Изобретение относится к области разработки и исследований систем сопровождения авиационных и космических объектов, и может быть использовано для экспериментального определения их точностных характеристик (математических ожиданий, дисперсий, корреляционных функций ошибок определения составляющих вектора дальности  дальности D, углов азимута Φy и места Φz и векторов относительной скорости
дальности D, углов азимута Φy и места Φz и векторов относительной скорости  и относительного ускорения
и относительного ускорения  наблюдаемого авиационного или космического объекта).
наблюдаемого авиационного или космического объекта).
Широко известны способы экспериментального определения точностных характеристик систем сопровождения авиационных и космических объектов, заключающиеся в использовании фазовых пеленгаторов, работа которых основана на эффекте разности фаз радиоволн, излучаемых бортовым передатчиком авиационного или космического объекта и принимаемых антеннами наземной станции [1]
Наиболее близким к изобретению является способ экспериментального определения точностных характеристик систем сопровождения авиационных и космических объектов, устанавливаемых на измерительную платформу (наземную, морского, авиационного или космического корабля), заключающийся в сравнении текущих координат движения наблюдаемого авиационного или космического объекта (дальности D, углов азимута Φy и места Φz) измеренных исследуемой системой сопровождения и этих же координат -Dт, Φ
где ΔD ошибка определения дальности до наблюдаемого объекта исследуемой системы сопровождения;
ΔΦy, ΔΦz ошибки определения углов азимута и места наблюдаемого объекта исследуемой системы сопровождения.
После применения к получаемым ошибкам ΔD, ΔΦy, ΔΦz операций определения их математических ожиданий M[ΔD], M[ΔΦy], M[ΔΦz] и дисперсий D[ΔD], D[ΔΦy], D[ΔΦz] получают математические ожидания и дисперсии ошибок определения составляющих вектора дальности наблюдаемого объекта исследуемой системы сопровождения [1]
Известный способ и устройство обладают следующими недостатками:
1. Точностные характеристики систем сопровождения авиационных и космических объектов получают только по анализу ошибок определения составляющих вектора дальности  (дальности D углов азимута Φy и места Φz наблюдаемого объекта [1]
(дальности D углов азимута Φy и места Φz наблюдаемого объекта [1]
2. В качестве характеристик точности систем сопровождения авиационных и космических объектов используют только математические ожидания и дисперсии ошибок определения составляющих вектора дальности наблюдаемого объекта [1]
3. Точностные характеристики систем сопровождения авиационных и космических объектов по определению векторов относительной скорости  и относительного ускорения
и относительного ускорения  наблюдаемого объекта не получают, так как кинотелескоп, используемый в качестве эталонного средства измерений может лишь измерять дальность Dт, и углы азимута Φ
наблюдаемого объекта не получают, так как кинотелескоп, используемый в качестве эталонного средства измерений может лишь измерять дальность Dт, и углы азимута Φ
4. Точность технологии обработки результатов измерений кинотелескопа (ручного дешифрирования фотопленки) уступает точности современных высокоточных систем сопровождения, например оптико-электронного типа, поэтому кинотелескоп не может быть использован в качестве эталонного средства измерений по отношению к указанным системам сопровождения авиационных и космических объектов [2] [3]
5. Точностные характеристики систем сопровождения авиационных и космических объектов в реальном масштабе времени (т.е. в процессе выполнения эксперимента) не получают. Это связано с технологией обработки результатов измерений кинотелескопа необходимость проявки отснятых кадров фотопленки кинотелескопа и дальнейшей их ручной дишифрации в стационарных условиях на земле [2]
Целью изобретения является обеспечение возможности получения не только математических ожиданий, дисперсий, но и корреляционных функций ошибок определения и не только составляющих вектора дальности  (дальности D, углов азимута Φy и места Φz но и векторов относительной скорости
(дальности D, углов азимута Φy и места Φz но и векторов относительной скорости  и относительного ускорения
и относительного ускорения  наблюдаемого авиационного или космического объекта исследуемой высокоточной системой сопровождения авиационных и космических объектов, автоматизации процесса получения указанных точностных характеристик высокоточной системы сопровождения в ходе выполнения эксперимента, то есть в реальном масштабе времени.
наблюдаемого авиационного или космического объекта исследуемой высокоточной системой сопровождения авиационных и космических объектов, автоматизации процесса получения указанных точностных характеристик высокоточной системы сопровождения в ходе выполнения эксперимента, то есть в реальном масштабе времени.
Указанная цель достигается тем, что в ходе эксперимента по определению точностных характеристик высокоточной системы сопровождения авиационных и космических объектов, например оптико-электронного типа, устанавливаемой на измерительную платформу (наземную, морского, авиационного или космического корабля), в качестве эталонов для определения составляющих вектора дальности  наблюдаемого авиационного или космического объекта, используют интегралы известных дифференциальных уравнений кинематических связей измерительной платформы и наблюдаемого авиационного или космического объекта [4] и показания высокоточных гироинерциальных систем [5] размещаемых на измерительной платформе и на наблюдаемом объекте:
наблюдаемого авиационного или космического объекта, используют интегралы известных дифференциальных уравнений кинематических связей измерительной платформы и наблюдаемого авиационного или космического объекта [4] и показания высокоточных гироинерциальных систем [5] размещаемых на измерительной платформе и на наблюдаемом объекте: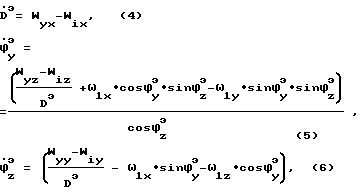
где уравнения 4, 5, 6 дифференциальные уравнения кинематических связей измерительной платформы и наблюдаемого объекта; производная дальности до наблюдаемого объекта (скорость сближения);
производная дальности до наблюдаемого объекта (скорость сближения);
Wцx, Wцy, Wцz составляющие путевой скорости наблюдаемого объекта, измеренные, установленной на нем гироинерциальной системой;
Wix, Wiy, Wz составляющие путевой скорости измерительной платформы, измеренные установленной на ней гироинерциальной системой; производные углов азимута и места наблюдаемого авиационного или космического объекта;
производные углов азимута и места наблюдаемого авиационного или космического объекта;
ω1x, ω1y, ω1z составляющие абсолютной угловой скорости измерительной платформы с исследуемой высокоточной системой сопровождения, измеренные, например, гироскопическими датчиками угловых скоростей (ДУС) [1]
Указанная цель достигается также тем, что при выполнении эксперимента по определению точностных характеристик высокоточных систем сопровождения авиационных и космических объектов в качестве эталонных средств измерений для определения эталонных значений векторов относительных скорости и ускорения используют высокоточные гироинерциальные системы, устанавливаемые на измерительную платформу и на наблюдаемый авиационный или космический объект и позволяющие с высокой точностью определить их путевые скорости и ускорения.
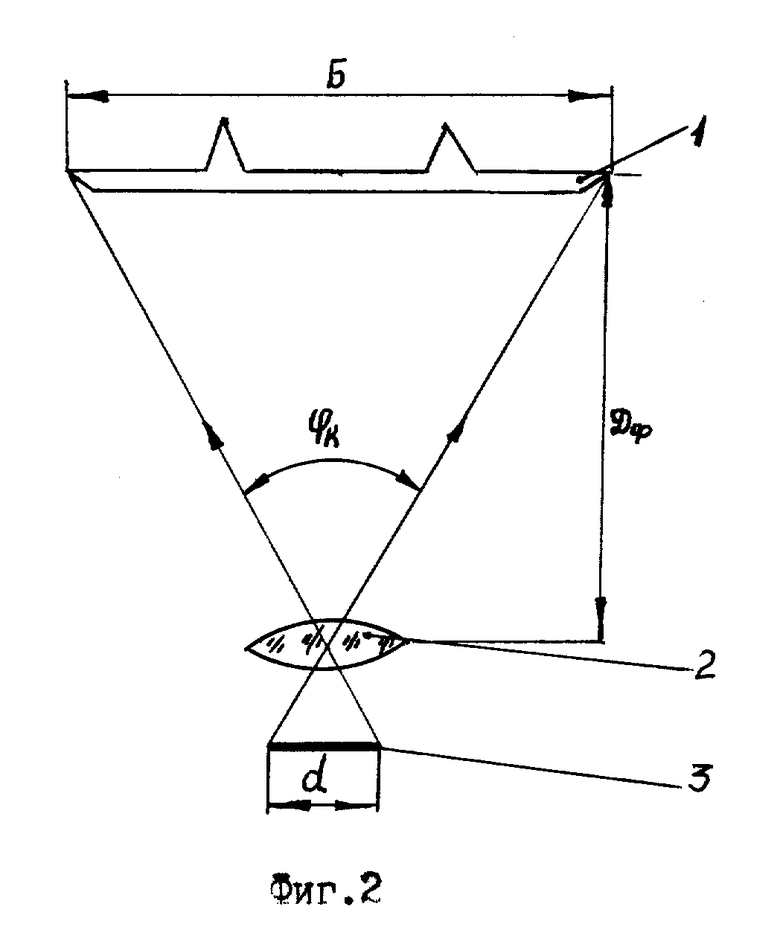
Далее будем иллюстрировать заявляемое изобретение на примере высокоточной системы сопровождения авиационных объектов, когда в качестве измерительной платформы, на которой устанавливают исследуемую высокоточную систему сопровождения авиационных объектов, ДУС и гироинерциальную систему, используют летательный аппарат. При этом будет рассматривать наиболее общий вариант, когда с целью повышения надежности определения точностных характеристик исследуемой высокоточной системы сопровождения авиационных объектов, в ходе эксперимента точностные характеристики получают одновременно в реальном масштабе времени на земле, на наблюдаемом авиационном объекте и на летательном аппарате с исследуемой системой сопровождения. В ходе эксперимента по определению точностных характеристик высокоточной системы сопровождения авиационных объектов все измерения, выполняемые на борту летательного аппарата с исследуемой системой сопровождения и на борту наблюдаемого авиационного объекта (также летательного аппарата) осуществляют в системе единого времени. Для этого используют службу единого времени, например, типа "Секунда-1" [1] размещаемую на земле, синхронизирующие импульсы единого времени которой передают на наблюдаемый авиационный объект и на летательный аппарат с исследуемой высокоточной системой сопровождения авиационных объектов. На земле перед полетом при выставке гироинерциальных систем выполняют операцию согласования ориентации стабилизированных систем координат обоих летательных аппаратов [5] После этого по известному размеру базы крыльев наблюдаемого объекта (летательного аппарата) путем поворота ручки "База" внешнебазового оптического дальномера известной прицельной системы, типа АСП-5, размещаемой на летательном аппарате с исследуемой системой сопровождения, устанавливают размер его дальномерного кольца и вводят фиксированную дальность, например равную ста метрам, при которой в процессе эксперимента наблюдаемый объект находится в центре перекрестия дальномерного кольца, а его база крыльев точно "вписывается" в дальномерное кольцо [6] На фиг. 1 показано дальномерное кольцо 1, когда база крыльев наблюдаемого объекта 2 точно вписывается в него. Размер дальномерного кольца d определяется углом Φк рассчитываемым по известной формуле [6]
где Dф фиксированная дальность;
Б известный размер базы крыльев наблюдаемого объекта.
На фиг. 2 пояснен принцип определения размера d дальномерного кольца. На фиг. 2 показаны база крыльев наблюдаемого объекта 1, оптическая линза дальномера 2, дальномерное кольцо 3.
Затем в воздухе для определения и исключения регулярных составляющих ошибок согласования стабилизированных систем координат, наблюдаемый авиационный объект выводится в режим горизонтального прямолинейного равномерного полета. Летательный аппарат с исследуемой высокоточной системой сопровождения авиационных объектов должен занять место точно вслед за наблюдаемым авиационным объектом и лететь также прямолинейно и горизонтально. С помощью внешне-базового оптического дальномера существующей прицельной системы, например типа АСП-5, при введенных "База" наблюдаемого объекта и фиксированной дальности, например ста метров, добиваются такого сближения и ориентации летательного аппарата с исследуемой системой сопровождения, при котором наблюдаемый объект находится в центре перекрестия дальномерного кольца, а базовый размер крыльев наблюдаемого объекта точно "вписывается" в дальномерное кольцо. Тем самым обеспечивается выполнение начальных условий для интегрирования дифференциальных уравнений (4), (5), (6), так как начальное значение дальности до наблюдаемого объекта будет равно фиксированной, например ста метрам. Начальными значениями углов азимута и места будет их равенство нулевым значениям (вследствие прямолинейности и горизонтальности полета наблюдаемого объекта и летательного аппарата с исследуемой высокоточной системой сопровождения).
Далее наблюдаемый авиационный объект выполняет ряд заранее оговариваемых до начала эксперимента маневров ("змейка", "вираж" и другие) для исследования их влияния на точность работы исследуемой системы сопровождения. В ходе выполнения эксперимента по определению точностных характеристик высокоточной системы сопровождения объектов в системе единого времени непрерывно измеряют:
1. На борту наблюдаемого авиационного (или космического) объекта:
а.) гироинерциальной системой (ГИС):
ψц, ϑц, γц курс, крен, тангаж;
Wцx, Wцy, Wцz составляющие вектора путевой скорости полета;
aцx, aцy, aцz составляющие вектора ускорения полета.
2. На борту летательного аппарата с исследуемой высокоточной системой сопровождения объектов:
а) гироинерциальной системой (ГИС):
ψ1, ϑ1, γ1 курс, крен, тангаж;
Wix, Wiy, Wiz составляющие вектора путевой скорости полета;
aix, aiy, aiz составляющие вектора ускорения полета.
б) блоком датчиков угловых скоростей (БДУС):
ω1x, ω1y, ω1z составляющие абсолютной угловой скорости летательного аппарата.
в) исследуемой высокоточной системой сопровождения, например оптико-электронного типа:
Dв, Φ значение вектора относительной скорости наблюдаемого объекта;
значение вектора относительной скорости наблюдаемого объекта; значение вектора относительного ускорения наблюдаемого объекта.
значение вектора относительного ускорения наблюдаемого объекта.
Использование оптического внешнебазового дальномера обеспечивает получение в ходе эксперимента начальных значений дальности Dн, углов азимута Φ (дальности Dэ, углов азимута Φ
(дальности Dэ, углов азимута Φ
по известному внешнему каналу связи (например радиоканалу [7]) в модуль определения точностных характеристик исследуемой высокоточной системы сопровождения, расположенный на земле, и в модуль определения точностных характеристик указанной системы сопровождения, расположенный на наблюдаемом объекте;
по известному бортовому каналу связи летательного аппарата с исследуемой системой сопровождения [8] в модуль определения точностных характеристик высокоточной системы сопровождения, расположенный на указанном летательном аппарате.
В ходе эксперимента по определению точностных характеристик высокоточной системы сопровождения авиационных объектов, значения составляющих векторов путевой скорости Wцx, Wцy, Wцz, и абсолютного ускорения aцx, aцy, aцz, измеряемые ГИС наблюдаемого объекта непрерывно передаются:
по внешним каналам связи [8] в модуль определения точностных характеристик исследуемой системы сопровождения, расположенный на земле и в модуль определения точностных характеристик указанной системы сопровождения, который располагается на борту летательного аппарата с исследуемой системой сопровождения;
по бортовому каналу связи наблюдаемого объекта [8] в модуль определения точностных характеристик исследуемой системы сопровождения, расположенный на борту наблюдаемого объекта. Значения составляющих векторов путевой скорости W1x, W1y, W1z и абсолютного ускорения a1x, a1y, a1z, измеряемые ГИС, а также значения составляющих абсолютной угловой скорости ω1x, ω1y, ω1z измеряемые блоком датчиков угловых скоростей (БДУС), установленных на летательном аппарате с исследуемой системой сопровождения непрерывно в ходе эксперимента передаются:
по внешним каналам связи [7] в модуль определения точностных характеристик исследуемой системы сопровождения, расположенный на земле и в модуль определения точностных характеристик указанной системы сопровождения, который располагается на борту наблюдаемого объекта;
по бортовому каналу связи [8] летательного аппарата с исследуемой системой сопровождения в модуль определения точностных характеристик указанной системы сопровождения, расположенный на борту летательного аппарата с указанной системой сопровождения.
Параметры движения наблюдаемого объекта, измеряемые исследуемой высокоточной системой сопровождения, например оптико-электронного типа  непрерывно в ходе эксперимента передаются:
непрерывно в ходе эксперимента передаются:
по внешним каналам связи [7] в модуль определения точностных характеристик исследуемой системы сопровождения, расположенный на земле и в модуль определения точностных характеристик указанной системы сопровождения, который располагается на борту наблюдаемого объекта;
по бортовому каналу связи [8] летательного аппарата с исследуемой системой сопровождения в модуль определения точностных характеристик указанной системы сопровождения, расположенный на борту летательного аппарата с указанной системой сопровождения.
В процессе эксперимента одновременно в модулях определения точностных характеристик исследуемой системы сопровождения, расположенных на земле, на борту наблюдаемого объекта, на борту летательного аппарата с исследуемой системой сопровождения, определение в реальном масштабе времени математических ожиданий, дисперсий, корреляционных функций ошибок определения составляющих вектора дальности  (дальности D, углов азимута Φy и места Φz и векторов относительных скорости
(дальности D, углов азимута Φy и места Φz и векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта исследуемой высокоточной системы сопровождения выполняется по известным формульным зависимостям [4]
наблюдаемого объекта исследуемой высокоточной системы сопровождения выполняется по известным формульным зависимостям [4]
1. Эталонные значения составляющих вектора дальности (Dэ, Φ
2. Ошибки исследуемой системы сопровождения по измерению составляющих вектора дальности наблюдаемого объекта определяют как:
где ΔDв, ΔΦ
Dв, Φ
3. Эталонные значения векторов относительных скоростей и ускорения наблюдаемого объекта для исследуемой высокоточной системы сопровождения определяют как:
где  значения векторов путевой скорости и ускорения наблюдаемого объекта, измеренные установленной на нем гироинерциальной системой (ГИС);
значения векторов путевой скорости и ускорения наблюдаемого объекта, измеренные установленной на нем гироинерциальной системой (ГИС); значения векторов путевой скорости и ускорения летательного аппарата с исследуемой системой сопровождения, измеренные его ГИС.
значения векторов путевой скорости и ускорения летательного аппарата с исследуемой системой сопровождения, измеренные его ГИС.
4. Ошибки определения векторов относительных скоростей  и ускорения
и ускорения  наблюдаемого объекта исследуемой системы сопровождения получают как:
наблюдаемого объекта исследуемой системы сопровождения получают как:
где  значения векторов относительных скорости и ускорения наблюдаемого объекта, измеренные исследуемой системой сопровождения.
значения векторов относительных скорости и ускорения наблюдаемого объекта, измеренные исследуемой системой сопровождения.
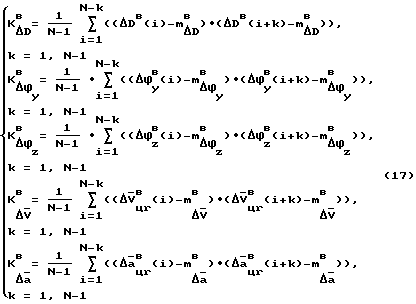
5. Математические ожидания, дисперсии, корреляционные функции ошибок определения векторов относительной скорости и ускорения, и ошибок определения составляющих вектора дальности дальности, углов азимута и места наблюдаемого объекта исследуемой системой сопровождения получают как:
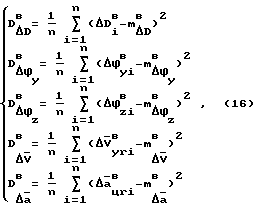
где математические ожидания ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокоточной системы сопровождения;
математические ожидания ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокоточной системы сопровождения; дисперсии ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокоточной системы сопровождения;
дисперсии ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокоточной системы сопровождения; корреляционные функции ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокочастотной системы сопровождения;
корреляционные функции ошибок определения соответственно дальности, углов азимута и места, векторов относительных скорости и ускорения наблюдаемого объекта исследуемой высокочастотной системы сопровождения;
n количество обрабатываемых измерений.
Современный уровень развития науки и техники позволяет реализовать предлагаемый способ определения точностных характеристик высокоточной системы сопровождения путем:
1. Применения уже имеющихся аппаратных средств и каналов связи между ними в одном устройстве по новому назначению:
ГИС, БДУС, прицельной системы, бортовых цифровых вычислительных машин, сумматоров, устанавливаемых на летательных аппаратах;
цифровой вычислительной машины, службы единого времени, сумматоров, размещаемых на земле;
2. Организации взаимосвязи работы указанных средств в одном устройстве при которой, они, выполняя основные свои функции, позволяют получать требуемые характеристики точности исследуемой системы сопровождения в реальном масштабе времени.
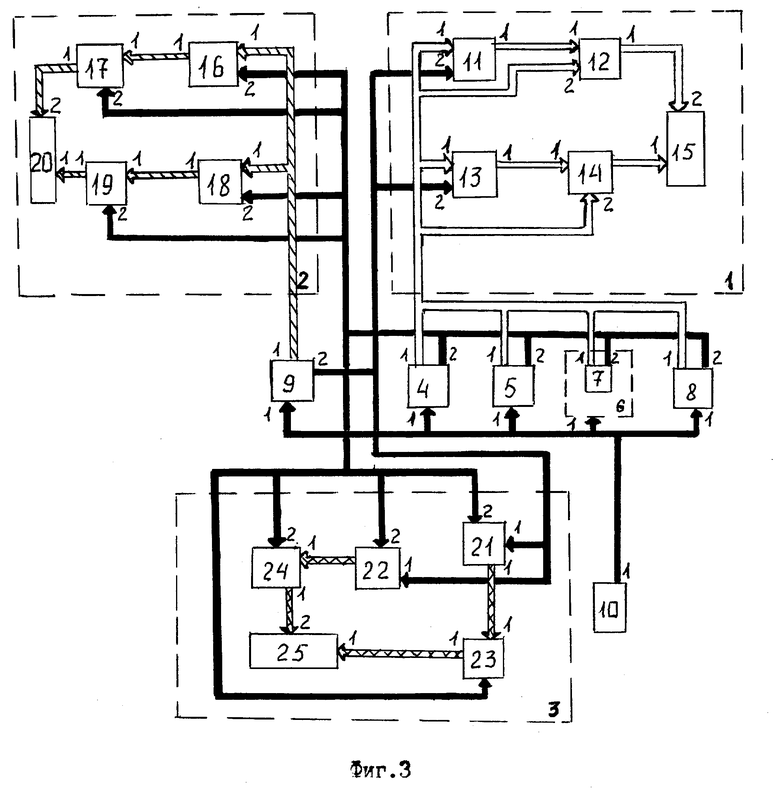
Устройство, позволяющее реализовать предлагаемый способ определения точностных характеристик высокоточной системы сопровождения объектов, схемно представлено на фиг. 3. Устройство состоит из ГИС 4, БДУС 5, прицельной системы 6, например типа АСП-5, внешнебазового оптического дальномера 7, входящего в состав прицельной системы 6, размещаемых на летательном аппарате с исследуемой высокоточной системой сопровождения авиационных объектов 8; ГИС 9, размещаемой на наблюдаемом объекте; службы единого времени 10, размещаемой на земле;
сумматоров 11, 12, 13, 14, бортовой цифровой вычислительной машины (БЦВМ) 15, например типа "Орбита 20" [9] с известным алгоритмом определения точностных характеристик [4] (выражения (15) (17)), входящих в состав модуля 1 определения точностных характеристик исследуемой системы сопровождения 8, расположенного на борту летательного аппарата с исследуемой системой сопровождения;
сумматоров 16, 17, 18, 19, бортовой цифровой вычислительной машины (БЦВМ) 20, например типа "Орбита 20" [9] с известным алгоритмом определения точностных характеристик [4] (выражения (15) (17)), входящих в состав модуля 2 определения точностных характеристик исследуемой системы сопровождения 8, расположенного на борту наблюдаемого объекта;
сумматоров 21, 22, 23, 24, цифровой вычислительной машины (ЦВМ) 25, например, типа 1ВМ РС 486 [10] с известным алгоритмом определения точностных характеристик [4] (выражения (15 17)), входящих в состав модуля 3 определения точностных характеристик исследуемой системы сопровождения 8, расположенного на земле.
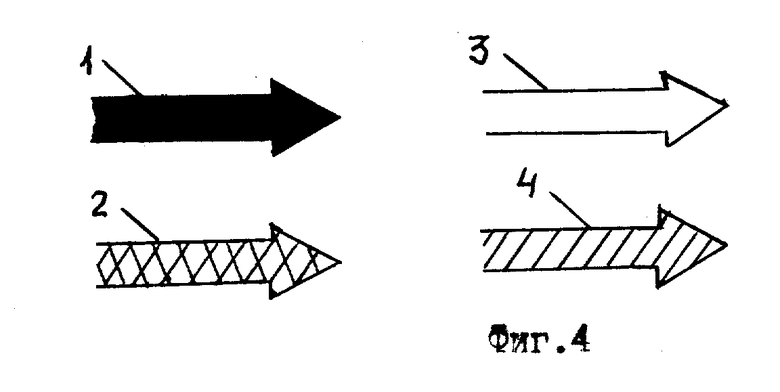
В состав заявляемого устройства входят также известные бортовые каналы связи [8] наблюдаемого объекта, летательного аппарата с используемой системой сопровождения, известные внешние каналы связи [7] (например, каналы радиосвязи), известные наземные каналы связи [8] Для пояснения фиг. 3 на фиг. 4 показаны внешние каналы связи 1, бортовые наземные каналы связи 2, бортовые каналы связи 3 летательного аппарата с исследуемой системой сопровождения, бортовые каналы связи 4 наблюдаемого объекта.
Сумматоры 11, 12, 13, 14, 16, 17, 18, 19, 21, 22, 23, 24 могут быть выполнены на микросхемах типа 112 ТМ1.
Устройство работает следующим образом. С выхода 1 службы единого времени 10 синхронизирующие импульсы единого времени поступают по внешнему каналу связи на вход 1 ГИС 4, на вход 1 высокоточной системы сопровождения 8, на вход 1 ВДУС 5, на вход 1 ГИС 9, на вход 1 прицельной системы 6 и обеспечивают тем самым выполняемые ими измерения в системе единого времени. Параметры W1x, W1y, W1z, измеряемые ГИС 4 поступают:
с ее выхода 1 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 сумматора 11;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 16 и на вход 2 сумматора 22.
Значения векторов  определяемые по данным ГИС 4, передают:
определяемые по данным ГИС 4, передают:
с ее выхода 1 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 сумматора 13;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 18 и на вход 2 сумматора 21.
Величины ω1x, ω1y, ω1z измеряемые БДУС 5, передают:
с его выхода 1 по бортовому каналу связи летательного аппарата и исследуемой системой сопровождения на вход 1 сумматора 11;
с его выхода 2 по внешнему каналу связи на вход 2 сумматора 16 и на вход 2 сумматора 22.
Определяемые внешнебазовым дальномером 7 начальные значения дальности Dн, углов азимута Φ
с его выхода 1 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 сумматора 11;
с его выхода 2 по внешнему каналу связи на вход 2 сумматора 16 и на вход 2 сумматора 22.
Параметры Dв, Φ
с ее выхода 1 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 2 сумматора 12;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 17 и на вход 2 сумматора 24.
Значения векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта, изменяемые исследуемой высокоточной системой сопровождения передают:
наблюдаемого объекта, изменяемые исследуемой высокоточной системой сопровождения передают:
с ее выхода 1 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 2 сумматора 14;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 19 и на вход 2 сумматора 23.
Параметры Wцx, Wцy, Wцz, измеряемые ГИС 9 поступают:
с ее выхода 1 по бортовому каналу связи наблюдаемого объекта на вход 1 сумматора 16;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 11 и на вход 1 сумматора 22.
Значения векторов  определяемые по данным ГИС 9, передают:
определяемые по данным ГИС 9, передают:
с ее выхода 1 по бортовому каналу связи наблюдаемого объекта на вход 1 сумматора 18;
с ее выхода 2 по внешнему каналу связи на вход 2 сумматора 13 и на вход 1 сумматора 21.
Эталонные значения составляющих вектора дальности  (дальности Dэ, углов азимута Φ
(дальности Dэ, углов азимута Φ
с выхода 1 сумматора 11 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 сумматора 12;
с выхода сумматора 16 по бортовому каналу связи наблюдаемого объекта на вход 1 сумматора 17;
с выхода 1 сумматора 22 по наземному каналу связи на вход сумматора 24.
Эталонные значения векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта поступают:
наблюдаемого объекта поступают:
с выхода 1 сумматора 13 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 сумматора 14;
с выхода 1 сумматора 18 по бортовому каналу связи наблюдаемого объекта на вход 1 сумматора 19;
с выхода 1 сумматора 21 по наземному каналу связи на вход 1 сумматора 23.
Значения ошибок составляющих вектора дальности  наблюдаемого объекта исследуемой высокоточной системы сопровождения передаются:
наблюдаемого объекта исследуемой высокоточной системы сопровождения передаются:
с выхода 1 сумматора 12 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 2 БЦВМ 15;
с выхода 1 сумматора 17 по бортовому каналу связи наблюдаемого объекта на вход 2 БЦВМ 20;
с выхода 1 сумматора 24 по наземному каналу связи на вход 2 ЦВМ 25.
Значения ошибок векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта исследуемой высокоточной системы сопровождения передаются:
наблюдаемого объекта исследуемой высокоточной системы сопровождения передаются:
с выхода 1 сумматора 14 по бортовому каналу связи летательного аппарата с исследуемой системой сопровождения на вход 1 БЦВМ 15;
с выхода 1 сумматора 19 по бортовому каналу связи наблюдаемого объекта на вход 1 БЦВМ 20;
с выхода 1 сумматора 23 по наземному каналу связи на вход 1 ЦВМ 25.
В БЦВМ 15, БЦВМ 20, ЦВМ 25 по значениям величин ΔDв, ΔΦ поступающим в каждую из них, по известному алгоритму определения точностных характеристик [4] (выражения (15) 17)), определяются в реальном масштабе времени (т.е. в ходе эксперимента) точностные характеристики исследуемой высокоточной системы сопровождения -
поступающим в каждую из них, по известному алгоритму определения точностных характеристик [4] (выражения (15) 17)), определяются в реальном масштабе времени (т.е. в ходе эксперимента) точностные характеристики исследуемой высокоточной системы сопровождения -
Сравнение заявляемого технического решения на способ и устройство определения точностных характеристик высокоточных систем сопровождения авиационных и космических объектов с прототипом позволило установить соответствие его критерию "новизна". При изучении других известных технических решений на способ определения точностных характеристик высокоточных систем сопровождения объектов в данной области техники признаки, отличающие заявляемый способ, не были выявлены и потому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
Сравнение заявляемого технического решения на устройство позволяющее реализовать предлагаемый способ определения точностных характеристик высокоточных систем сопровождения авиационных и космических объектов с другими техническими решениями показывает, что гироинерциальные системы, бортовые цифровые вычислительные машины, наземные вычислительные машины, внешние и бортовые каналы связи, прицельные системы, сумматоры, блоки датчиков угловых скоростей широко известны [5] [6] [7] [8] [9] [10]
Однако при применении их в одном устройстве в описанной взаимосвязи по новому назначению они проявляют новые свойства, что позволяет впервые получить точностные характеристики высокоточных систем сопровождения по векторам относительной скорости  и относительного ускорения
и относительного ускорения  наблюдаемого объекта, а именно математические ожидания, дисперсии, корреляционные функции ошибок определения векторов
наблюдаемого объекта, а именно математические ожидания, дисперсии, корреляционные функции ошибок определения векторов  исследуемой высокоточной системы сопровождения, а также получить не только математические ожидания и дисперсии, но и корреляционные функции ошибок определения составляющих вектора дальности
исследуемой высокоточной системы сопровождения, а также получить не только математические ожидания и дисперсии, но и корреляционные функции ошибок определения составляющих вектора дальности  (дальности Db, углов азимута Φ
(дальности Db, углов азимута Φ
Предлагаемый способ и устройство определения точностных характеристик высокоточных систем сопровождения авиационных и космических объектов может быть реализован, например в ходе экспериментальных летных исследований указанных систем сопровождения.
Для этого имеется необходимая материально-техническая база, так как современные летательные аппараты оснащены гироинерциальными системами, например типа LTN-5 [5] позволяющими с высокой точностью определять значения векторов их ускорений и путевых скоростей. В качестве службы единого времени может быть использована аппаратура типа "Секунда-1" [1] а в качестве прицельной системы прицельное устройство, например типа АСП-5 с внешнебазовым дальномером [6] Сумматоры, используемые в заявляемом устройстве могут быть выполнены, например, на микросхемах типа 112ТМ1. Внешний канал связи представляет собой известный канал радиосвязи [7] Бортовые наземные каналы связи и бортовые каналы связи летательного аппарата являются кабельной проводной связью [8] Кроме того, на современных летательных аппаратах используют БЦВМ, например типа "Орбита-20" [9] Наземная ЦВМ может представлять собой вычислительную машину, например типа IBM-PC-486 [10]
Использование предлагаемого способа и устройства определения точностных характеристик высокоточных систем сопровождения авиационных и космических объектов позволит: 1. Получать не только математические ожидания и дисперсии, но и корреляционные функции (спектральные характеристики) ошибок определения и не только составляющих вектора дальности  но и векторов относительной скорости
но и векторов относительной скорости  и относительного ускорения
и относительного ускорения  наблюдаемого объекта высокоточной системы сопровождения авиационных и космических объектов;
наблюдаемого объекта высокоточной системы сопровождения авиационных и космических объектов;
2. Определять наиболее оптимальные характеристики фильтров, используемых в системах сопровождения авиационных и космических объектов, по полученным корреляционным функциям (спектральным характеристикам ошибок определения составляющих вектора дальности  и векторов относительных скорости
и векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта;
наблюдаемого объекта;
3. Определять в процессе исследований, т.е. в реальном масштабе времени точностные характеристики высокоточных систем сопровождения и тем самым автоматизировать процесс их получения;
4. Может быть использован при исследованиях точностных характеристик систем сопровождения и средней точности, например радиолокационного типа, и не только бортовых (самолетных), но и наземных.
На фиг. 1 представлено дальномерное кольцо и база крыльев наблюдаемого объекта; на фиг.2 принцип определения размера дальномерного кольца; на фиг.3 блок-схема устройство определения точностных характеристик высокоточной системы сопровождения авиационных и космических объектов; на фиг.4 каналы связи, используемые в заявляемом устройстве.
Источники информации
1. В. Н.Чернуха. Основы испытаний авиационной техники. М. ВВИА им. Н.Е. Жуковского, 1990, с. 57 58, с. 87 107, с. 127 130, с. 200 238.
2. В.Н.Чернуха, Ю.В.Новокшонов. Основы испытаний авиационной техники, 2. М. ВВИА им. Н.Е.Жуковского, 1991, с. 80 110.
3. А.И.Леонов. Испытания РЛС. М. Радио и связь, 1990, с. 44.
4. Р. В.Мубаракшин. Прицельные системы стрельбы, ч. 1. М. ВВИА им. Н.Е. Жуковского, 1973, с. 46, с. 300 318.
5. Е.Г.Харин. Оценка характеристик инерциальных систем и курсовертикалей по результатам летного эксперимента (курс лекций), Астраханская обл. г. Актубинск, 1982
6. Р.В.Мубарашкин. Авиационное прицельное устройство АСП-5. М. ВВИА им. Н.Е.Жуковского, 1970, с. 38 50.
7. Б.Х.Кривицкий. Справочник по теоретическим основам радиоэлектроники, т. 1. М: Энергия, 1977, с. 300 330.
8. Б.Х.Кривицкий. Справочник по теоретическим основам радиоэлектроники, т. 2. -М: Энергия, 1977, с. 227, с. 230 232.
9. В. Р. Мамошин. Бортовые цифровые вычислительные машины комплексов авиационного вооружения. М. ВВИА им. Н.Е.Жуковского, 1991, с. 119 120, с. 103.
10. В. С. Фигурнов. IBM PC для пользователя. М. Финансы и статистика, 1994.
Изобретение относится к области разработки и исследований систем сопровождения авиационных и космических объектов и может быть использовано для определения их точностных характеристик (математических ожиданий (МО), дисперсий, корреляционных функций (КФ) ошибок определения составляющих вектора дальности  - дальности Dв, углов азимута Φ
- дальности Dв, углов азимута Φ и ускорения
и ускорения  наблюдаемого объекта). Целью изобретения является обеспечение возможности получения не только МО, дисперсий, но и КФ ошибок определения и не только составляющих вектора дальности
наблюдаемого объекта). Целью изобретения является обеспечение возможности получения не только МО, дисперсий, но и КФ ошибок определения и не только составляющих вектора дальности  , но и векторов относительных скорости
, но и векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта исследуемой системы сопровождения, а также получение их в реальном масштабе времени. Способ определения точностных характеристик основан на сравнении величин Dв,
наблюдаемого объекта исследуемой системы сопровождения, а также получение их в реальном масштабе времени. Способ определения точностных характеристик основан на сравнении величин Dв,  , измеряемых системой сопровождения с эталонными Dэ,
, измеряемых системой сопровождения с эталонными Dэ,  , и дальнейшего применения к получаемым ошибкам операций определения их МО, дисперсий и КФ. Устройство содержит широко известные высокоточные гироинерциальные системы, вычислительные машины, сумматоры, датчики угловых скоростей, каналы связей, при применении которых по новому назначению в указанной определенной конфигурации системных связей они позволяют автоматически в реальном масштабе времени получать указанные выше точностные характеристики. 2 с. и 8 з.п. ф-лы, 4 ил.
, и дальнейшего применения к получаемым ошибкам операций определения их МО, дисперсий и КФ. Устройство содержит широко известные высокоточные гироинерциальные системы, вычислительные машины, сумматоры, датчики угловых скоростей, каналы связей, при применении которых по новому назначению в указанной определенной конфигурации системных связей они позволяют автоматически в реальном масштабе времени получать указанные выше точностные характеристики. 2 с. и 8 з.п. ф-лы, 4 ил.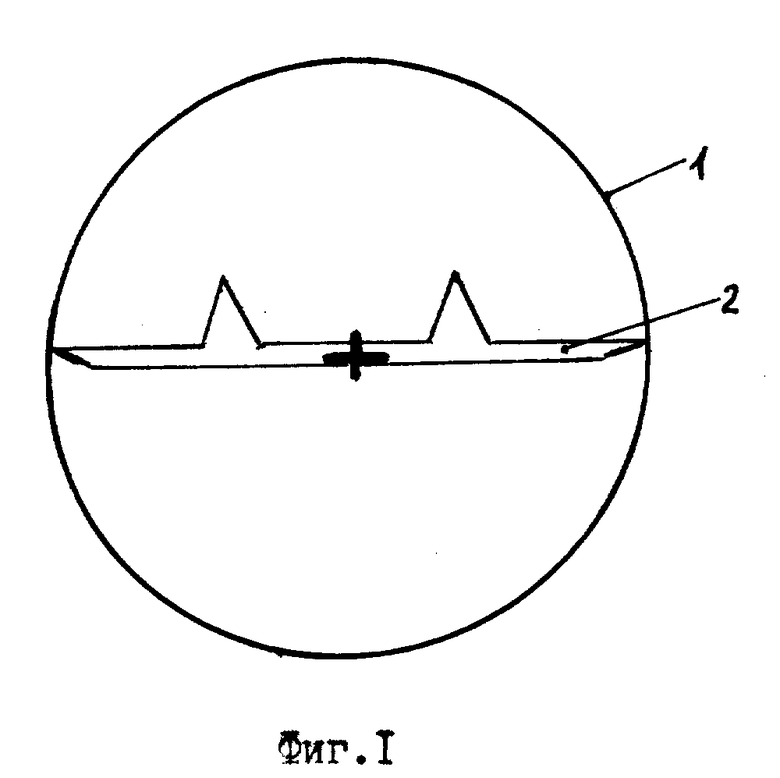
 дальность Dв, углы азимута Φ
дальность Dв, углы азимута Φ дальность Dэ, углы азимута Φ
дальность Dэ, углы азимута Φ осуществляют в системе единого времени, определяют с помощью исследуемой системы сопровождения ошибки измерения составляющих вектора дальности ошибку по дальности ΔDв, ошибку по углу азимута ΔΦ
осуществляют в системе единого времени, определяют с помощью исследуемой системы сопровождения ошибки измерения составляющих вектора дальности ошибку по дальности ΔDв, ошибку по углу азимута ΔΦ
где n количество обрабатываемых измерений;
ΔDв, ΔΦ математические ожидания ошибок измерения исследуемой системы сопровождения соответственно дальности, углов азимута и места наблюдаемого объекта;
математические ожидания ошибок измерения исследуемой системы сопровождения соответственно дальности, углов азимута и места наблюдаемого объекта; дисперсии ошибок измерения исследуемой системы сопровождения соответственно дальности, углов азимута и места наблюдаемого объекта,
дисперсии ошибок измерения исследуемой системы сопровождения соответственно дальности, углов азимута и места наблюдаемого объекта,
отличающийся тем, что дополнительно к измеренным точностным характеристикам на наблюдаемом объекте с помощью гироинерциальной системы измеряют значения составляющих его путевой скорости Wц x, Wц y, Wц z, векторов его путевой скорости  и ускорения
и ускорения  измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на летательном аппарате с исследуемой системой сопровождения, а по бортовым каналам связи в блок определения точностных характеристик, расположенный на наблюдаемом объекте, с помощью прицельного устройства с внешнебазовым дальномером, расположенного на летательном аппарате с исследуемой системой сопровождения, определяют начальные значения дальности наблюдаемого объекта Dн, начальное значение угла азимута Φ
измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на летательном аппарате с исследуемой системой сопровождения, а по бортовым каналам связи в блок определения точностных характеристик, расположенный на наблюдаемом объекте, с помощью прицельного устройства с внешнебазовым дальномером, расположенного на летательном аппарате с исследуемой системой сопровождения, определяют начальные значения дальности наблюдаемого объекта Dн, начальное значение угла азимута Φ и ускорения
и ускорения  измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на наблюдаемом объекте, а по бортовым каналам связи - в блок определения точностных характеристик, расположенный на летательном аппарате с исследуемой системой сопровождения, с помощью исследуемой системы сопровождения измеряют значения дальности Dв, углов азимута, Φ
измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на наблюдаемом объекте, а по бортовым каналам связи - в блок определения точностных характеристик, расположенный на летательном аппарате с исследуемой системой сопровождения, с помощью исследуемой системы сопровождения измеряют значения дальности Dв, углов азимута, Φ и ускорения
и ускорения  измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на наблюдаемом объекте, а по бортовым каналам связи в блок определения точностных характеристик, расположенный на летательном аппарате с исследуемой системой сопровождения, причем в вычислительных машинах блоков определения точностных характеристик определяют математические ожидания, дисперсии и корреляционные функции ошибок измерения исследуемой системой сопровождения составляющих вектора дальности
измеренные значения передают по внешним каналам связи в блоки определения точностных характеристик, расположенные на земле и на наблюдаемом объекте, а по бортовым каналам связи в блок определения точностных характеристик, расположенный на летательном аппарате с исследуемой системой сопровождения, причем в вычислительных машинах блоков определения точностных характеристик определяют математические ожидания, дисперсии и корреляционные функции ошибок измерения исследуемой системой сопровождения составляющих вектора дальности  дальности ΔDв, углов азимута ΔΦ
дальности ΔDв, углов азимута ΔΦ и ускорения
и ускорения  наблюдаемого объекта, при этом величины
наблюдаемого объекта, при этом величины  определяют путем сравнения измеренных значений
определяют путем сравнения измеренных значений  с эталонными значениями
с эталонными значениями  при этом все точностные характеристики математические ожидания, дисперсии, корреляционные функции ошибок измерения исследуемой системы сопровождения составляющих вектора дальности, векторов относительных скорости
при этом все точностные характеристики математические ожидания, дисперсии, корреляционные функции ошибок измерения исследуемой системы сопровождения составляющих вектора дальности, векторов относительных скорости  и ускорения
и ускорения  определяют одновременно на земле, на наблюдаемом объекте и на летательном аппарате с исследуемой системой сопровождения.
определяют одновременно на земле, на наблюдаемом объекте и на летательном аппарате с исследуемой системой сопровождения. дальности Dэ, углов азимута Φ
дальности Dэ, углов азимута Φ
где t интервал времени, в течение которого определяют эталонные значения величин Dэ, Φ
вычисленные значения эталонных величин Dэ, Φ во вторых сумматорах по результатам сравнения измеренных исследуемой системой сопровождения значений Dв, Φ
во вторых сумматорах по результатам сравнения измеренных исследуемой системой сопровождения значений Dв, Φ и ускорения
и ускорения  наблюдаемого объекта измеренные гироинерциальными системами наблюдаемого объекта и летательного аппарата с исследуемой системой сопровождения значения векторов
наблюдаемого объекта измеренные гироинерциальными системами наблюдаемого объекта и летательного аппарата с исследуемой системой сопровождения значения векторов  соответственно по каналам связи передают на входы третьих сумматоров блоков определения точностных характеристик, расположенных на летательном аппарате с исследуемой системой сопровождения, на наблюдаемом объекте, на земле, в третьих сумматорах по результатам разности измеренных значений векторов
соответственно по каналам связи передают на входы третьих сумматоров блоков определения точностных характеристик, расположенных на летательном аппарате с исследуемой системой сопровождения, на наблюдаемом объекте, на земле, в третьих сумматорах по результатам разности измеренных значений векторов  определяют эталонные значения векторов относительных скорости
определяют эталонные значения векторов относительных скорости  и ускорения
и ускорения 
4. Способ по п.1, отличающийся тем, что по каналам связи на входы четвертых сумматоров блоков определения точностных характеристик, расположенных на летательном аппарате с исследуемой системой сопровождения, на наблюдаемом объекте, на земле, передают значения векторов относительных скорости  и ускорения
и ускорения  наблюдаемого объекта, измеренные исследуемой системой сопровождения, а также эталонные значения векторов относительных скорости
наблюдаемого объекта, измеренные исследуемой системой сопровождения, а также эталонные значения векторов относительных скорости  и ускорения
и ускорения  определенные в третьих сумматорах блоков определения точностных характеристик, в четвертых сумматорах по результатам сравнения измеренных исследуемой системы сопровождения значений векторов
определенные в третьих сумматорах блоков определения точностных характеристик, в четвертых сумматорах по результатам сравнения измеренных исследуемой системы сопровождения значений векторов  с эталонными
с эталонными  определяют ошибки измерения
определяют ошибки измерения  и передают их в вычислительные машины блоков для определения точностных характеристик.
и передают их в вычислительные машины блоков для определения точностных характеристик. в вычислительных машинах блоков определения точностных характеристик, расположенных на земле, на наблюдаемом объекте, на летательном аппарате с исследуемой системой сопровождения определяют математические ожидания
в вычислительных машинах блоков определения точностных характеристик, расположенных на земле, на наблюдаемом объекте, на летательном аппарате с исследуемой системой сопровождения определяют математические ожидания
дисперсии:
корреляционные функции:
ошибок измерения составляющих вектора дальности ΔDв, ΔΦ и ускорения
и ускорения  наблюдаемого объекта исследуемой системы сопровождения,
наблюдаемого объекта исследуемой системы сопровождения,
где  ошибки измерения исследуемой системы сопровождения значений векторов относительных скорости и ускорения наблюдаемого объекта;
ошибки измерения исследуемой системы сопровождения значений векторов относительных скорости и ускорения наблюдаемого объекта;
n количество обрабатываемых измерений.
| Чернуха В.Н | |||
| Основы испытаний авиационной техники | |||
| - М.: ВВИА им.Н.Е.Жуковского, 1990, с.57, 58, 87 - 107, 127 - 130, 200 - 238. |
