Область техники
Заявляемое изобретение относится к области шарнирных механизмов и реализует преобразование энергии потока ветра в энергию поступательного перемещения корпуса шагающего аппарата. Оно может быть использовано в конструкциях роботов (шагающих аппаратов), а также в транспортной сфере и сельском хозяйстве для движения по пересеченной местности при наличии препятствий.
Уровень техники
Из публикации US 6260862 B1 известен шестизвенный шарнирный механизм Кланна, реализующий приближённое к прямолинейному движение, схожее с фазой шага у насекомых. Устройство включает раму с разнесенными осевыми опорами, стойку, соединенные в осевом направлении верхнее и нижнее коромысла, ограничивающие возвратно-поступательное движение ноги. Нога приводится в движение соединительным рычагом, приводимым, в свою очередь, в действие вращающимся кривошипом. Положение и конфигурация осевых соединительных узлов задают перемещение, которое стопа совершает при каждом обороте кривошипа. Оба коромысла и кривошип закреплены на раме в осевом направлении. Вращение кривошипа передается на соединительный рычаг, заставляя ногу двигаться в дугообразном возвратно-поступательном движении по ограниченному дугообразному пути, что имитирует походку животного с ногами. Шагающее устройство может приводиться в действие вручную или быть моторизовано за счет подачи моторизованной мощности на кривошипные оси.
Ключевым недостатком этого механизма являются большое горизонтальное ускорение опорного звена на прямолинейном участке, что приводит к резкости при движении шагающего аппарата, а также повышению износа деталей.
Известен также механизм Тео Янсена, состоящий из 11 звеньев и приближающий прямолинейное движение (https://www.strandbeest.com/). Основным преимуществом этого механизма является плавность поступательного движения. На базе данного механизма были разработаны шагающие аппараты, которые используют энергию ветра для перемещения. Известные аппараты передвигаются в направлении ветра, используя паруса, а также перпендикулярно потоку, посредством использования пропеллера (https://www.strandbeest.com/shop/a-animaris-ordis-parvus).
Главным недостатком представленных аппаратов является высокая сложность изготовления и сборки из-за большого количества элементов, а также отсутствие возможности движения такого аппарата против ветра.
Наиболее близкой по технической сущности к заявленному изобретению является стопоходящая машина Чебышёва, содержащая 4 трёхзвенных лямбда-механизма, каждый из которых имитирует движение копыта лошади (описание этого механизма приведено в книге: Полное собрание сочинений П.Л. Чебышева. Том. 4. Теория механизмов. - Москва-Ленинград: Издательство Академии наук СССР, 1948 г. - С. 165). Устройство имеет два синхронно вращающихся вала, на концах которых закреплены кривошипы лямбда-механизмов. Оно может приводится в движение с помощью мотора, либо механическим воздействием на корпус и не предусматривает движения за счёт энергии ветра. Помимо этого, конструкция устройства допускает упрощение, которое сохраняет основные кинематические свойства, но уменьшает общее число звеньев.
Вышеприведенные решения характеризуются следующими недостатками: большое число звеньев механизма, что снижает прочность конструкции и надежность эксплуатации, а также отсутствие возможности перемещения против встречного потока ветра.
Техническая проблема, решаемая посредством заявляемого изобретения, заключается в необходимости преодоления недостатков, присущих вышеперечисленным аналогам, за счет создания устройства, обеспечивающего возможность преобразования энергии встречного воздушного потока в движение шагающего аппарата.
Краткое раскрытие сущности изобретения
Технический результат, достигаемый при использовании заявляемого изобретения, заключается в обеспечении возможности движения шагающего аппарата навстречу набегающему воздушному потоку при упрощении его конструкции в результате сокращения количества звеньев шарнирного шагающего аппарата.
Заявленный технический результат достигается тем, что устройство для преобразования возобновляемой энергии в энергию движения шагающего аппарата, содержащее
- прямоугольный корпус,
- приводной вал, установленный на нём с возможностью вращения,
- по меньшей мере, четыре лямбда-механизма, шатуны которых шарнирно закреплены по углам корпуса, а кривошипы закреплены к концам приводного вала,
- по меньшей мере, четыре голени, представляющие собой прямые звенья с плоской платформой на одном конце и шарниром, соединённым со свободным звеном лямбда-механизма, на другом конце, снабжено червячным колесом, установленным в корпусе и закреплённым на приводном валу, при этом червячное колесо сопряжено с пропеллерным валом, размещённым ортогонально приводному валу и имеющим участок с трапецеидальной резьбой, на конце пропеллерного вала закреплен пропеллер, а по обе стороны от пропеллерного вала установлены две опорные стойки, при этом лямбда-механизмы попарно имеют общий кривошип, совмещенный с концом приводного вала. Отношение радиуса пропеллера (Rп) к радиусу кривошипа (Rк) составляет от 3Rк до 5Rк. Передаточное число червячной передачи, включающей червячное колесо, сопряженное с пропеллерным валом, составляет от 20 до 80.
Ориентация лопастей пропеллера выбрана таким образом, что под действием набегающего воздушного потока направление вращения вала пропеллера после передачи на вал с червячным колесом обеспечивает перестановку голеней, при которой корпус механизма перемещается в сторону потока ветра.
За счёт установки червячной пары, включающей червячное колесо и сопряженный с ним пропеллерный вал, при передаче вращения с пропеллерного вала на приводной вал достигается изменение направления угловой скорости на 90°, а также её понижение. Таким образом обеспечивается необходимый баланс между аэродинамическими силами, формирующими момент, действующий на пропеллер, и аэродинамической силой лобового сопротивления, действующей на механизм, в результате этого поддерживается движение устройства против ветра.
Дополнительное увеличение эффективности устройства достигается также за счет того, что оно, по сравнению со стопоходящей машиной Чебышёва имеет два кривошипа, размещённых на одном валу, а не четыре, попарно размещённые на двух, синхронно вращающихся валах. Это позволяет снизить сложность изготовления устройства, а также уменьшить суммарное трение в системе и вероятность заклинивания. Таким образом, возрастают надежность и прочность.
Максимальная скорость устройства достигается, когда радиус пропеллера примерно в 3-5 раз превосходит радиус кривошипов лямбда-механизмов, а передаточное число червячной пары примерно равно 20-30, что подтверждено математическим моделированием.
Краткое описание чертежей
Сущность заявляемого изобретения поясняется следующими изображениями, где
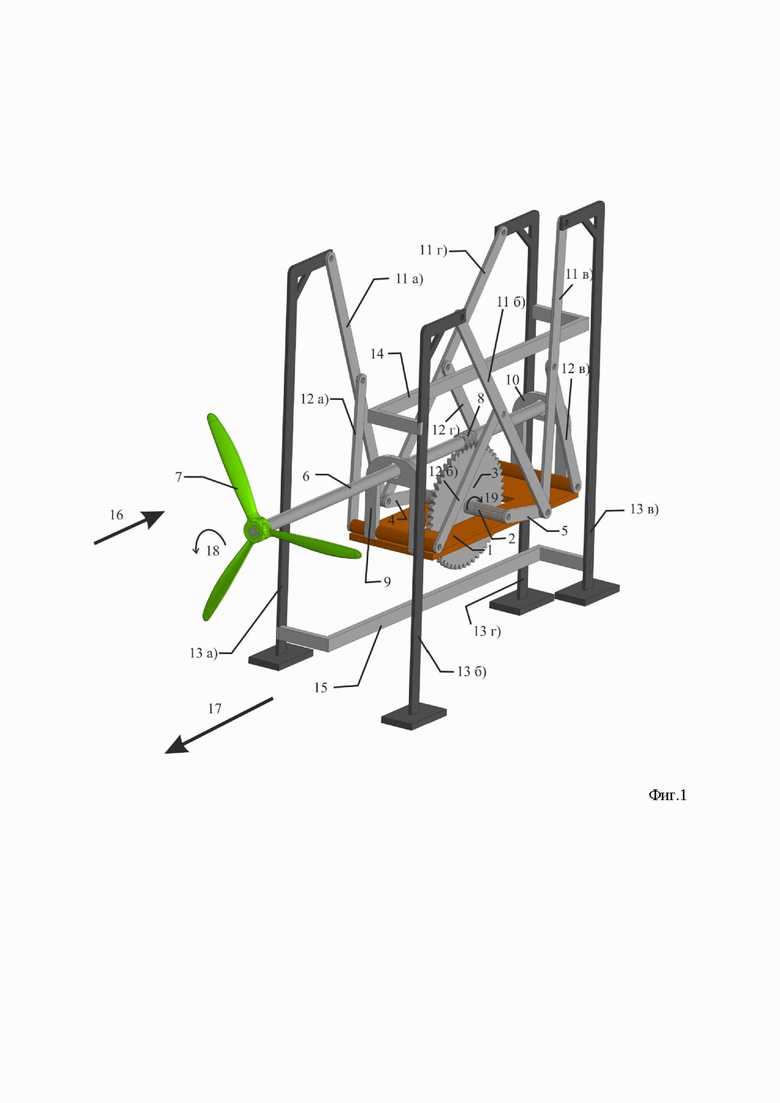
на фиг. 1 схематично изображен общий вид заявляемого устройства,
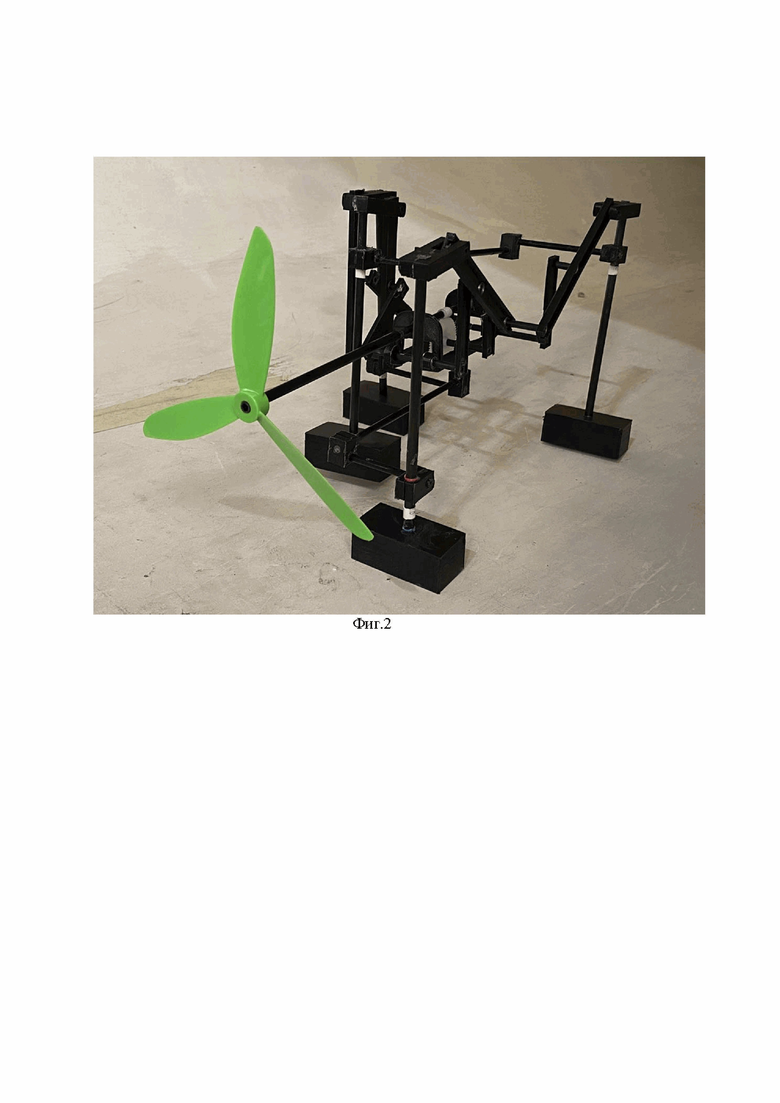
на фиг. 2 представлено фото макета заявляемого изобретения.
Позициями на чертежах обозначены:
1) Корпус,
2) Приводной вал,
3) Червячное колесо,
4) Правый кривошип,
5) Левый кривошип,
6) Пропеллерный вал,
7) Пропеллер,
8) Винт с трапецеидальной резьбой,
9) Передняя стойка,
10) Задняя стойка,
11) Рычаги лямбда-механизмов,
12) Шатуны лямбда-механизмов,
13) Голени,
14) Верхнее соединение голеней,
15) Нижнее соединение голеней,
16) Направление воздушного потока,
17) Направление движения заявляемого устройства,
18) Направление вращения пропеллера,
19) Направление вращения вала кривошипов.
Осуществление изобретения
Заявляемое устройство относится к области шарнирных механизмов и реализует преобразование энергии потока ветра в энергию поступательного перемещения шагающего аппарата. Оно может быть использовано в транспортной сфере и сельском хозяйстве для движения по пересеченной местности при наличии препятствий.
Устройство включает корпус 1, представляющий собой прямоугольную платформу с прорезью посередине и отверстиями по периметру для установки элементов механизма. Устройство включает также приводной вал 2, на котором в прорези корпуса установлено червячное колесо 3, а к концам приводного вала закреплены правый кривошип 4 и левый кривошип 5. Каждый кривошип является общим для пары лямбда-механизмов, расположенных по одну сторону корпуса (справа или слева, соответственно).
Червячное колесо сопряжено с пропеллерным валом 6, расположенным ортогонально приводному валу. Вал 6 установлен в отверстиях опорных стоек 9 и 10, закрепленных на торцах корпуса (в передней и задней части). На валу 6 закреплён трёхлопастный пропеллер пропеллер 7, длина лопастей которого в опытном образце выбрана равной 7,62 см, и винт с трапецеидальной резьбой 8, через который вал 6 сопряжен с червячным колесом. Диапазон возможного передаточного числа довольно широкий. Для реализации движения достаточно значения 20 и выше (20-80). При этом чем больше передаточное число, тем ниже скорость движения. Наиболее оптимальным является значение передаточного числа более 40. Такое значение позволяет снизить нагрузку на червячный редуктор. Четыре лямбда-механизма образованы четырьмя рычагами 11 а-г), сочленённые нижними концами с кривошипами (правым и левым), четырьмя шатунами 12 а-г), нижние концы которых шарнирно закреплены на корпусе в углах образующей его платформы, а верхние сочленены с центральными отверстиями рычагов.
Устройство также включает четыре шагающие голени 13 а-г), шарнирно прикреплённые к верхним концам рычагов и выполненные в виде Г-образных элементов с плоской опорной платформой в нижней части. Голени соединены между собой диагонально посредством верхнего и нижнего сочленения 14, 15. Стрелкой 16 на фиг.1 указано направление набегающего потока воздуха, а стрелкой 17 - направление движения устройства. Дуговыми стрелками 18, 19 обозначены направления вращения вала пропеллера и вала кривошипов.
Заявляемое устройство работает следующим образом.
Устройство размещают на твёрдой горизонтальной поверхности и ориентируют пропеллером в сторону встречного ветра так, чтобы, осевая линия вала пропеллера была направлена вдоль вектора скорости ветра (в данном случае возможно небольшое отклонение от указанного расположения с погрешностью 5-10° без влияния на степень эффективности работы устройства). Под действием набегающего потока воздуха 16 пропеллер 6 начинает вращаться в направлении 18 и передавать вращение через червячное колесо приводному валу в направлении 19. Указанное вращение обеспечивает движение лямбда-механизмов и, соответственно, поочерёдную перестановку голеней в направлении 17, в результате которой устройство движется по направлению 17 с возрастающей средней за полный оборот вала кривошипов угловой скоростью.
Этот принцип увеличения угловых скоростей пропеллера 6, валов 2, 5 и скорости движения корпуса 1 работает, пока абсолютные значения угловых скоростей пропеллера 6 и валов 2, 5 не станут настолько большими, что момент создаваемый силами аэродинамического сопротивления и приложенный к приводному валу 2, компенсирует аэродинамический момент, раскручивающий пропеллер 6. Соответствующие пограничные значения угловой скорости пропеллера 6 и скорости корпуса 1 будут характерны для самоподдерживающегося режима движения устройства.
Пример конкретного выполнения
Изготовлен опытный макет заявляемого устройства (фиг.2). Корпус, составляющие лямбда-механизмов, передняя и задняя стойки выполнены из PLA-пластика (может быть использован другой материал, например, древесина или композитные материалы). Длина корпуса 82 мм, ширина - 30 мм, высота (с учётом стоек) - 35 мм. Валы и сочленения звеньев лямбда-механизмов выполнены из карбоновых трубок внешним диаметром 4 мм и внутренним 2 мм. Длина приводного вала - 44 мм, вала пропеллера - 160 мм. Расстояние между посадочными отверстиями составляет, соответственно, 18 мм у кривошипов, 45 мм у шатунов и рычагов. Расстояние между осью приводного вала и центрами крепления шатунов на корпусе равно 36 мм. Голени устройства выполнены из углеродных трубок с внешним диаметром 5 мм, внутренним диаметром 3 мм и длинной 145 мм. Пропеллер изготовлен из пластика, и имеет три лопасти длиной 7,62 мм. Червячное колесо и трапецеидальный винт изготовлены из пластика и составляют червячую пару с передаточным числом 52.
Эксперименты проводились в НИИ механики МГУ при скорости потока воздуха 10-15 м/c. Стабильно наблюдался самоподдерживающийся режим движения механизма в потоке против ветра со скоростью 2-5 см/с. Таким образом, экспериментально было подтверждено, что предлагаемое устройство работоспособно и при сравнительно небольших габаритах обеспечивает надежное и эффективное преобразование возобновляемой энергии ветра в механическую энергию движения корпуса при встречном движении воздушного потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГИИ | 2016 |
|
RU2641176C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СКОРОСТНОГО НАПОРА ВЕТРА И ВЕТРОУСТАНОВКА | 1992 |
|
RU2109981C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГИИ | 2005 |
|
RU2293212C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2095269C1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Опора шагающего транспортного средства | 1976 |
|
SU716898A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ТЕКУЧЕЙ СРЕДЫ В ПОЛЕЗНУЮ РАБОТУ И УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ТЕКУЧЕЙ СРЕДЫ В ПОЛЕЗНУЮ РАБОТУ | 2010 |
|
RU2478830C2 |
Изобретение относится к области шарнирных механизмов и реализует преобразование энергии потока ветра в энергию поступательного перемещения корпуса шагающего аппарата. Устройство для преобразования возобновляемой энергии в энергию движения шагающего аппарата содержит прямоугольный корпус, приводной вал, установленный на нём с возможностью вращения, четыре лямбда-механизма. Шатуны лямбда-механизмов шарнирно закреплены по углам корпуса. Кривошипы закреплены к концам приводного вала. Четыре голени представляют собой прямые звенья с плоской платформой на одном конце и шарниром, соединённым со свободным звеном лямбда-механизма, на другом конце. Червячное колесо установлено в корпусе и закреплено на приводном валу. Червячное колесо сопряжено с пропеллерным валом, размещённым ортогонально приводному валу и имеющим участок с трапецеидальной резьбой. На конце пропеллерного вала закреплен пропеллер. По обе стороны от пропеллерного вала установлены две опорные стойки. Лямбда-механизмы попарно имеют общий кривошип, совмещенный с концом приводного вала. Технический результат заключается в обеспечении возможности движения шагающего аппарата навстречу набегающему воздушному потоку при упрощении его конструкции в результате сокращения количества звеньев шарнирного шагающего аппарата. 2 з.п. ф-лы, 2 ил.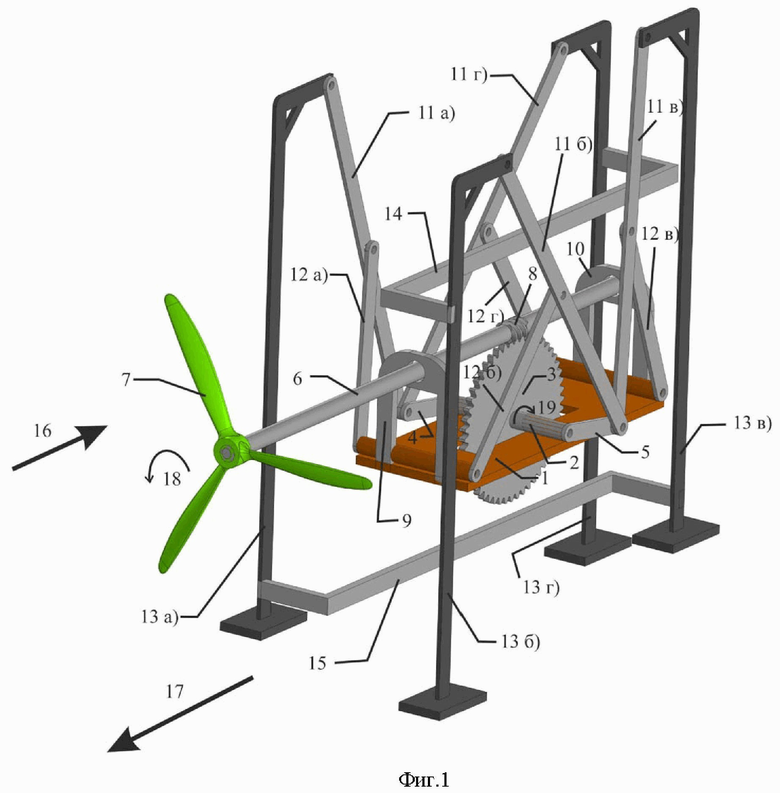
1. Устройство для преобразования возобновляемой энергии в энергию движения шагающего аппарата, содержащее
- прямоугольный корпус,
- приводной вал, установленный на нём с возможностью вращения,
- по меньшей мере четыре лямбда-механизма, шатуны которых шарнирно закреплены по углам корпуса, а кривошипы закреплены к концам приводного вала,
- по меньшей мере четыре голени, представляющие собой прямые звенья с плоской платформой на одном конце и шарниром, соединённым со свободным звеном лямбда-механизма, на другом конце, отличающееся тем, что оно снабжено червячным колесом, установленным в корпусе и закреплённым на приводном валу, при этом червячное колесо сопряжено с пропеллерным валом, размещённым ортогонально приводному валу и имеющим участок с трапецеидальной резьбой, на конце пропеллерного вала закреплен пропеллер, а по обе стороны от пропеллерного вала установлены две опорные стойки, при этом лямбда-механизмы попарно имеют общий кривошип, совмещенный с концом приводного вала.
2. Устройство по п.1, отличающееся тем, что отношение радиуса пропеллера (Rп) к радиусу кривошипа (Rк) составляет от 3Rк до 5Rк.
3. Устройство по п.1, отличающееся тем, что передаточное число червячной передачи, включающей червячное колесо, сопряженное с пропеллерным валом, составляет от 20 до 80.
| CN 212971292 U, 16.04.2021 | |||
| CN 113882743 A, 04.01.2022 | |||
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| WO 2020088146 A1, 07.05.2020 | |||
| KR 102114331 B1, 22.05.2020. | |||

