Изобретение относится к области измерительной техники и предназначено для поиска кабельной линий с током, утерянных трубопроводов и буров в геологических скважинах, обнаружения дефектов печатных плат, поиска намагниченных предметов в теле человека, для обнаружения скрытого оружия на контрольных пунктах и т.д.
Известен градиентометр (пат. США, N 4068164, 1978), состоящий из двух кольцевых феррозондов (магниточувствительных датчиков), расположенных на жестком немагнитном основании, блока электроники, включающего узел генератора переменной ЭДС и усилитель-преобразователь с регулировкой нуля, подключенного к выходам упомянутых датчиков, и регистрирующий прибор, подключенный к выходу блока электроники, с которого поступает сигнал, пропорциональный разности проекций векторов магнитной индукции, измеренный датчиками и преобразованный усилителем-преобразователем в форму удобную для регистрации.
Известным градиентометром невозможно обнаружить полезный сигнал, созданный близлежащим от датчиков источником магнитного поля, когда этот сигнал равен или меньше сигнала, созданного дальним источником (дальними источниками) поля, например, металлическими конструкциями в помещении или на улице, городским, воздушным, железнодорожным транспортом, высоковольтной линией электропередачи и т. д.
Известен градиентометр (авт. св. N 1659942, БИ N 24, 1991), который по совокупности существенных признаков наиболее близок предлагаемому и принят за прототип. Известное устройство состоит из первого, второго, третьего и четвертого магниточувствительных преобразователей (датчиков), помещенных на жестком немагнитном основании последовательно вдоль одной оси, четырех усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, а выходы подключены к соответствующим входам этих датчиков, генератор переменной ЭДС, выходы которого подключены ко вторым входам датчиков и усилительно-преобразовательных блоков, двух включенных последовательно и встречно градиентных обмоток, каждая из которых расположена на одном из наиболее удаленных друг от друга датчиков (на одном из крайних датчиков), двух включенных последовательно и согласно дополнительных обмоток (обмоток компенсации), каждая из которых расположена на одном из крайних датчиков, двух блоков вычитания, одного блока сложения и регистрирующего прибора, при этом выходы усилительно-преобразовательных блоков крайних датчиков подключены ко входам второго блока вычитания, выход которого подключен к регистрирующему прибору, выходы усилительно-преобразовательных блоков двух средних датчиков подключены ко входам блока сложения и входам первого блока вычитания, выходы которого подключены к встречно включенным градиентам обмоткам, а выходы блока сложения подключены к последовательно включенным обмоткам компенсации.
Известное устройство работает следующим образом.
На вторые входы четырех магниточувствительных датчиков подается с генератора переменной ЭДС возбуждающее напряжение. В результате этого на выходе каждого датчика появляется ЭДС второй гармоники, пропорциональная значению составляющей вектора магнитной индукции, воздействующей на соответствующий датчик. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, а затем подаются на первые входы соответствующих датчиков, обеспечивая отрицательную обратную связь по измеряемым составляющим векторов магнитной индукции. Выходные сигналы с усилительно-преобразовательных блоков, подключенных к средним датчикам, поступают на выходы первого блока вычитания и блока сложения. С выхода первого блока вычетания сигнал, пропорциональный измеряемый пространственной производной магнитной индукции, созданной наиболее удаленными источниками магнитного поля помехи и магнитным полем близлежащего источника полезного сигнала, поступает на градиентные обмотки, осуществляя в крайних датчиках полную компенсацию неоднородности магнитного поля от наиболее удаленного и частичную компенсацию от близлежащего источника магнитного поля. Выходной сигнал с блока сложения, пропорциональный однородному магнитному полю, поступает на обмотки компенсацию поля в крайних датчиках. Тем самым осуществляется компенсация составляющих внешнего однородного магнитного поля в крайних датчиках. Выходные сигналы с выходов усилительно-преобразовательных блоков крайних датчиков, пропорциональные составляющим векторов магнитной индукции, созданной близлежащим источником магнитного поля, поступает на второй блок вычитания, выходной сигнал с которого, пропорциональный неоднородности магнитного поля близлежащего источника поля, поступает на регистрирующий прибор.
Однако известные устройство (авт.св. N 1659942, БИ N 24, 1991) отличается сложностью конструкции и достаточно значительным потреблением мощности. Переносимые человеком градиентометры, в частности, предназначенные для обнаружения скрытого оружия или обнаружения попавших в тело человека ферромагнитных предметов имеют автономное питание, например, электрические батареи, аккумуляторы. Следовательно, снижение потребляемой мощности, упрощение конструкции, а, значит, и снижение веса, габаритов таких градиентометров является задачей актуальной.
Задачей предлагаемого изобретения является создание градиентометра, отличающегося от прототипа (авт.св. N 1659942, БИ N 24, 1991) более простой конструкцией и меньшим потреблением мощности, но обеспечивающего, как и прототип, обнаружение неоднородности магнитного поля, созданного близлежащим источником поля на фоне неоднородности магнитного поля наиболее удаленных, но существенно более интенсивных сторонних источников магнитного поля. Поставленная задача решается за счет компенсации однородного магнитного поля, измеренного одним датчиком в местах расположения двух других датчиков, компенсации неоднородности магнитного поля, созданной источниками магнитного поля помехи наиболее удаленными от этих трех датчиков, и в частичной компенсацией неоднородности магнитного поля близлежащего источника, измеренного вторым датчиком, в месте расположения третьего датчика.
Предлагаемый градиентометр, содержащий первый, второй и третий магниточувствительные датчики с коллинеарно ориентированными осями, помещенные на жестком немагнитном основании последовательно вдоль одной оси основания, первый, второй и третий усилительно-преобразовательные блоки, первые входы которых подключены к выходам соответствующих датчиков, генератор переменной ЭДС, выходы которого подключены ко входам магниточувствительных датчиков и ко вторым входам усилительно-преобразовательных блоков, две обмотки компенсации, одна из которых охватывает первый, а вторая третий магниточувствительные датчики, и регистрирующий прибор, снабжен третьей обмоткой компенсации, охватывающей второй магниточувствительный датчик, один вывод которой подключен к одному выводу первой обмотки компенсации, а второй вывод подключен к одному выводу второй обмотки компенсации, выход первого усилительно-преобразовательного блока подключен ко второму выводу первой обмотки компенсации, выход второго усилительно-преобразовательного блока подключен к общему контакту второй и третьей обмоток компенсации, второй вывод второй обмотки компенсации подключен к общему контакту градиентометра.
В предлагаемом градиентометре по сравнению с прототипом (авт.св. N 1659942, БИ N 24, 1991) добавлена только одна обмотка компенсации, но исключены: один датчик, усилительно-преобразовательный блок, два блока вычитания, один блок сложения и две градиентные обмотки, т.е. количество блоков, датчиков и обмоток в совокупности уменьшилось на 35 что упростило конструкцию градиентометра. Основная мощность в градиентометре, в частности, феррозондовом градиентометре расходуется на перемагничивание магниточувствительных элементов датчиков (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с. 127-139). Применение в предлагаемом градиентометре только трех датчиков, а также только трех усилительно-преобразовательных блоков, трех последовательно соединенных обмоток компенсации, генератора переменной ЭДС и регистрирующего прибора позволило снизить потребляемую мощность примерно на 30% по сравнению с техническим решением принятым за прототип (авт.св. N 1659942, БИ N 24, 1991). Кроме того, предлагаемый градиентометр, как и известное техническое решение (авт.св. N 1659942, БИ N 24, 1991) обеспечивает обнаружение неоднородности магнитного поля близлежащего от датчиков источника поля на фоне неоднородности магнитного поля наиболее удаленных от этих датчиков, но более интенсивных источников магнитного поля. Это осуществляется благодаря компенсации магнитного поля, измеренного одним крайним (первым) датчиком, в местах расположения двух других (второго и третьего) датчиков, компенсации неоднородности магнитного поля, созданного источниками магнитного поля помехи наиболее удаленными от этих трех датчиков, и источников, и частичной компенсации неоднородности магнитного поля близлежащего источника, измеренного вторым датчиком, в месте расположения третьего датчика. Т.е. предлагаемый градиентометр решает ту же самую задачу, что и прототип, но более простыми средствами и меньшими затратами мощности. Действительно неоднородность магнитной индукции наиболее удаленных источников магнитного поля от датчиков градиентометра носит линейный характер между первым и вторым, первым и третьим датчиками. При этом за наиболее удаленный источник магнитного поля принимают тот источник, расстояние от которого до каждого из датчиков удовлетворяет требуемой погрешности определения пространственной производительной индукции между крайними (первым и третьим) датчиками. Так, например, при расстоянии от источника магнитного поля до каждого из трех датчиков не менее 3l13, l13 расстояние между крайними датчиками, погрешность определения пространственной производной по измеренной разности магнитной индукции между крайними датчиками уже не превышает 5% (Тамберг Ю.Г. Оценка погрешности дипольного приближения для двух разнополярных источников. Л. "Труды ВHИИЭП", N 2(6), 1969, с.168-173). Таким образом, при наличии внешнего однородного магнитного поля, например магнитного поля Земли, и существенно удаленного от каждого из трех датчиков источника поля разность векторов магнитной индукции между первым и третьим датчиками равна разности векторов магнитной индукции между первым и вторым датчиками, умноженной на отношение l13/l12, l12- расстояние между первым и вторым датчиками.
При наличии близлежащего источника неоднородности магнитной индукции от первого или третьего датчика разность магнитной индукции между первым и вторым датчиками носит линейный характер и пропорциональна пространственной производной. Разность же магнитной индукции между первым и третьим датчиками, расстояние между которыми больше чем расстояние между первым и вторым датчиками, носит нелинейный характер и не пропорциональна пространственной производной. При этом за близлежащий источник магнитного поля принимают тот, от которого расстояние до одного из датчиков не превышает 3l13 и выбирается в зависимости от требуемой точности измерения разностей магнитной индукции первым и третьим датчиками от удаленности и интенсивности предполагаемых сторонних источников магнитного поля. При наличии близлежащего источника магнитного поля разность магнитной индукции между первым и третьим датчиками B4, равная B31 B3 B1, где B1 и B3 значения магнитной индукции, измеренные соответственно первым и третьим датчиками. С учетом компенсирующего поля, равного разности магнитной индукции B21 B2 B1, где B2 значение магнитной индукции, измеренное вторым датчиком, умноженной на отношение l13/l12, где l12 расстояние между первым и вторым датчиком, B4 будет иметь значение, которое можно представить в виде следующего выражения
B4 B31-B21•l13/l12.
Для этого в месте расположения третьего датчика воспроизводится магнитная индукция, равная значению -B21•l13/l12, обеспечивающая компенсацию магнитной индукции, созданной наиболее удаленным источником магнитного поля и частичную компенсацию магнитной индукции, созданной близлежащим источником поля. Сигнал, пропорциональный магнитной индукции -B21•l13/l12, подается с выхода второго усилительно-преобразовательного блока и поступает в обмотку компенсации третьего датчика, которая воспроизводит в месте расположения этого датчика магнитную индукцию -B21•l13/l12. В таком случае сигнал с выхода третьего датчика, поступающий на третий усилительно преобразовательный блок, пропорционален магнитной индукции, созданной только близлежащим источником магнитного поля.
Таким образом, технический результат предлагаемого градиентометра выражается в упрощении конструкции и уменьшении потребляемой мощности при обеспечении обнаруженная неоднородности магнитного поля, созданного близлежащим источником магнитного поля на фоне неоднородности магнитного поля наиболее удаленных, но существенно более интенсивных сторонних источников магнитного поля.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На чертеже изображена структурная схема градиентометра.
Предлагаемый градиентометр состоит из трех однокомпонентных магниточувствительных датчиков 1-3 с коллинеарно ориентированными осями, трех усилительно-преобразовательных блока 4-6, первые входы которых подключены к выходам соответствующих датчиков 1-3, генератора переменной ЭДС 7, выходы которого подключены ко входам датчиков 1-3 и вторым входам блоков 4-6, трех обмоток компенсации 8-10, каждая из которых охватывает соответствующий датчик 1-3, регистрирующий прибор 11, подключенный к выходу блока 6, и жесткого немагнитного основания 12, на котором помещены датчики 1-3 с обмоткой компенсации 8-10 последовательно вдоль одной оси LN, при этом один вывод обмотки 8 подключен к одному выводу обмотки 9, второй вывод обмотки 9 подключен к выходу блока 5 и к одному выводу обмотки 10, второй вывод обмотки 10 подключен к общему контакту градиентометра, а второй вывод обмотки 8 подключен к выходу блока 4.
Предполагаемый градиентометр работает следующим образом.
На входы датчиков 1-3 подается с генератора 7 напряжение, возбуждающее эти датчики. В результате этого на выходе каждого датчика 1-3 появляется ЭДС второй гармоники, пропорциональная проекции вектора магнитной индукции на магнитную ось соответствующего датчика (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с.66). Выходные сигналы с датчиков 1-3 усиливаются и детектируются в соответствующих блоках 4-6. Для детектирования сигнала на вторые входы блоков 4-6 подается переменное напряжение с генератора 7. При этом каждый усилительно-преобразовательный блок состоит из избирательного усилителя и синхронного детектора (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с. 108, рис.4.1, с.117, рис.4.8). Выходной сигнал с блока 4 подается на последовательно и согласно включенные обмотки 8-10. В результате этого канал, состоящий из датчика 1 с обмоткой 8 и блока 4, охвачен глубокой отрицательной обратной связью по магнитному полю, действующему на датчик 1. Обмотки 9 и 10, как и обмотка 8, воспроизводят магнитное поле равное по величине, но противоположное по направлению магнитному полю, измеренному датчиком 1, поэтому сигнал с выхода блока 5 пропорционален разности проекций векторов магнитной индукции B21 на ось LN, измеренной датчиками 2 и 1, а сигнал с выхода блока 6 пропорционален разности векторов магнитной индукции B31 на ось LN, измеренной датчиками 3 и 1, если отключить выход блока 5 от общего контакта обмоток 9 и 10. Следовательно, если отключить выход блока 5 от общего контакта обмоток 9 и 10, то сигналы с выходов блоков 5 и 6 пропорциональны пространственной производной магнитной индукции, созданной источниками магнитного поля помехи (наиболее удаленными источниками) при отсутствии близлежащего источника магнитного поля. При подключении выхода блока 5 к общему контакту обмоток 9 и 10 и при наличии как магнитного поля помехи, созданного наиболее удаленными источниками, так и магнитного поля полезного сигнала, созданного близлежащим источником, выходной сигнал с блока 5 пропорционален пространственной производной магнитной индукции, созданной источниками магнитного поля помехи и полезного сигнала. Этот сигнал подается в обмотку 10, осуществляя компенсацию неоднородности магнитного поля от наиболее удаленного и частичную компенсацию от близлежащего источников магнитного поля. Выходной сигнал с блока 6, пропорциональный неоднородности магнитного поля близлежащего источника поля, поступает на регистрирующий прибор 11. Таким образом, предлагаемый градиентометр, имея более простую конструкцию и меньшие затраты мощности по сравнению с устройством, которое принято за прототип, обеспечивает, как и упомянутое устройство (авт. св. N 1659942, БИ N 24, 1991), обнаружение неоднородности магнитного поля близлежащего источника от датчиков градиентометра на фоне однородного магнитного поля и неоднородного магнитного поля, помех, созданных наиболее удаленными источниками магнитного поля от датчиков упомянутого градиентометра.
Для реализации предлагаемого градиентометра могут быть использованы феррозондовые датчики, генератор переменной ЭДС и усилительнопреобразовательный блок приведенные в известной работе (Афанасьев Ю.В. Феррозондовые приборы. Л. Энергоатомиздат, 1986, с.127-138, рис.5.1, 5.3-5,6).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАДИЕНТОМЕТР | 1994 |
|
RU2091806C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1994 |
|
RU2124736C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1993 |
|
RU2082179C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1993 |
|
RU2077733C1 |
| Градиентометр | 1976 |
|
SU687425A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2171476C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2166735C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
Сущность изобретения: градиентометр обеспечивает обнаружение неоднородности магнитного поля, созданного близлежащим источником поля на фоне неоднородности магнитного поля наиболее удаленных от этих датчиков, но более интенсивных источников магнитного поля в результате использования трех датчиков, трех усилительно-преобразовательных блоков и трех последовательно соединенных обмоток компенсации. Это возможно благодаря компенсации магнитного поля датчиков путем определенного соединения обмоток компенсации и датчиков и усилительно-преобразовательных блоков. 1 ил.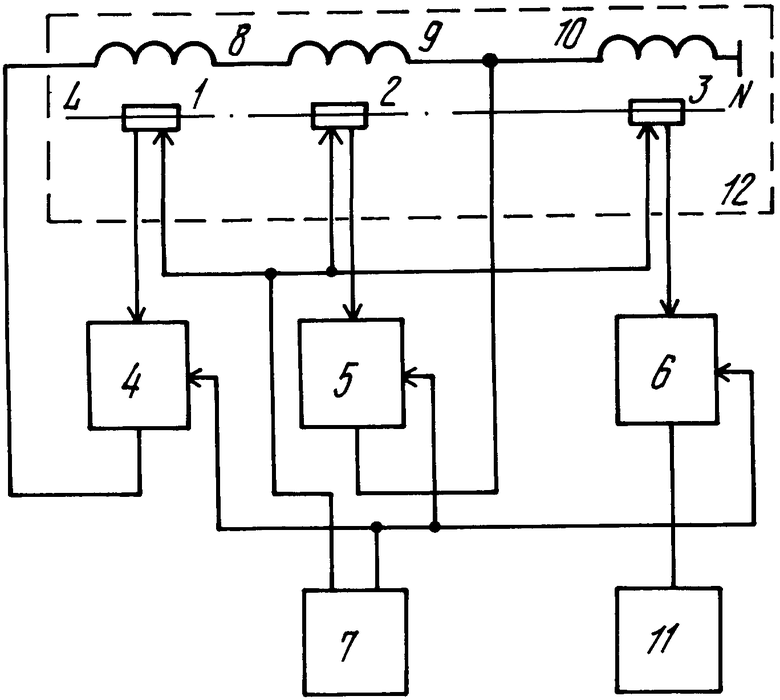
Градиентометр, содержащий первый, второй и третий магниточувствительные датчики с коллинеарно ориентированными осями, помещенные на жестком немагнитном основании последовательно вдоль одной оси основания, первый, второй и третий усилительно-преобразовательные блоки, первые входы которых подключены к выходам соответствующих датчиков, генератор переменной ЭДС, выходы которого подключены к входам магниточувствительных датчиков и к вторым входам усилительно-преобразовательных блоков, две обмотки компенсации, одна из которых охватывает первый, а вторая третий магниточувствительные датчики, и регистрирующий прибор, отличающийся тем, что он снабжен третьей обмоткой компенсации, охватывающей второй магниточувствительный датчик, один вывод которой подключен к одному выводу первой обмотки компенсации, а второй вывод подключен к одному выводу второй обмотки компенсации, выход первого усилительно-преобразовательного блока подключен к второму выводу первой обмотки компенсации, выход второго усилительно-преобразовательного блока подключен к общему контакту второй и третьей обмоток компенсации. второй вывод второй обмотки компенсации подключен к общему контакту градиентометра.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент 4068164, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1659942, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Тамберг Ю.Г | |||
| Оценка погрешности дипольного приближения для двух разнополярных источников | |||
| - Л.: Труды ВНИИЭП, N 2 (6), 1968 | |||
| с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Афанасьев Ю.В | |||
| Феррозондовые приборы | |||
| - Л.: Энергоатомиздат, 1986, с.127 - 138 | |||
| рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
