Изобретение относится к транспортным средствам повышенной проходимости и может быть использовано в многоопорных самоходных технологических, дождевальных и поливных машинах, работающих как позиционно, так и в непрерывном движении.
Известны опоры для электрифицированных дождевальных и поливных машин, работающих как позиционно, так и в непрерывном движении, выполненные в виде корпуса с установленными на нем силовым приводом и движителей в виде колес. (Многоопорные дождевальные машины. Под ред. С.X.Гусейн-Заде. М.: Колос, 1984, 191 с.).
Такие опоры обладают низкой проходимостью вследствие того, что колесная опора оставляет глубокую колею, при этом возникает бульдозерный эффект, приводящий к повышенным энергозатратам.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры по а.с. №2063353 (кл. B62D 57/032, 1993 г.). Шагающая опора содержит корпус с побортно установленными на нем двумя передними и двумя задними шагающими движителями в виде шарнирных четырехзвенников лямбдаобразного типа, имеющими между собой дифференциальную связь, которая автоматически переходит в жесткую и обратно, при определенных угловых положениях парных кривошипов.
Указанная шагающая опора решает техническую задачу, связанную с уменьшением энергетических затрат, за счет синхронизации, посредством встроенного самоблокирующегося дифференциала, моментов отрыва и опускания побортных движителей на опорную поверхность. Ввиду конструктивной особенности лямбдаобразного шагающего движителя часть траектории башмака, соответствующая опорной фазе, может стремиться к прямой, но быть ей не может, поэтому значительные энергозатраты, идущие на подъем центра тяжести машины, полностью не устранимы. Несовершенство шагающего механизма лямбдаобразного типа не позволяет значительно увеличить высоту шага и уменьшить массу неуравновешенных частей, наличие которой вносит нежелательное возмущающее воздействие в движение транспортного средства.
Данная шагающая опора имеет невысокий технический уровень, что обусловлено наличием рабочего цикла, не обеспечивающего отсутствие вертикальных колебаний центра тяжести машины и возможность преодоления больших препятствий.
В этой связи важной задачей является создание нового движителя, обеспечивающего более высокий шаг и траекторию башмака, содержащую прямолинейный опорный участок, и привода шагающей опоры, упрощающего блокировку дифференциала, для транспортных средств повышенной проходимости.
Техническим результатом заявленной конструкции шагающей опоры является создание шагающего движителя с траекторией башмака и рабочего цикла, исключающих приседание транспортного средства, что снижает энергоемкость силового привода и значительно повышает проходимость шагающей машины.
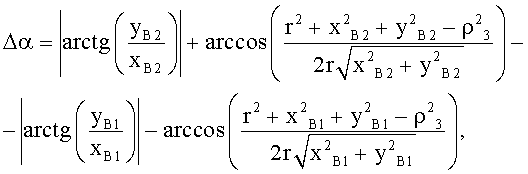
Указанный технический результат достигается тем, что шагающая опора для многоопорных самоходных машин и для транспортных средств повышенной проходимости, содержит корпус с побортно установленными на нем двумя передними и двумя задними шагающими движителями, силовой привод, а также передние ведущие полуоси, соединенные симметричным дифференциалом, шагающие движители, выполненные в виде шарнирных четырехзвенников, расположенных в вертикальной плоскости, содержащие криволинейные опоры, снабженные башмаками и шарнирно связанные с кривошипами, передние ведущие полуоси, жестко связанные с кривошипами передних шагающих движителей, и снабженных передним самоблокирующимся симметричным дифференциалом, шагающая опора снабжена задними ведущими полуосями, жестко связанными с кривошипами задних шагающих движителей и соединенными задним симметричным дифференциалом, причем ведущие передние и задние полуоси входят друг в друга, образуя вместе с симметричными дифференциалами передний и задний самоблокирующиеся симметричные дифференциалы, и имеют зубья, два из которых на одной из полуосей передних и задних движителей нарезаны с угловым шагом:
где
Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, yB1, xB2, yB2 - координаты точек входа и выхода башмака из фазы взаимодействия с грунтом;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну,
шагающая опора снабжена микропроцессорным блоком управления, установленным на корпусе, абсолютными энкодерами, подключенными к входам микропроцессорного блока и расположенными на полуосях симметричных дифференциалов, электромагнитами, подсоединенными к выходам микропроцессорного блока, имеющими силовую связь с тормозными устройствами, расположенными на ведущих полуосях шагающих движителей, источником электропитания, установленным на корпусе, к которому подсоединен микропроцессорный блок управления, а двигатель силового привода подключен к выходу микропроцессорного блока управления и каждая криволинейная опора передних и задних шагающих движителей шарнирно соединена с секционной пружиной, свободный конец которой шарнирно прикреплен к корпусу, и нагрузочным устройством, представляющим собой пару радиально-упорных подшипников, посажанных на одну ось, которые расположены в направляющей, выполненной в виде криволинейного контура, жестко закрепленной на корпусе с формой нагружаемого участка, описываемой системой уравнений

где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры.
Введение задних ведущих полуосей, передающих крутящий момент от двигателя к жестко связанным с ними кривошипам задних шагающих движителей, и наличие дифференциальной связи между задними ведущими полуосями, реализуемой задним симметричным дифференциалом, позволяет улучшить адаптацию башмаков (стоп) к профилю грунта и препятствиям, что в свою очередь повышает проходимость шагающей опоры.
Новые передний и задний самоблокирующиеся симметричные дифференциалы, образованные передними и задними ведущими полуосями, которые входят друг в друга, и симметричными дифференциалами, упрощают конструкцию, так как исключается необходимость в дополнительных деталях.
Наличие зубьев у ведущих полуосей, два из которых на одной из ведущих полуосей передних и задних движителей нарезаны с угловым шагом:
где
Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, yB1, xB2, yB2 - координаты точек входа и выхода башмака из фазы взаимодействия с грунтом;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну,
обеспечивает блокировку дифференциалов по достижении разности фаз между кривошипами Δα парных движителей, что позволяет исключить вертикальные колебания корпуса машины, тем самым снизить энергоемкость силового привода.
Введение микропроцессорной системы управления, состоящей из микропроцессорного блока управления, установленного на корпусе, к выходу которого подключен двигатель силового привода, и подсоединенного к источнику питания, расположенному на корпусе, абсолютных энкодеров, подключенных к входам микропроцессорного блока и расположенных на полуосях симметричных дифференциалов, электромагнитов, подсоединенных к выходам микропроцессорного блока, имеющих силовую связь с тормозными устройствами, расположенными на ведущих полуосях шагающих движителей, позволяет автоматически отслеживать и корректировать местоположение стоп движителей и их линейные скорости, что исключает ситуацию анормальной работы парных движителей - позволяет уменьшить энергоемкость силового привода шагающей опоры и исключить явление удара в блокирующем устройстве.
Применяемая новая конструкция передних и задних четырехзвенных шагающих движителей с криволинейной опорой, шарнирно соединенной с секционной пружиной, свободный конец которой шарнирно прикреплен к корпусу, и нагрузочным устройством, представляющим собой пару радиально-упорных подшипников, посажанных на одну ось, которые расположены в направляющей, выполненной в виде криволинейного контура, жестко закрепленной на корпусе с формой нагружаемого участка, описываемой системой уравнений
где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры,
обладает преимуществами, позволяющими расширить область применения шагающей опоры, так как значительно повышается проходимость и исчезают энергозатраты, вызванные приседанием корпуса машины и обусловленные несовершенством опорного участка траектории башмака (стопы) лямбдаобразного механизма.
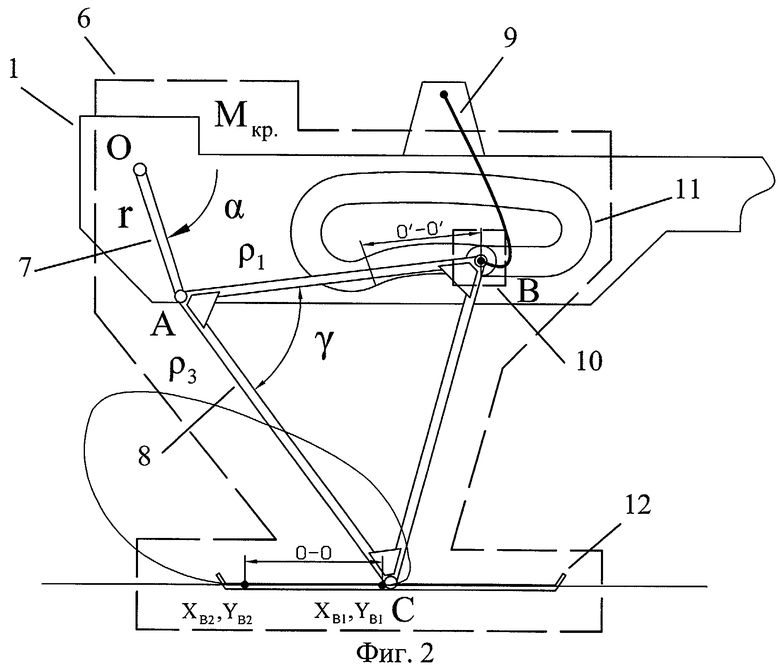
На фиг.1 представлен общий вид шагающей опоры; на фиг.2 - шагающий механизм с направляющей; на фиг.3 - секционная пружина; на фиг 4. - кинематическая схема привода шагающих движителей; на фиг.5 - блокирующее устройство.
Шагающая опора (фиг.1) содержит несущий корпус 1, на котором крепится полезный груз.
На корпус 1 побортно установлены два передних 2 и два задних шагающих движителя 3, силовой привод, состоящий из двигателя 4 и редуктора 5.
Шагающие движители 2, 3 выполнены в виде шарнирных четырыхзвенников 6 (фиг.2), каждый из которых состоит из кривошипа 7, одним концом шарнирно соединенного с корпусом 1, а другим - с криволинейной опорой 8. Криволинейная опора 8 шарнирно соединена с секционной пружиной 9, свободный конец которой шарнирно прикреплен к корпусу 1, и нагрузочным устройством 10, представляющим собой пару радиально-упорных подшипников, посажанных на одну ось, которые расположены в направляющей 11, выполненной в виде криволинейного контура, жестко закрепленной на корпусе 1 с формой нагружаемого участка О′-О′, описываемой системой уравнений
где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры.
К нижней части криволинейной опоры 8 шарнирно крепится башмак 12.
Секционная пружина 9 представляет собой совокупность последовательно шарнирно соединенных пружин с заданной жесткостью (фиг.3).
Передние 13, 14 и задние 15, 16 ведущие полуоси шагающих движителей 2, 3 (фиг.4) связаны самоблокирующимися симметричными дифференциалами 17, 18 и жестко соединены с соответствующими кривошипами 7.
Передний 17 и задний 18 самоблокирующиеся симметричные дифференциалы образованы симметричными дифференциалами 19, 20, шестернями 21, 22, 23, 24, 25, 26, 27, 28 и ведущими полуосями 13, 14, 15, 16 кривошипов 7 (фиг.2), вставленными друг в друга (фиг.5) и имеющими зубья, два из которых на одной из ведущих полуосей переднего и заднего движителей нарезаны с угловым шагом:
где
Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, yB1, xB2, yB2 - координаты точек входа и выхода башмака (фиг.2) из фазы взаимодействия с грунтом O-O;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну.
На корпусе 1 (фиг.1) установлен микропроцессорный блок управления 29 (фиг.4), к входам которого подключены абсолютные энкодеры 30, 31, 32, 33, расположенные на полуосях симметричных дифференциалов 19, 20, а к выходам - двигатель 4 силового привода и электромагниты 34, 35, 36, 37 тормозных устройств 38, 39, распложенных на ведущих полуосях 13, 14, 15, 16 кривошипов 7 (фиг.2). На корпусе 1 установлен многоуровневый источник электропитания 40, к которому подключен микропроцессорный блок управления.
Работает шагающая опора следующим образом. Шагающие движители правого и левого бортов поочередно совершают движение, соответствующее фазе опоры O-O на грунт башмака 12 (фиг.2) и фазе его переноса с ускорением и последующим торможением.
Крутящий момент от двигателя 4 подводится к кривошипам 7 передних 2 и задних движителей 3 (как показано на фиг.4) через редуктор 5 и самоблокирующиеся симметричные дифференциалы 17, 18.
Например, рассмотрим движение из состояния покоя - движители правого борта шагающей опоры находятся в начале фазы взаимодействия с грунтом O-O (XB1, YB1), а движители левого борта - на конечном участке фазы ускоренного переноса - торможения. В этой ситуации самоблокирующиеся симметричные дифференциалы 17, 18 заблокированы, так как зубья ведущих полуосей 13, 15 движителей левого борта будут воздействовать на зубья ведущих полуосей 14, 16 движителей правого борта, при этом кривошипы 7 движителей правого борта оказываются сдвинуты на угол Δα (фиг.5) относительно кривошипов 7 левого борта. Требуемый угловой шаг Δα для нарезания зубьев на ведущих полуосях 13, 15, который определяет момент и продолжительность блокировки для заданной траектории башмаков 12 (фиг.2) симметричных дифференциалов 19 и 20 парных движителей 2, 3, рассчитывается по формуле:

где
Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, yB1, xB2, yB2 - координаты точек входа и выхода башмака (фиг.2) из фазы взаимодействия с грунтом O-O;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну.
Шаг Δα определяет момент и продолжительность блокировки симметричных дифференциалов 19, 20, что в свою очередь гарантирует вход в опорную фазу в точке (XB1, YB1), а выход - в точке (XB2, YB2). При угловом шаге зубьев Δα ведущих полуосей 13, 15, рассчитанном по вышеприведенной формуле, соответствующему прямолинейному опорному участку O-O, приседание машины отсутствует.
Крутящий момент будет подводиться к парным движителям правого и левого борта, как к одному целому, что приведет к вращению кривошипов 7 парных движителей, которые в свою очередь приведут в движение криволинейные опоры 8, заставляя перемещаться башмаки 12 по относительной траектории (фиг.2) посредством секционной пружины 9, направляющей 11 и нагрузочного устройства 10, перемещающегося по ней.
В относительном движении башмаки 12 правого борта будут двигаться по прямым участкам O-O, реализуемым благодаря нагружаемым участкам О′-О′ направляющих 11, необходимая форма которых определяется из системы уравнений:
где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок относительной траектории башмака;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры,
а башмаки 12 левого борта - по той же самой траектории, но с запаздыванием на Δα. В крайнем левом положении башмаков 12 правого борта (XB2, YB2) на участке O-O самоблокирующиеся симметричные дифференциалы 17, 18 начнут разблокироваться и большая часть крутящего момента будет подводиться именно на движители правого борта, тем самым сообщая им ускоренное движение в фазе переноса. К моменту начала разблокировки самоблокирующихся симметричных дифференциалов 17, 18, движители левого борта уже будут находиться в фазе взаимодействия с грунтом. Скорость машины при разблокированных дифференциалах снижается.
Полуоси каждого согласующего самоблокирующегося симметричного дифференциала 17, 18 оснащены парой тормозных (регулирующих) устройств 38, 39, так как в процессе движения машины может возникнуть ситуация анормальной работы шагающих движителей, когда движители, находящиеся в фазе взаимодействия с грунтом, начнут переходить в фазу ускоренного переноса (XB2, YB2), а движители, находящиеся в фазе переноса, не успеют оказаться в начале фазы (XB1, YB1) взаимодействия с грунтом (участок O-O). Анализируя информацию о местоположении движителей и угловых скоростях кривошипов 7, поступающую на входы от абсолютных энкодеров 30, 31, 32, 33, микропроцессорный блок 29 генерирует сигналы, управляющие исполнительными электромагнитами 34, 35, 36, 37 тормозных устройств 38, 39 и двигателем 4 силового привода, подаваемые на выходы. Микропроцессорный блок определяет необходимую величину и продолжительность действия тормозных моментов, подводимых к кривошипам 7 движителей, которые находятся в фазе взаимодействия с грунтом, и моменты включения (отключения) двигателя 4, тем самым предупреждая анормальный режим работы движителей - приседание шагающей машины, и к кривошипам 7 движителей, находящимся на участке торможения, исключая явления удара в блокирующих устройствах (фиг.5).
При достижении шагающими движителями правого борта участка торможения включаются соответствующие тормозные устройства 38, 39, которые сравняют угловые скорости кривошипов этих движителей с угловыми скоростями кривошипов движителей левого борта, до момента блокировки. Момент блокировки наступает при разности углов кривошипов парных движителей, равной Δα. После блокировки цикл работы движителей повторяется, но только теперь в фазе взаимодействия с грунтом будут находиться движители левого борта, причем в момент блокировки башмаки левого борта могут быть в любом месте прямолинейного участка O-O.
Т.е. из-за наличия прямолинейного опорного участка у относительной траектории башмаков 12, реализуемой новой конструкцией шагающих движителей, и своевременной смены парных движителей 2, 3, реализуемой самоблокирующимися симметричными дифференциалами 17, 18, и микропроцессорной системой управления, приседание машины в процессе движения и при смене парных движителей 2, 3 отсутствует, что значительно снижает энергоемкость силового привода.
Применяемая новая конструкция передних 2 и задних 3 четырехзвенных шагающих движителей с криволинейной опорой 8, шарнирно соединенной с секционной пружиной 9, свободный конец которой шарнирно прикреплен к корпусу 1, и нагрузочным устройством 10, представляющим собой пару радиально-упорных подшипников, посажанных на одну ось, которые расположены в направляющей 11, выполненной в виде криволинейного контура, жестко закрепленной на корпусе 1 с формой нагружаемого участка О′-О′, описываемой системой уравнений
где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры,
позволяет преодолевать шагающей опоре большие препятствия, что значительно повышает ее проходимость.
Отсутствие таких деталей и элементов (по сравнению с прототипом), как левой и правой полумуфты с упорами, подшипников скольжения со ступенчатым профилем, шпонок и упругих элементов, упрощает конструкцию самоблокирующихся симметричных дифференциалов 17, 18, так как они образованы симметричными дифференциалами 19, 20, передними 13, 14 и задними 15, 16 ведущими полуосями, которые входят друг в друга и имеют зубья, два из которых на одной из полуосей 13, 15 передних 2 и задних 3 движителей нарезаны с угловым шагом:

где
Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, yB1, xB2, yB2 - координаты точек входа и выхода башмака из фазы взаимодействия с грунтом;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну.
Наличие самоадаптирующихся независимых башмаков 12 передних 2 и задних 3 движителей с введением задних ведущих полуосей 15, 16, передающих крутящий момент от двигателя 4 через редуктор 5 к жестко связанным с ними кривошипам 7 задних шагающих движителей 3, и наличие дифференциальной связи между задними полуосями 15, 16, реализуемой задним симметричным дифференциалом 20, позволяет улучшить адаптацию стоп 12 к профилю грунта и препятствиям, что в свою очередь повышает проходимость шагающей опоры.
Изготовление направляющей 11 (фиг.2) реализуется следующим образом. Листовая сталь соответствующей толщины по контурам будущей направляющей 11 разделяется на три части. Средняя листовая часть изымается, а внутренняя и внешняя используются для образования дорожки, по которой будет ходить нагрузочное устройство 10. Процесс резки может быть осуществлен:
1. Фрезерным станком с числовым программным управлением, в который вводится конфигурация требуемых контуров направляющей в виде массива координат - математическая информация о траектории движения механической фрезы, причем контуры направляющей, определяющие его опорный участок О′-O′ для нагрузочного узла 10, режутся согласно системе уравнений:
где
xB и yB - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fc - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры.
2. Станком с числовым программным управлением лазерной кройки листового металла.
3. Высверливанием по наклеенному бумажному шаблону контуров направляющей в листовой заготовке с последующей чистовой обработкой поверхностей качения нагрузочного устройства 10.
Таким образом, вышеизложенные сведения об изобретении свидетельствуют о том, что шагающая опора предназначена для универсального применения в транспортных средствах повышенной проходимости и в сельском хозяйстве, в частности, для многоопорных технологических комплексов, работающих как позиционно, так и в непрерывном движении, причем наличие прямолинейного опорного участка у относительной траектории башмаков, реализуемой новой конструкцией шагающих движителей, и своевременной смены парных движителей, реализуемой новыми самоблокирующимися дифференциалами и микропроцессорной системой управления, значительно снижает энергоемкость силового привода и повышает проходимость шагающей опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2191131C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |



Изобретение относится к транспортным средствам повышенной проходимости. Шагающая опора содержит корпус с побортно установленными на нем двумя передними и двумя задними шагающими движителями, силовой привод, передние и задние ведущие полуоси. Шагающие движители, выполненные в виде шарнирных четырехзвенников, содержат криволинейные опоры, снабженные башмаками и шарнирно связанные с кривошипами. Передние ведущие полуоси, соединенные симметричным дифференциалом, жестко связаны с кривошипами передних шагающих движителей и снабжены передним самоблокирующимся симметричным дифференциалом. Задние ведущие полуоси жестко связаны с кривошипами задних шагающих движителей и соединены задним симметричным дифференциалом. Ведущие передние и задние полуоси входят друг в друга, образуя вместе с симметричными дифференциалами передний и задний самоблокирующиеся симметричные дифференциалы, и имеют зубья, два из которых на одной из полуосей переднего и заднего движителей нарезаны с угловым шагом. Шагающая опора снабжена микропроцессорным блоком управления, абсолютными энкодерами, электромагнитами, источником электропитания, к которому подсоединен микропроцессорный блок управления. Энкодеры подключены к входам микропроцессорного блока и расположены на полуосях симметричных дифференциалов. Электромагниты подсоединены к выходам блока, имеют силовую связь с тормозными устройствами и расположены на полуосях шагающих движителей. Двигатель силового привода подключен к выходу микропроцессорного блока управления. Каждая криволинейная опора передних и задних шагающих движителей шарнирно соединена с секционной пружиной и нагрузочным устройством. Свободный конец секционной пружины шарнирно прикреплен к корпусу. Нагрузочное устройство представляет собой пару радиально-упорных подшипников, посажанных на одну ось. Подшипники расположены в направляющей, выполненной в виде криволинейного контура, жестко закрепленной на корпусе с формой нагружаемого участка. Достигается снижение энергоемкости силового привода и значительное повышение проходимости шагающей машины. 6 ил.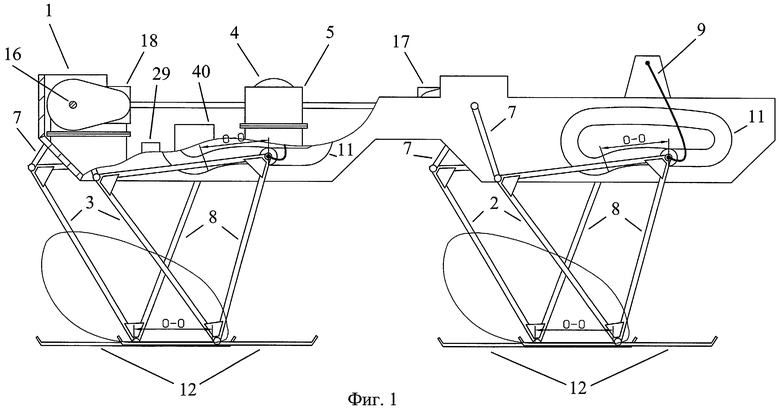
Шагающая опора для многоопорных самоходных машин и для транспортных средств повышенной проходимости, содержащая корпус с побортно установленными на нем двумя передними и двумя задними шагающими движителями, силовой привод, а также передние ведущие полуоси, соединенные симметричным дифференциалом, шагающие движители, выполненные в виде шарнирных четырехзвенников, расположенных в вертикальной плоскости, содержащие криволинейные опоры, снабженные башмаками и шарнирно связанные с кривошипами, передние ведущие полуоси, жестко связанные с кривошипами передних шагающих движителей, и снабженных передним самоблокирующимся симметричным дифференциалом, отличающаяся тем, что она снабжена задними ведущими полуосями, жестко связанными с кривошипами задних шагающих движителей и соединенными задним симметричным дифференциалом, причем ведущие передние и задние полуоси входят друг в друга, образуя вместе с симметричными дифференциалами передний и задний самоблокирующиеся симметричные дифференциалы, и имеют зубья, два из которых на одной из полуосей переднего и заднего движителей нарезаны с угловым шагом:
где Δα - угловой шаг нарезаемых зубьев, разность фаз парных кривошипов;
r - радиус кривошипа;
xB1, уВ1, xB2 , уВ2 - координаты точек входа и выхода башмака из фазы взаимодействия с грунтом;
ρ3 - расстояние между точкой крепления кривошипа к шатуну и точкой крепления башмака к шатуну,
причем шагающая опора снабжена микропроцессорным блоком управления, установленным на корпусе, абсолютными энкодерами, подключенными к входам микропроцессорного блока и расположенными на полуосях симметричных дифференциалов, электромагнитами, подсоединенными к выходам, имеющими силовую связь с тормозными устройствами, расположенными на полуосях шагающих движителей, источником электропитания, установленным на корпусе, к которому подсоединен микропроцессорный блок управления, а двигатель силового привода подключен к выходу микропроцессорного блока управления и каждая криволинейная опора передних и задних шагающих движителей шарнирно соединена с секционной пружиной, свободный конец которой шарнирно прикреплен к корпусу, и нагрузочным устройством, представляющим собой пару радиально-упорных подшипников, посаженных на одну ось, которые расположены в направляющей, выполненной в виде криволинейного контура, жестко закрепленной на корпусе с формой нагружаемого участка, описываемой системой уравнений

где xB и уВ - координаты центра нагрузочного устройства;
r - радиус кривошипа;
ρ1 - расстояние между центром крепления кривошипа к шатуну и центром крепления нагрузочного узла к шатуну;
ρ3 - расстояние между центром крепления кривошипа к шатуну и центром крепления башмака к шатуну;
fC - уравнение кривой, в частности прямой, проходящей через опорный участок;
α - угол, определяющий положение кривошипа;
γ - угол между элементами конструкции криволинейной опоры.
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| US 4202423 A, 13.05.1980 | |||
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| US 2942676 A, 28.06.1960 | |||
| WO 9529836 A1, 09.11.1995 | |||
| Шагающая опора | 1973 |
|
SU523830A1 |

