Заявитель в течение продолжительного времени производит и поставляет на рынок промышленный робот, который может быть использован для вышеупомянутого применения и известен на рынке как робот "Inter press".
Техническим результатом данного изобретения является создание нового робота для использования в частности, но не исключительно, в качестве междупрессового робота, который имеет более простую и легкую конструкцию, быстрее работает и относительно экономичен в изготовлении.
Для достижения данного технического результата согласно изобретению предлагается промышленный робот, отличающийся тем, что включает в себя следующие элементы:
основание:
две руки, установленные на основании с возможностью поворота соответственно вокруг первой и второй оси, расположенных параллельно и на расстоянии друг от друга;
два узла двигателя с редукторами для обеспечения поворота рук;
два предплечья, соответственно сочлененных одними своими концами с руками по двум осям, параллельным упомянутым первой и второй осям, и сочлененных друг с другом на противоположных концах вокруг общей оси, параллельной первой и второй осям;
запястье робота, содержащее первый корпус, смонтированный на одной из рук с возможностью поворота вокруг третьей оси, параллельной первой и второй осям; еще один узел двигателя с редуктором для обеспечения поворота первого корпуса вокруг третьей оси; и второй корпус, установленный с возможностью смещения относительно первого корпуса по существу в направлении, параллельном третьей оси.
В предпочтительном варианте второй корпус соединен с первым корпусом за счет параллелограммного рычажного механизма, включающего четвертую ось, направленную перпендикулярно к третьей оси. Кроме того, на втором корпусе установлен фланец, который имеет возможность поворота вокруг пятой оси, перпендикулярной четвертой оси, причем для приведения в движение второго корпуса и фланца вокруг четвертой и пятой осей имеются два узла двигателей с редукторами.
Робот, выполненный согласно данному изобретению, отличается большей рабочей гибкостью, поскольку за счет регулирования положения и скорости двух рук можно достичь перемещения обрабатываемой заготовки, переносимой роботом (как обычно, с помощью захватывающего инструмента, подсоединенного к фланцу запястья робота), вдоль заданной траектории и по заданному закону перемещения. Возможно, например, достичь быстрого перемещения обрабатываемой заготовки с одного пресса на следующий пресс на линии прессования.
В то же время, конструкция предлагаемого робота намного проще, чем, например, конструкция междупрессового робота, выпускавшегося заявителем прежде ( см. упомянутый выше патент США). В частности, благодаря значительному уменьшению движущихся масс, конструкция робота может быть очень простой и легкой. Например, руки и предплечья могут иметь трубчатую конфигурацию, легкую и экономичную в изготовлении. В случае использования в качестве междупрессового робота, наличие пятой оси является факультативным, как это будет более наглядно продемонстрировано ниже.
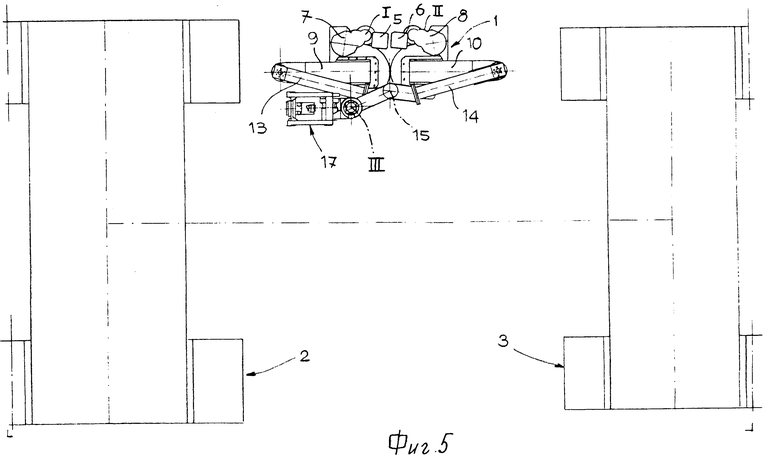
На фиг. 1 изображена схема предпочтительного варианта предлагаемого робота; на фиг. 2 то же, вид в плане; на фиг. 3, 4, 5 виды сверху трех разных рабочих состояний робота по фиг. 1.
На чертежах позицией 1 обозначено неподвижное основание, установленное на участке между двумя последовательными прессами 2 и 3 на линии прессования, например, для производства конструкций из листового металла для автомобилей. Каждая конструкция из листового металла передается последовательно с одного пресса на другой по линии прессования, чтобы подвергнуть их последовательно ряду операций, за счет которых получают продукцию заданной конфигурации. На участке, находящемся между каждой парой последовательно расположенных прессов 2 и 3 с одной стороны относительно оси 4, вдоль которой расположены прессы, располагается основание 1 робота согласно данному изобретению. На основании 1 установлено два электрических двигателя 5 и 6, которые обеспечивают посредством редукторных узлов 7 и 8 поворотное движение двух рук 9 и 10, установленных на основании 1 с возможностью поворота вокруг первой и второй осей 1 и 11, вертикальных в показанных примерах, которые параллельны и удалены друг и друга. Свободные концы рук двух 9 и 10 держат два предплечья 13 и 14 с возможностью поворота вокруг двух вертикальных осей 11 и 12. Концы двух предплечий 13 и 14, противоположные рукам 9 и 10, сочленены друг с другом по общей оси 15, параллельной осям I, II, 11 и 12. За счет описанной выше кинематической связи расположение двух предплечий 13 и 14 и, следовательно, оси 15 определяется исключительно положением двух рук 9 и 10.
Предплечье 14 имеет удлинение 16, которое жестко соединено с конструкцией предплечья 14 и выступает за ось 15. Свободный конец удлинения 16 держит запястье 17 с возможностью поворота вокруг оси III, параллельной осям I и II и соответствующей третьей степени свободы робота согласно данному изобретению.
Запястье 17 содержит первый корпус 18 (фиг. 2), который смонтирован с возможностью поворота вокруг оси III на удлинении 16 предплечья 14 и снабжен двигателем и редукторным узлом 19 для обеспечения поворота вокруг оси III.
Запястье 17 также содержит второй корпус 20, соединенный с корпусом 18 посредством параллелограммного рычажного механизма, включающего в себя две пары рычагов 21, расположенных в двух вертикальных плоскостях с обеих сторон оси удлинения 16. Верхний рычаг 21 каждой пары рычагов 21, расположенных на каждой стороне данной оси, сочленен с корпусом 18 по четвертой оси IV, направленной перпендикулярно оси III. В качестве альтернативы, нижний рычаг 21 в одной из двух пар рычагов может быть исключен, в то время как два верхних рычага 21 могут быть объединены в единую раму.
И, наконец, согласно следующему предпочтительному (хотя и не существенному) признаку, корпус 20 держит фланец 22 с возможностью поворота вокруг оси V, перпендикулярной оси IV. Позициями 23 и 24 соответственно обозначены два узла двигателей с редукторами, которые управляют поворотами вокруг осей IV и V.
В настоящем описании и на прилагаемых чертежах не показаны детали конструкции электрических двигателей и редукторных узлов, которые управляют поворотом вокруг осей I, II, III, IV и V робота, поскольку эти элементы могут быть любого известного типа и не подпадают, как таковые, под объем данного изобретения. Более того, исключение этих деталей из чертежей, обеспечивает лучшее понимание последних.
Согласно известной технологии, фланец 22 служит для того, чтобы держать захватывающий элемент, например, снабженный чашечными присосами, который позволяет захватывать обрабатываемую заготовку из листового металла, передавать ее и укладывать.
Как ясно показано в следующем ниже описании, в работе поворот вокруг осей I и II регулируется таким образом, чтобы необходимое движение достигалось осью III по заданной траектории, с тем чтобы перенести деталь 26 (фиг. 3-5) с пресса 2 на следующий пресс 3. Во время этого перемещения поворот вокруг оси III регулируется таким образом, чтобы обеспечить необходимую ориентацию заготовки 26, когда она загружается на следующий пресс. Поворот вокруг оси IV регулируется таким образом, чтобы обеспечить перемещение заготовки в практически вертикальном направлении, когда ее захватывают с предшествующего пресса 2 и когда ее разгружают на последующий пресс 3 (при направлении движения детали вдоль линии прессования). И, наконец, поворот вокруг оси V регулируется таким образом, чтобы обеспечить небольшие наклоны или полное переворачивание обрабатываемой заготовки вокруг горизонтальной оси в зависимости от потребностей некоторых конкретных применений.
На фиг. 3 и 4 показан робот в конфигурации, соответствующей промежуточному положению обрабатываемой заготовки 26 во время ее перемещения с пресса 2 на пресс 3 и положение окончательной разгрузки заготовки 26 на пресс 3.
На фиг. 5 показан робот в положении покоя с минимальным габаритом.
Как уже указывалось, руки 9 и 10 и предплечья 13 и 14 могут иметь относительно легкую трубчатую конструкцию, поскольку, в отличие от междупрессового робота, известного из упомянутого патента США, движущиеся массы относительно уменьшены, что дает возможность упростить конструкцию и повысить скорость работы.
Согласно следующему признаку можно снабдить руки 9 и 10 и/или предплечья 13 и 14 конструкцией, регулируемой по длине, которая может управляться, например, системами винтов и гаек, чтобы еще больше увеличить рабочую гибкость робота.
Установка двух рук 9 и 10 с возможностью поворота вокруг двух вертикальных осей I, II, удаленных друг от друга, позволяет держать соответствующие редукторные узлы отдельно, что способствует повышению прочности и надежности данной конструкции.
Конечно, при условии сохранения принципа изобретения можно вносить разнообразные изменения в детали конструктивного выполнения изобретения и его варианты, которые были описаны и проиллюстрированы исключительно в качестве примера, не выходя за рамки объема данного изобретения.



Изобретение относится к станкостроению. Промышленный робот предназначен для применения в качестве междупрессового робота, содержит две руки, установленные с возможностью поворота вокруг двух осей, расположенных параллельно и на расстоянии друг от друга, с которыми сочленены два предплечья. Противоположные концы предплечий сочленены друг с другом по общей оси, и одно из этих предплечий связано с запястьем с возможностью его поворота вокруг третьей оси, параллельной первой и второй осям. 3 3 з.п. ф-лы, 5 ил.
| Патент США N 4661040, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

