Настоящее изобретение относится к роботу-манипулятору для промышленных производственных линий, содержащему:
- поддерживающую структуру;
- первую руку робота, установленную в подвешенном состоянии на поддерживающей структуре и содержащую множество тел, расположенных последовательно и выполненных с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг соответствующих осей вращения;
- вторую руку робота, установленную в подвешенном состоянии на поддерживающей структуре и содержащую множество тел, расположенных последовательно и выполненных с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг соответствующих осей вращения; и
- первое и второе средства для установки, соответственно, первой и второй рук на поддерживающей структуре,
в котором ось вращения первого поворотного тела первой руки, которое является ближайшим из множества тел к поддерживающей структуре, определяет первое направление и в котором ось вращения первого поворотного тела второй руки, которое является ближайшим из множества тел к поддерживающей структуре, определяет второе направление.
Робот-манипулятор указанного типа описан, например, в международной заявке на патент WO № 2007/037130.
Целью настоящего изобретения является усовершенствование вышеописанной конструкции путем создания робота-манипулятора, в котором первая и вторая руки выполнены с возможностью взаимодействия друг с другом более эффективно и гибко.
Указанная выше цель достигается с помощью манипулятора, обладающего отличительными признаками, изложенными в пункте 1 формулы изобретения.
Формула является неотъемлемой частью описания настоящего изобретения.
Далее следует более подробное описание неограничивающего примера настоящего изобретения со ссылками на приложенные чертежи, на которых:
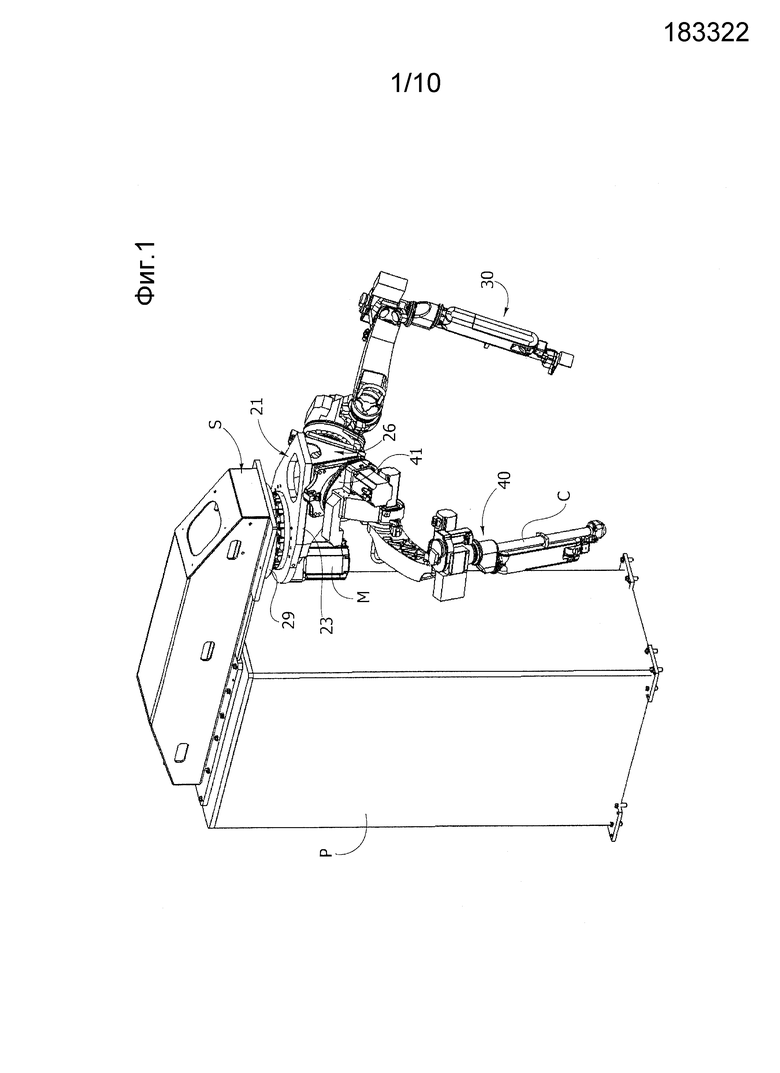
Фиг.1 - схематический вид рабочей зоны, оборудованной роботом-манипулятором описываемого типа.
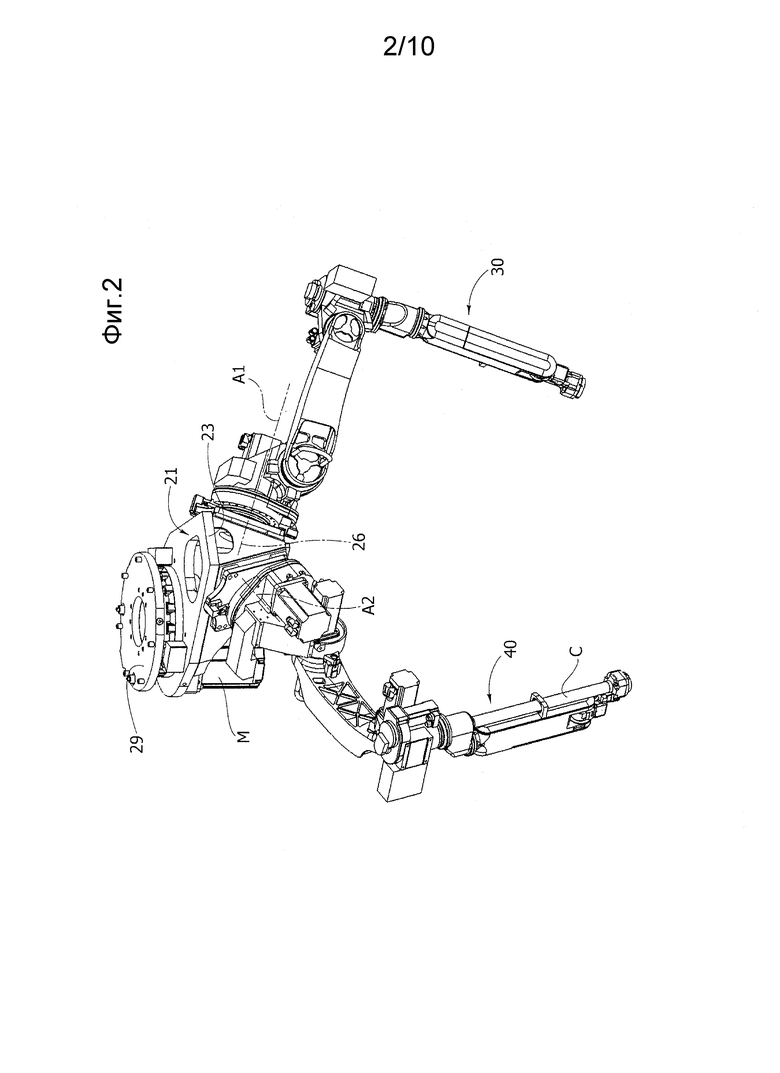
Фиг.2 - вид в перспективе робота-манипулятора по настоящему изобретению.
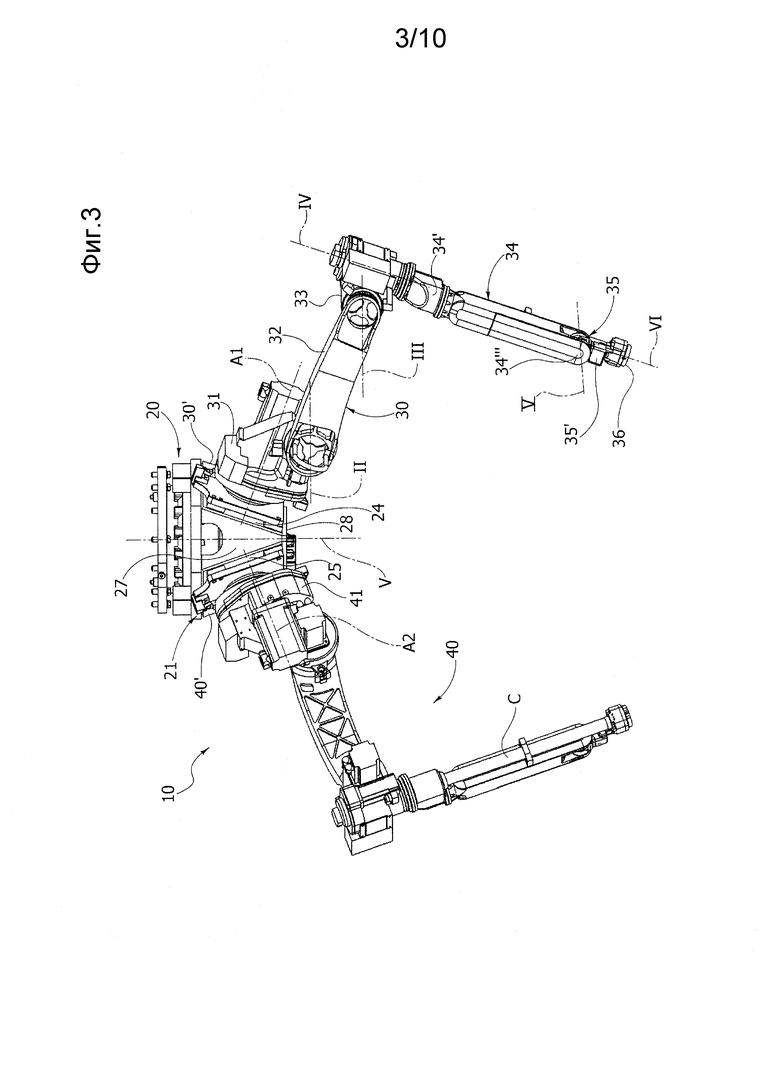
Фиг.3 - вид спереди робота-манипулятора по фиг.2.
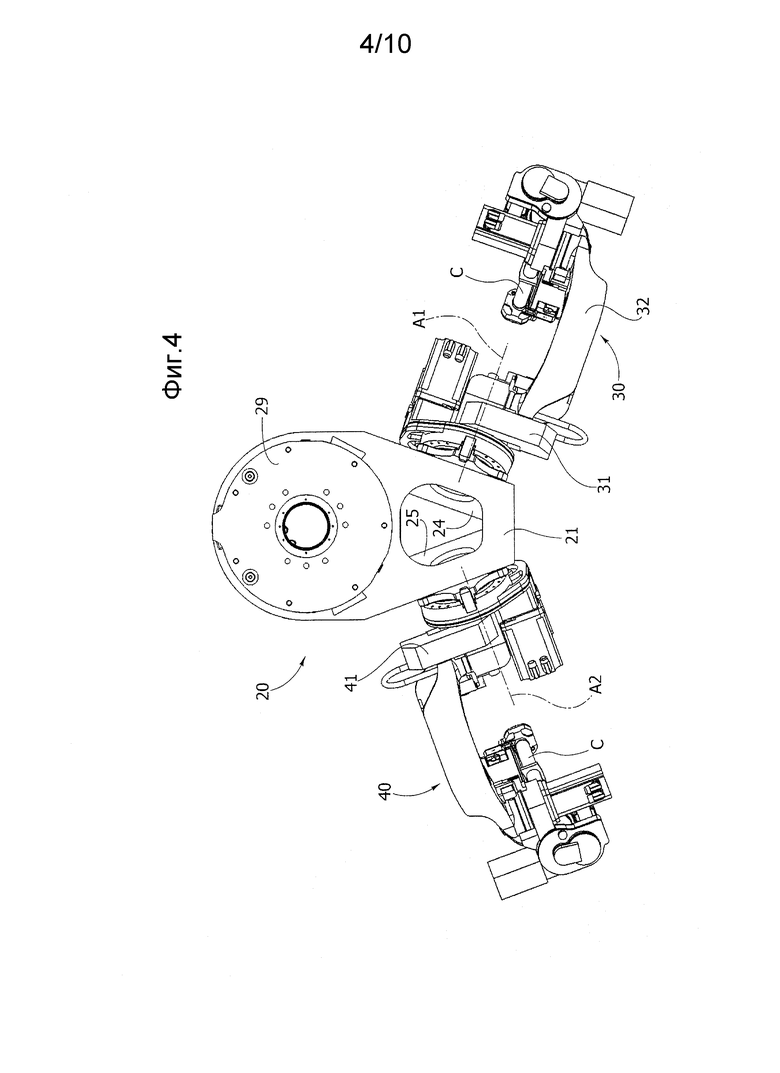
Фиг.4 - вид сверху робота-манипулятора по фиг.2.
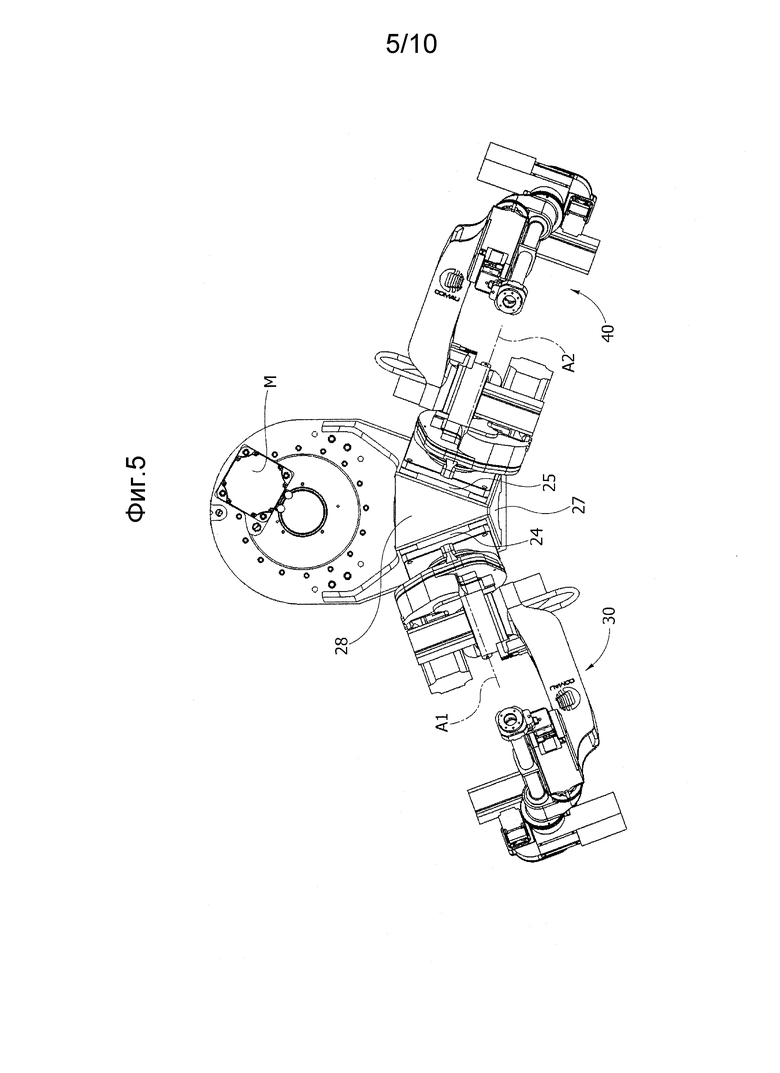
Фиг.5 - вид снизу робота-манипулятора по фиг.2.
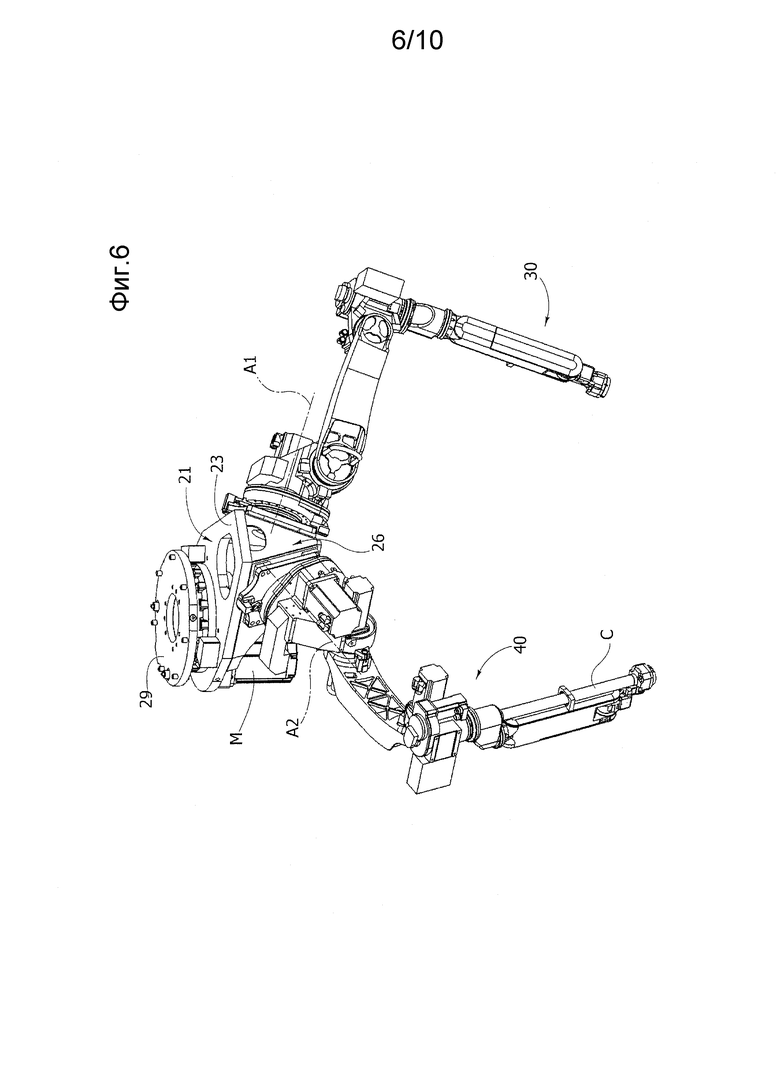
Фиг.6 - вид в перспективе другого варианта робота-манипулятора по настоящему изобретению.
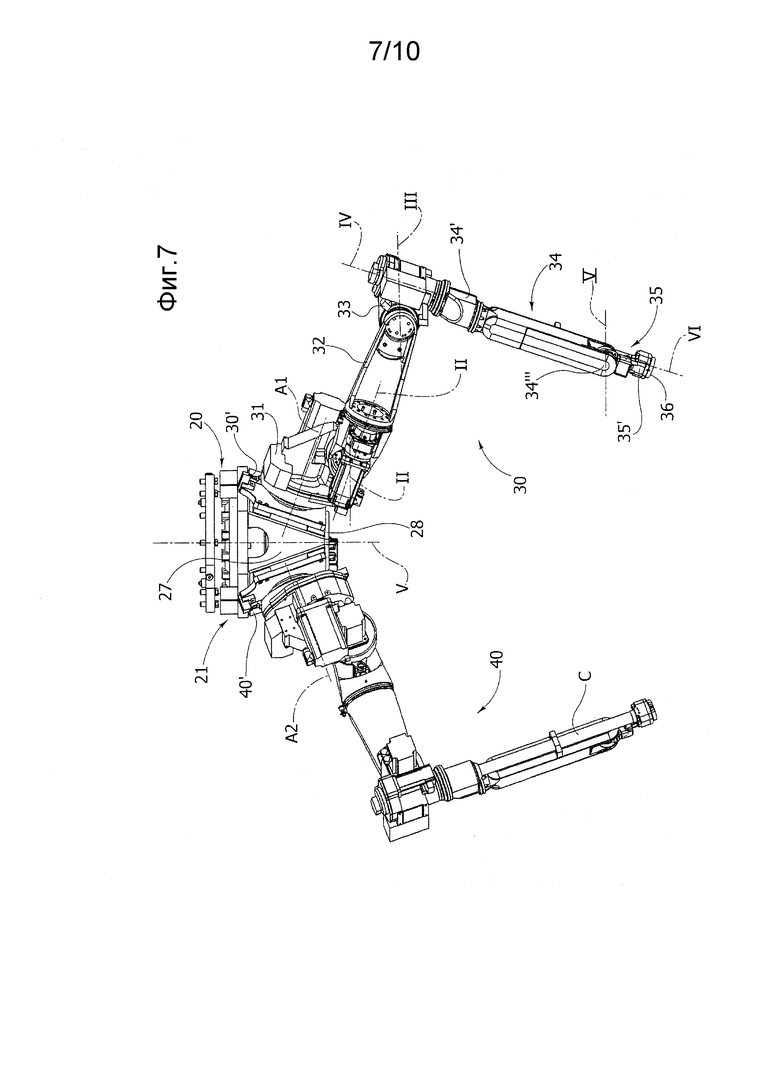
Фиг.7 - вид спереди робота-манипулятора по фиг.6.
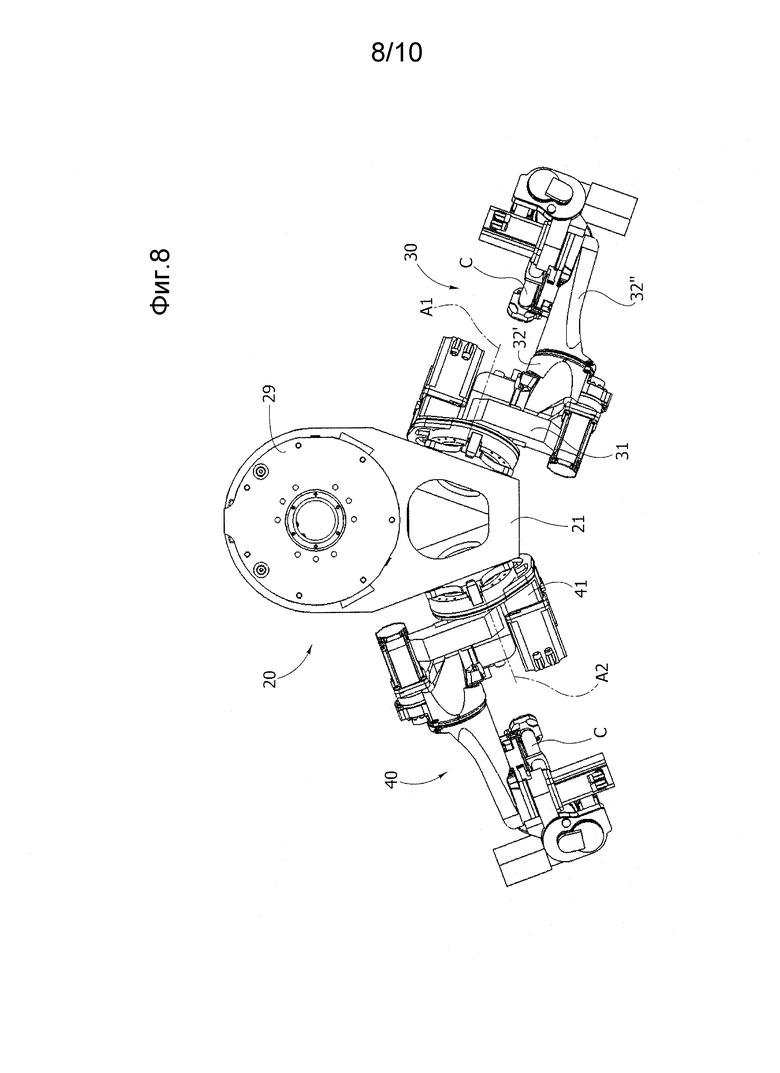
Фиг.8 - вид сверху робота-манипулятора по фиг.6.
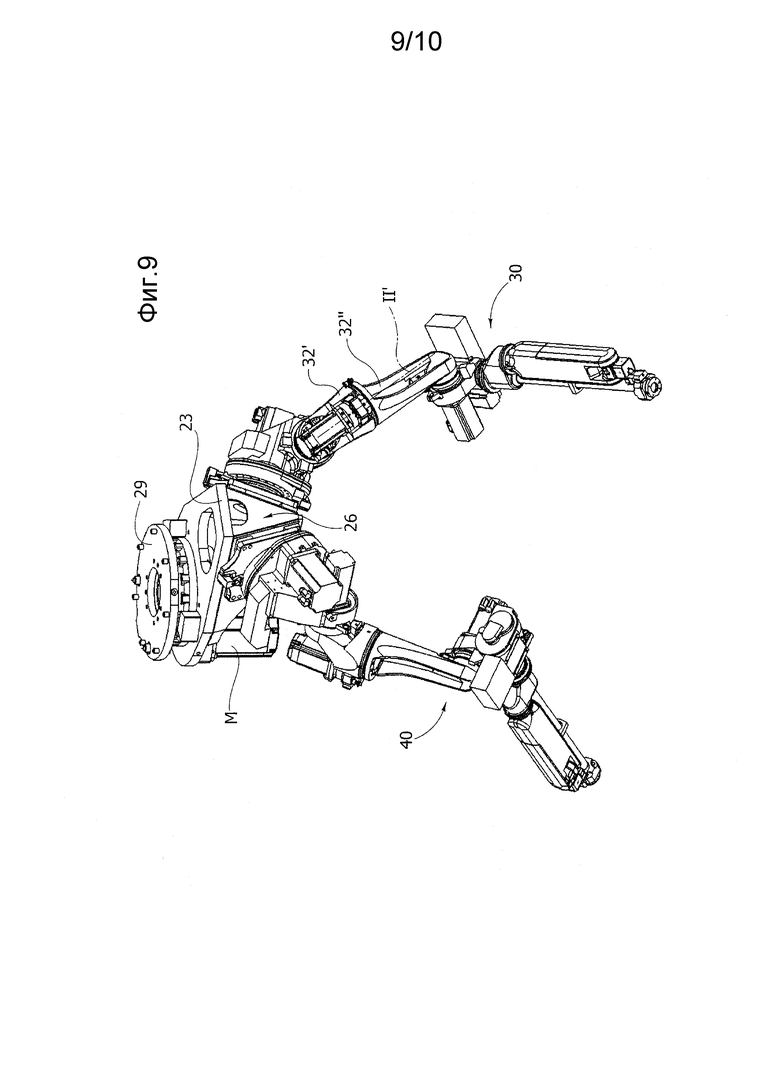
Фиг.9 - вид в перспективе робота-манипулятора по фиг.6 в рабочей конфигурации, и
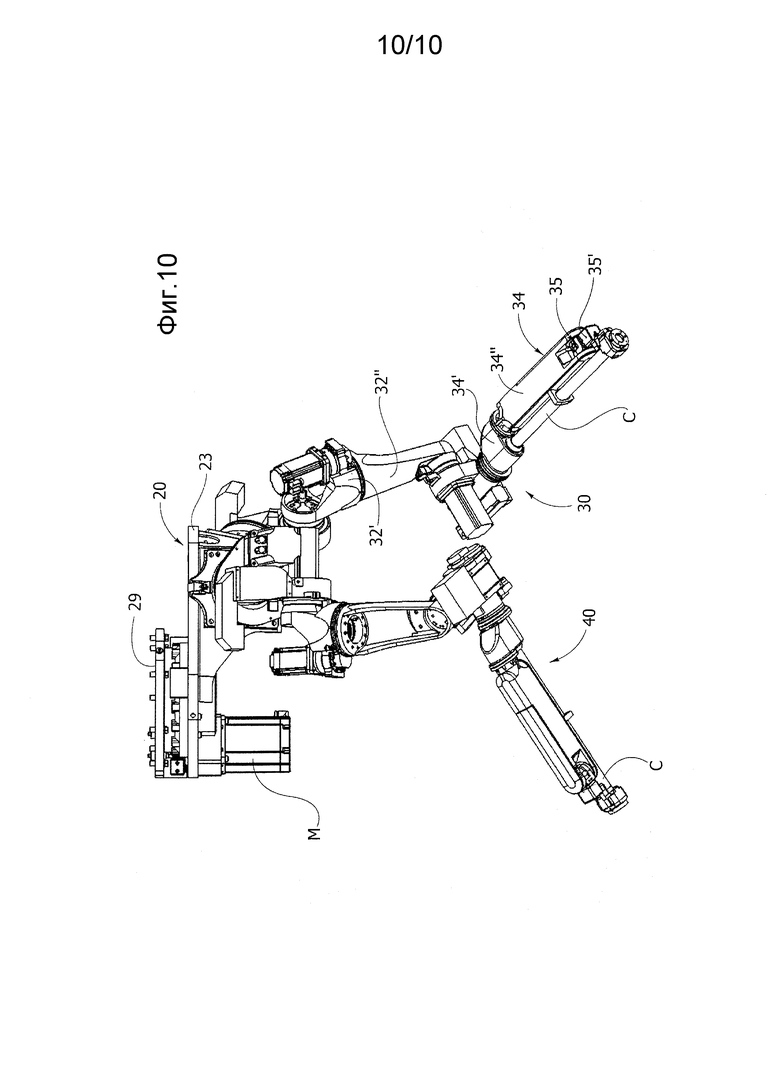
Фиг.10 - вид сбоку робота-манипулятора по фиг.9.
В нижеследующем описании проиллюстрированы различные детали, предназначенные для облегчения понимания вариантов настоящего изобретения. Эти варианты могут быть созданы без одной или более конкретных деталей или с помощью других способов, компонентов или материалов и т.д. В других случаях известные конструкции, материалы или операции не показаны или не описаны, чтобы избежать усложнения описания различных вариантов.
Ссылочные позиции в настоящем описании применяются лишь для удобства и, следовательно, не определяют объем защиты или объем изобретения.
На чертежах позицией 10 обозначен робот-манипулятор, предназначенный для работы в промышленных производственных линиях, например в линиях по производству автомобилей.
Робот 10 содержит поддерживающую структуру 20, а также первую руку 30 и вторую руку 40, установленные на поддерживающей структуре. Как показано на чертежах, в описываемом роботе-манипуляторе поддерживающая структура выполнена так, чтобы удерживать руки подвешенными над рабочей зоной, для работы в которой предназначен этот робот-манипулятор. В конкретном показанном примере поддерживающая структура прикреплена к консольному участку S колонны Р, установленной в положении, соответствующем рабочей зоне. Эта поддерживающая структура альтернативно может быть закреплена на консоли S, которая проходит над рабочей зоной.
Две руки робота, установленные на поддерживающей структуре, заранее расположены с возможностью взаимодействия друг с другом при выполнении одной или более из заданных операций на одной или более обрабатываемых деталях. Управляющее средство оперативно соединено с роботом-манипулятором для управления двумя руками, а также дополнительными рабочими узлами робота 10 в соответствии с заранее заданными командами, связанными с каждой операцией. Например, это управляющее средство может находиться в колонне Р.
Каждая рука содержит множество тел, установленных последовательно и выполненных с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг оси вращения. Каждая рука далее содержит базовый участок 30', 40', предназначенный для крепления к поддерживающей структуре и предназначенный для удержания последовательности вращающихся тел соответствующих рук.
Структура рук будет подробно описана ниже. В любом случае следует отметить, что тип рук, которые используются в этом роботе-манипуляторе, сам по себе не важен и не образует обладающих новизной отличительных признаков робота-манипулятора по настоящему изобретению.
В описываемом роботе-манипуляторе предусмотрено специально применяемое средство для крепления двух рук на поддерживающей структуре в конкретной ориентации в пространстве.
В частности, это средство спроектировано так, чтобы ориентировать поворотное тело первой руки 30, которое является ближайшим к поддерживающей структуре (на чертежах показано позицией 31), в положение, при котором его соответствующая ось вращения проходит в первом направлении А1, и, аналогично, чтобы ориентировать поворотное тело второй руки 40, которое является ближайшим к поддерживающей структуре (на чертежах показано позицией 41), в положение, при котором его соответствующая ось вращения проходит во втором направлении А2, отличающемся от первого направления. Это средство выполнено так, что первое и второе направления наклонены вниз и расходятся друг от друга.
В предпочтительном варианте первое и второе направления наклонены относительно горизонтальной плоскости на угол от 0° до 90°, за исключением крайних значений. Кроме того, в предпочтительных вариантах первое и второе направления определяют между собой угол от 90° до 180°, за исключением крайних значений. Предпочтительно, первое и второе направления симметричны друг другу относительно промежуточной вертикальной геометрической плоскости.
Ориентация двух рук, описанная выше, представляет инновационную конфигурацию по сравнению с известными конфигурациями. Следует отметить, что от наклона первого поворотного тела рук зависит конфигурация, которую руки принимают, чтобы войти в различные рабочие положения в пространстве, и, в связи с этим, заявитель обнаружил, что конкретная конфигурация, описываемая в настоящем документе, дает рукам больше возможностей и модальностей координированного вмешательства с учетом одного и того же количества пространства для их движения. Как будет понятно из нижеследующего описания, вышеописанные и другие преимущества будут еще более выражены в том случае, когда каждая рука содержит по меньшей мере шесть поворотных тел, два из которых предпочтительно являются удлиненными.
Средство для установки двух рук в ориентации, описанной выше, может иметь любую конструкцию, пригодную для этой цели. Это средство содержит намеренно созданные участки, которые благодаря их конкретной конфигурации определяют такую ориентацию и которые могут быть созданы на поддерживающей структуре или, альтернативно, на участке основания самих рук.
Далее следует описание особенно преимущественного варианта поддерживающей структуры и средства для крепления рук на этой структуре.
В различных вариантах, как и в показанном, поддерживающая структура содержит платформу 21, на которой установлены две руки 30, 40.
В различных вариантах, как и в показанном, платформа 21 установлена с возможностью поворота вокруг вертикальной оси V на фиксированной части поддерживающей структуры. В предпочтительных вариантах, как и в показанном, эта платформа имеет плиту 22, которая установлена так, чтобы иметь возможность поворота вокруг вертикальной оси, проходящей в положении, соответствующем ее соединительному участку, и от этого соединительного участка отходит выступ 23, на котором в соответствующих положениях установлены две руки робота-манипулятора, расположенные консольно относительно вертикальной оси.
В различных вариантах, как и в показанном, поддерживающая структура далее содержит фланец 29 для крепления этой структуры к стенке консоли, например, как указано выше, к консольной структуре, установленной в положении, соответствующем рабочей зоне. Кроме того, на той же структуре установлен привод или двигатель М для поворота платформы.
В различных вариантах, как и в показанном, платформа 21 имеет первую плоскую и наклонную стенку 24, на которой закреплено основание 30' первой руки, и вторую плоскую и наклонную стенку 25, на которой закреплено основание 40' второй руки. Эти стенки наклонены так, что соответствующие геометрические оси, ортогональные им, определяют указанные выше первое и второе направления. Очевидно, что в этом случае именно конкретная конфигурация структуры, на которой установлены руки, определяет конкретную ориентацию этих рук, и, следовательно, основание или крепежный участок самих рук может относиться к любому типу из обычно применяемых в этой области. Например, этот участок может иметь фланец, который может крепиться к стенкам болтами или эквивалентными крепежными средствами.
В различных вариантах, как и в показанном, первая и вторая стенки определены наклонными сторонами структуры 26 полукорпуса, прикрепленной к дну платформы. Эта структура полукорпуса имеет переднюю сторону 27, имеющую по существу форму треугольника или перевернутой трапеции, и сторону 28 основания, которая также имеет форму треугольника или трапеции и проходит по существу параллельно плите и ортогонально передней стороне и которая опирается на переднюю сторону так, чтобы поворачивать ее вершину или дистальное малое основание (т.е. удаленное от вертикальной оси вращения платформы) к нижней вершине или большому основанию передней стороны. Эти стороны соединяют вышеуказанные противоположные наклонные стороны друг с другом. Следует отметить, что благодаря конкретной описанной выше конфигурации требуемый наклон первой и второй стенок можно задать с высокой точностью просто благодаря соответствующей конструкции этих треугольных (или трапецеидальных) сторон.
В целом конфигурация, описанная выше, позволяет получить структуру платформы, к которой крепятся руки робота, являющуюся прочной и, в то же время, простой и, следовательно, хорошо подходящей для применения там, где предполагается поворот платформы вокруг вертикальной оси V. Кроме того, благодаря тому факту, что структура платформы за счет наклонных стенок сама определяет требуемую ориентацию рук, можно использовать и обычные руки роботов, например, относящиеся к типу, который допускает установку в перевернутом положении относительно показанного (как проиллюстрированные руки) так, чтобы их основание лежало в горизонтальной плоскости. Следовательно, преимущества, которые такая конструкция дает в отношении гибкости производственной линии и управления магазином инструментов, очевидны.
Как уже упоминалось выше, конкретный тип рук робота не важен для основных отличительных признаков робота-манипулятора по настоящему изобретению, которые относятся к конкретной ориентации этих рук в пространстве. Однако, как указано выше, заявитель обнаружил, что применение, в рамках предложенного решения, рук робота, каждая из которых имеет по меньшей мере шесть тел, имеющих возможность вращаться относительно друг друга, и два из которых предпочтительно являются удлиненными и установлены на расстоянии друг от друга через по меньшей мере одно из других тел последовательности, позволяет создать универсальный робот-манипулятор, способный работать в широком диапазоне модальностей. В различных вариантах, как и в показанном, удлиненные тела, упомянутые выше, имеют длину, по меньшей мере в полтора раза превышающую длину остальных тел последовательности.
Далее следует общее описание особо предпочтительного типа руки робота, первый конкретный вариант которого показан на фиг.2-5, а на фиг.6-10 показан второй конкретный вариант этого типа руки. Для удобства описания будут даваться ссылки на первую руку 30, принимая во внимание тот факт, что в вариантах, показанных на чертежах, первая и вторая руки идентичны.
Как показано на фиг.2-5, начиная с участка 30' основания, прикрепленного к поддерживающей структуре, рука робота содержит первое поворотное тело 31, которое прикреплено к основанию и ось вращения которого (представляющая первую ось вращения руки робота), как было указано выше, проходит в первом направлении А1. Предпочтительно, на первом теле установлен и двигатель, который предназначен для привода его во вращение, и двигатель, предназначенный для приведения во вращение второго тела 32 руки робота. Альтернативно, двигатель, предназначенный для приведения во вращение первого тела 31, может быть установлен на участке 30' основания. Второе тело 32 установлено на первом теле так, чтобы оно могло поворачиваться вокруг второй оси II, по существу ортогональной оси вращения первого тела (и, следовательно, первому направлению). Второе тело имеет удлиненную форму и одним концом соединено с возможностью вращения с первым телом, а противоположным концом соединено с третьим телом 33 так, что оно может поворачиваться вокруг третьей оси III вращения, проходящей по существу параллельно второй оси II. На третьем теле, в свою очередь, установлено четвертое тело 34 так, что оно имеет возможность вращаться вокруг четвертой оси IV вращения, по существу ортогональной третьей оси III. Предпочтительно, на третьем теле установлен двигатель, предназначенный для приведения во вращение четвертого тела. Следует отметить, что четвертое тело имеет удлиненную форму и соединено одним концом с третьим телом, а на противоположном его конце установлено пятое тело 35 с возможностью вращения вокруг пятой оси V, по существу ортогональной четвертой оси IV. Наконец, на пятом теле 35 установлено шестое тело 36 с возможностью вращения вокруг шестой оси VI, по существу ортогональной пятой оси V. Предпочтительно, на четвертом теле установлены двигатели, предназначенные для приведение во вращения пятого и шестого тел. Как видно на чертежах, второе и четвертое тела 32, 34 предпочтительно имеют длину, по меньшей мере в полтора раза превышающую длину других вращающихся тел последовательности.
Следует отметить, что в настоящем описании состояние ортогональности между двумя осями или прямыми может относиться и к прямым или осям, инцидентным и перпендикулярным друг другу, и к прямым или осям, неинцидентным относительно друг друга, но проекции которых в одной и той же плоскости параллельны с угла приблизительно 90° относительно друг друга.
В конкретном варианте по фиг.6-10 второе тело 32 руки, показанной на фиг.1-5, заменено двумя участками 32' и 32", которые могут поворачиваться относительно друг друга вокруг оси II' вращения, по существу ортогональной осям II и III. В частности, участок 32' установлен на первом теле 30 с возможностью вращения вокруг оси II, и, кроме того, на нем установлен двигатель, предназначенный для приведения во вращение участка 32", тогда как последний является удлиненным, и на нем с возможностью поворота вокруг оси III установлено третье тело 34. Благодаря описанной конфигурации руки 30 и 40 робота, показанные на фиг.5-9, содержат семь осей вращения, что дает им большую маневренность и повышенные рабочие возможности. Фиг.8 и 9 иллюстрируют конфигурацию рук 30 и 40, полученную на основе конфигурации по фиг.5-7 в результате вращения соответствующих участков 32" вокруг осей II'.
Со ссылками на два конкретных варианта рук робота, описанных выше, следует отметить, что их соответствующие четвертые, пятые и шестые тела 34, 35, 36 совместно образуют запястье робота, которое отличается тем, что содержит канал С для кабелей и/или труб для подачи инструмента (не показан) и управления им, при этом инструмент устанавливается в шестое тело 36 руки робота, которое на одном конце по существу совпадает с четвертой осью вращения, а на противоположном конце по существу совпадает с шестой осью вращения. Таким образом, кабели и/или трубы расположены внутри габаритов, определенных структурой соответствующего запястья робота, что устраняет риск попадания одной руки робота в кабели на другой руке робота. Вновь следует отметить, что четвертое тело 34 содержит по существу участок 34' локтя, в основании которого имеется первое отверстие (на чертеже не показано), которое обращено к пятому телу 35 и к шестому телу 36. Это первое отверстие по существу соосно с четвертой осью IV. Кроме того, участок 34' локтя содержит невыровненный участок 34", который по существу проходит вдоль и на расстоянии от оси указанного выше отверстия и на нем с возможностью вращения вокруг пятой оси V установлено пятое тело 35. Пятое тело 35 имеет консольный участок 35', в котором выполнено второе отверстие (не показано), по существу соосное с шестой осью VI. В состоянии, когда робот установлен и налажен, сквозь первое и второе отверстия проходят кабели и/или трубы С. Боковой участок 34" четвертого тела 34 на противоположном относительно локтя 34' конце имеет вилочный участок 34'''. Вилочный участок 34''' проходит вдоль и на расстоянии от оси отверстия в локте, и на нем установлено пятое тело 35 с возможностью поворота вокруг пятой оси V.
Конкретный тип руки робота, описанный выше, является особенно преимущественным ввиду его компактной структуры, которая позволяет рукам робота-манипулятора работать в таких положениях, когда они расположены близко друг к другу.
Наконец, следует отметить, что, несмотря на то, что в настоящем описании упоминается робот-манипулятор с двумя руками одного типа, следует понимать, что при необходимости можно использовать и руки разных типов.
Детали конструкции и варианты настоящего изобретения могут существенно изменяться относительно показанных в описании, в рамках принципов настоящего изобретения и без выхода за пределы объема настоящего изобретения, определенного приложенной формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2558023C9 |
| АГРЕГАТ ДЛЯ ЖИВОТНОВОДСТВА | 2011 |
|
RU2563680C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ | 2020 |
|
RU2728086C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Станок для шлифования деталей | 1987 |
|
SU1713426A3 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
Изобретение относится к роботу-манипулятору для промышленных производственных линий, содержащему поддерживающую структуру (20), первую (30) и вторую (40) руки робота, первое и второе средства для установки, соответственно, первой и второй рук на поддерживающей структуре. Первая (30) и вторая (40) руки установлены в подвешенном состоянии на поддерживающей структуре и содержат поворотные тела, расположенные последовательно и выполненные с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг соответствующих осей вращения. При этом ось вращения первого поворотного тела первой руки, которое является ближайшим из указанных тел к поддерживающей структуре, определяет первое направление (А1), и ось вращения первого поворотного тела второй руки, которое является ближайшим из множества тел к поддерживающей структуре, определяет второе направление (А2). Причем первое и второе средства выполнены с возможностью ориентирования, соответственно, первого поворотного тела первой руки и первого поворотного тела второй руки с обеспечением наклонения вниз первого и второго направления и их расхождения друг от друга. Изобретение обеспечивает эффективное и гибкое взаимодействие первой и второй рук. 10 з.п. ф-лы, 10 ил.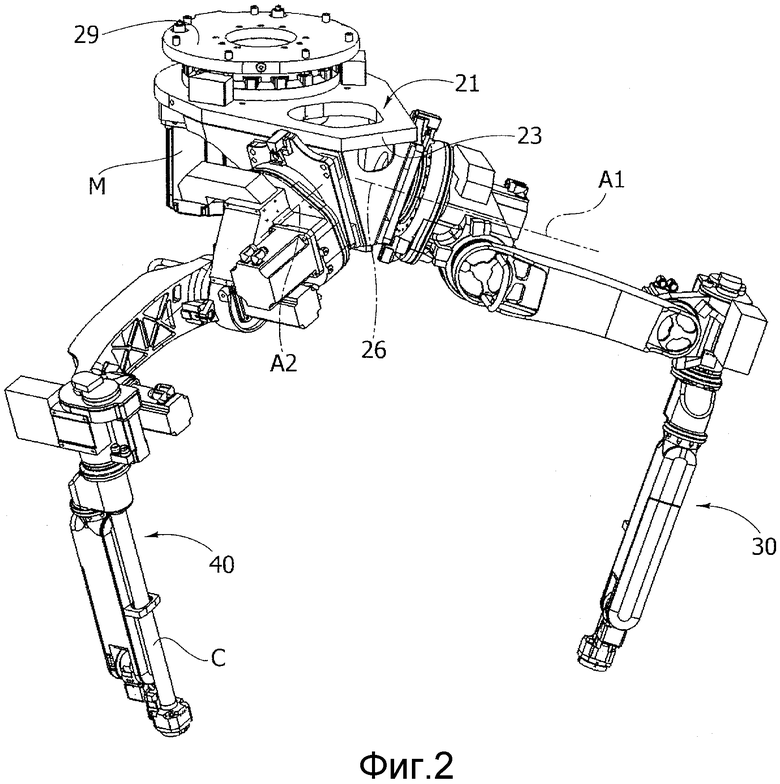
1. Робот-манипулятор для промышленных производственных линий, содержащий:
- поддерживающую структуру (20);
- первую руку (30) робота, установленную в подвешенном состоянии на поддерживающей структуре и содержащую поворотные тела, расположенные последовательно и выполненные с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг соответствующих осей вращения;
- вторую руку (40) робота, установленную в подвешенном состоянии на поддерживающей структуре и содержащую поворотные тела, расположенные последовательно и выполненные с возможностью вращения относительно друг друга и относительно поддерживающей структуры вокруг соответствующих осей вращения; и
- первое и второе средства для установки, соответственно, первой и второй рук на поддерживающей структуре,
в котором ось вращения первого поворотного тела первой руки, которое является ближайшим из указанных тел к поддерживающей структуре, определяет первое направление (А1), и в котором ось вращения первого поворотного тела второй руки, которое является ближайшим из указанных тел к поддерживающей структуре, определяет второе направление (А2),
отличающийся тем, что первое и второе средства выполнены с возможностью ориентирования, соответственно, первого поворотного тела первой руки и первого поворотного тела второй руки с обеспечением наклонения вниз первого и второго направления и их расхождения друг от друга.
2. Робот-манипулятор по п. 1, в котором поддерживающая структура содержит вращающуюся платформу (21), выполненную с возможностью поворота вокруг вертикальной оси (V) вращения, на которой установлены первая и вторая руки.
3. Робот-манипулятор по п. 2, в котором первая и вторая руки установлены на платформе в соответствующем положении консольно относительно оси вращения платформы.
4. Робот-манипулятор по любому из предшествующих пунктов, в котором первое и второе средства выполнены так, что первое и второе направления наклонены относительно горизонтальной плоскости на угол от более 0° до менее 90°.
5. Робот-манипулятор по п. 2, в котором платформа имеет первую наклонную стенку (24) первого средства, на которой закреплен участок (30′) основания первой руки, который несет множество поворотных тел первой руки, и вторую наклонную стенку (25) второго средства, на которой закреплен участок (40′) основания второй руки, который несет множество поворотных тел второй руки, при этом первая и вторая стенки наклонены так, чтобы соответствующие геометрические оси, ортогональные им, определяли первое и второе направления.
6. Робот-манипулятор по п. 2, в котором платформа имеет снизу полукорпус (26), определяющий первую и вторую стенки.
7. Робот-манипулятор по п. 1, в котором первое и второе средства выполнены так, что первое и второе направления симметричны друг другу относительно промежуточной вертикальной геометрической плоскости.
8. Робот-манипулятор по п. 1, в котором каждая из первой и второй рук содержит по меньшей мере шесть поворотных тел, установленных последовательно относительно друг друга и выполненных с возможностью поворота вокруг такого же количества осей вращения.
9. Робот-манипулятор по п. 1, в котором два поворотных тела каждой из первой и второй рук имеют длину, по меньшей мере в полтора раза большую, чем длина каждого из остальных поворотных тел соответствующей последовательности.
10. Робот-манипулятор по п. 9, в котором между двумя более длинными телами установлено по меньшей мере одно из остальных тел последовательности.
11. Робот-манипулятор по п. 1, в котором первое и второе средства выполнены так, что первое и второе направления определяют между собой угол от более 90° до менее 180°.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 4762455 A, 09.08.1988 | |||
| РОБОТ-МАНИПУЛЯТОР ДЛЯ ПОКРАСКИ ИЗДЕЛИЙ | 2003 |
|
RU2263020C2 |

