Изобретение относится к области мускульно-машинных систем, использующих накопление и отдачу энергии упругих, в том числе мускульных, сил и инерцию движения. Предназначено для передвижения и тренажа, в частности, на самокате, в том числе санях и т.п. простейших инерционных движителях: передвигающихся по инерции после толчка.
Известен мускульно-инерционный опоропоследовательный способ передвижения и тренажа - плавания на опорах инерционного движения: ластах, поясах, "панцирях" и т.п. ложементах, - использующий тело пловца и как природное последовательное упругое соединение опор, и как природный двигатель, приводимый силой упругости мышц, где опоры перемещаются размещенными на них частями тела пользователя последовательно-поочередно, каковая, пространственно-временная, последовательность опор - опоропоследовательность - и образует опоропоследовательный способ передвижения.
Известен самокат И.П.Святкина, как реализация мускульно-пружинно-инерционного опоропоследовательного способа передвижения и тренажа: детский с седлом на пружинящей стойке, с помощью которой ездок в прямом, движущем, ходе двигательного цикла толчком ног о землю и движением туловища с седлом вперед переводит силы мускульную и пружинную - упругие - в инерцию движения седла - опоры, действующей в пределах другой опоры: рамы самоката - и самой рамы. Ее подталкивает вперед затем пружинная сила первой опоры - седла. Здесь нет пространственной последовательности опор, но есть временная: очередность ввода их в действие. Необходимость отталкивания ногами от земли, однако, ставит под сомнение понятие "самокат", снижает комфортность передвижения. Торможение же, неизбежное при касании ногами земли, в прямом ходе двигательного цикла и при движении туловища с седлом назад, в обратном ходе, в дополнение к слишком тесной взаимозависимости опор, влечет ослабление инерции движения и не позволяет развить скорость существенно выше 15 км/ч (Техника молодежи, 1968, № 4, с.27).
Также известно устройство с санным инерционным движителем, используемое в пружинно-инерционном опоропоследовательном способе передвижения, заключающемся в том, что толчком, возникающим от генератора механических импульсов при движении неуравновешенной массы, создают ход передней опоры, а задняя подтягивается к ней растянутою в первом ходе пружиной между опорами [1]. Грунтозацеп, преодолевающий отдачу пружины, волочащийся по земле, однако, снижает скорость, генератор снижает плавность, легкость, тишину хода, мускульная же сила седока используется, в основном, для поворота.
Прототипом предлагаемого можно считать устройство, реализующее мускульно-пружинно-инерционный опоропоследовательный способ передвижения и тренажа, основанный на том, что, используя мышечную упругость, толкают частью тела ездока - туловищем - вперед одну и ту же из несущих его связанных упругим соединением - пружиной - опор колесного инерционного движителя с приспособлениями для преодоления сопротивления системы, в том числе отдачи, другую же опору, в пределах которой движется та, толкает, вперед же, сжатая тем толчком пружина, в каждом двигательном цикле, в продольном направлении, в направлении движения. При этом после прямого хода туловище со своей опорой совершает обратный ход, назад, как и в самокате Святкина, поэтому и здесь не достаточны скорость, плавность, легкость хода. Еще и ввиду той же, слишком тесной, взаимозависимости опор из-за отсутствия их пространственной последовательности, наличия лишь временной [2].
Задачей предлагаемого изобретения является повышение скорости, комфортности и тренажности движения на основе упругих, в т.ч. мускульных, сил с устранением тормозящих факторов, в частности касания ногами земли и обратного хода туловища, благодаря освобождению опор от слишком тесной взаимозависимости с использованием не только временной, но и пространственной опоропоследовательности, освобождающей инерцию движения тела ездока и машины, и сложению природных и технических упругих деформаций, с включением, по возможности, противоположных упругих деформаций и инерционно-колебательного эффекта.
Для этого на одну из опор инерционного движения: движителей, ложементов или т.п.,- связанных последовательно пружиной - упругим соединением, работающим в продольном направлении в упругих деформациях: растяжения и/или сжатия, и/или изгиба (пружина-пластина) и т.п.,- помещают одну часть тела пользователя, на другую из этих, несущих его, опор - другую его часть, с фиксацией этих частей на опорах. В каждом двигательном цикле этими частями тела перемещают опоры последовательно-поочередно в продольном направлении, в направлении движения, причем перед перемещением опоры создают дополнительное давление на землю, среду другой опоры, частью тела на ней, при сохранении качественного инерционного состояния этой, последней, опоры, необходимое и достаточное для обретения частью тела на первой опоре способности к ее перемещению, к преодолению упругой деформации соединения опор, сопротивления, отдачи системы, сразу после чего снимают это, дополнительное, давление на землю, среду, до перехода частей сил тяги, трения покоя, трения движения и упругой деформации соединения опор в инерцию движения опор, генерируют тем волну двигательного цикла. Включают таким образом и природное упругое соединение опор: части тела ездока, при ненадобности отталкивания ими непосредственно от земли, пола и т.п. В случае же упругого соединения опор, работающего в противоположных упругих деформациях, растяжения и сжатия, перемещают и ту и другую опоры намеренно-попеременно в каждом двигательном цикле, с использованием и инерции движения, в том числе и инерционно-колебательной природы противоположных упругих деформаций: их взаимопереходов, стимулирующих каждый следующий ход - полуволну двигательного цикла - и каждый следующий двигательный, двухходовой, цикл - волну - "пружинволну".
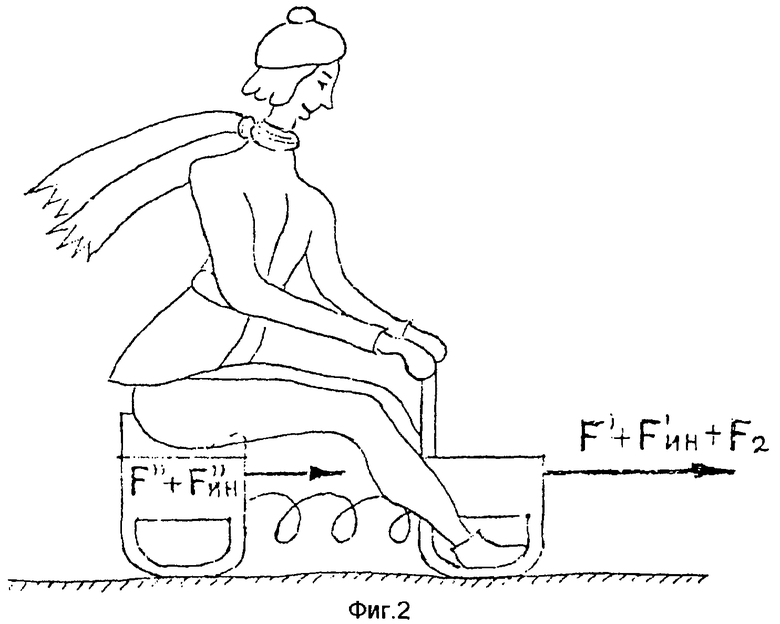
На фиг.1 представлен, в частном воплощении сидячего ездока, первый ход двигательного цикла при работе упругого соединения опор в упругой деформации; на фиг.2 - второй ход двигательного цикла при работе упругого соединения опор в противоположных упругих деформациях. Стрелками показаны некоторые силы, действующие на опоры в направлении движения: в первом ходе на заднюю опору - сила F1 тяги, на переднюю - сумма результирующих сил F' упругой деформации соединения опор и (условно) инерции F'ин (фиг.1). Во втором ходе (фиг.2) к передней опоре приложена последняя сумма сил и сила F2 тяги, а к задней опоре - сумма результирующих сил противоположной той, что в первом ходе, упругой деформации соединения опор F'' и (условно) инерции F''ин. Обе опоры изображены, для частного случая, поставленными на полозья с закруглениями спереди и сзади: или санные, как зимние, для движения по снежной поверхности, так и летние, антифрикционные, для любой дороги, или роликовые, для движения по бесснежной дороге с твердым покрытием (хотя возможны и колесный, и другие варианты).
В представленном на фиг.1 и 2 воплощении предлагаемого способа ездок садится на заднюю опору, руки и/или ноги помещает на переднюю. Опоры выполнены из легкого жесткого материала и связаны пружиной, например спиральной или пневматической ("гармошкой"), или резиновой, или т.п., работающей, как сказано выше, в первом ходе в одной из упругих деформаций, во втором - в противоположной ей, в том же, продольном, направлении. Конечности ездока в первом ходе двигательного цикла слегка прижимают переднюю опору к земле, полу, сохраняя инерционное состояние этой опоры: покоя или движения с близкой скоростью, и туловище тут же толкает заднюю опору вперед с силой тяги F1 (фиг.1), сразу после чего конечности отпускают переднюю опору для ускорения, оставаясь на ней. Благодаря этому сила тяги переходит в (условную) силу инерции задней опоры, а также через пружину - в (условную) силу инерции передней опоры. Последняя сила меньше предпоследней ввиду упругого сжатия пружины. Сила последнего, действующая на заднюю опору в направлении назад, компенсируется вышеозначенной (условной) силой инерции задней опоры, а действующая на переднюю опору в направлении вперед - постепенно, по мере освобождения пружины от сжатия, переходит в (условную) силу инерции передней опоры, которая и складывается с вышеозначенной (условной) силой инерции передней опоры в суммарную (условную) силу F'ин инерции (фиг.1). Туловище и конечности пользователя отдыхают при том же инерционном, скоростном, состоянии движителя. При работе упругого соединения опор лишь в одной из упругих деформаций, растяжения или сжатия, в частности, при недостаточной физической мощи конечностей ездока, он позволяет пружине расслабиться до конца и вышеописанным, первым, ходом завершает очередной двигательный цикл, - одноходовой.
При работе же упругого соединения опор в противоположных упругих деформациях первый ход двигательного цикла заканчивается ранее, не достигая полного расслабления пружины: используется остаточная часть силы F' упругого сжатия, приложенной к передней опоре вперед (фиг.1), не успевшая к концу первого хода перейти в вышеозначенную (условную) силу инерции передней опоры, вместе с суммарной (условной) силой F'ин инерции облегчающая работу конечностей ездока, уже во втором ходе двигательного цикла.
Первый этап второго хода начинается, когда еще не прошло ощущение тяги от пружины в конечностях. Туловище слегка прижимает заднюю опору к земле, полу, сохраняя инерционное состояние этой опоры: (почти) ту же скорость, - и конечности тут же толкают переднюю опору вперед от задней с силой F2 тяги, прибавляя ее к уже действующей в начале второго хода на переднюю опору сумме сил F' + F'ин (фиг.2), сразу после чего туловище отпускает заднюю опору для ускорения, оставаясь на ней. Благодаря этому сумма трех сил, действующая в начале второго хода на переднюю опору, преобразуется в единую (условную) силу инерции передней опоры, а через пружину переходит в (условную) силу инерции задней опоры. Последняя сила меньше предпоследней ввиду растягивания все еще сжатой пружины, что на первом этапе второго хода двигательного цикла и освобождает пружину от предыдущего сжатия. Эти же силы приводят пружину из недеформированного, переходного, между двумя этапами второго хода двигательного цикла, состояния в состояние упругого растяжения, до ограничителя, предохраняющего пружину от перерастяжения (на фиг. 1, 2 не показан).
На втором этапе второго хода двигательного цикла сила упругого растяжения, действующая на переднюю опору назад, компенсируется вышеозначенной (условной) силой инерции передней опоры. Действующая же на заднюю опору, вперед, сила упругого растяжения постепенно, по мере освобождения пружины от растяжения переходит в (условную) силу инерции задней опоры, которая и складывается с уже действующей на заднюю опору (условной) силой инерции в суммарную (условную) силу инерции F''ин (фиг.2). Остаточная часть силы упругого растяжения, приложенной к задней опоре, вперед, F'' (фиг.2), не успевшая к концу второго хода перейти в вышеозначенную (условную) силу инерции задней опоры, вместе с суммарной силой F''ин облегчает работу туловища ездока в первом ходе следующего двигательного цикла, при работе упругого соединения опор в противоположных упругих деформациях: толчок задней опоры вперед, с очередным упругим сжатием соединения опор, стимулируемым, возможно, и тою же, инерционно-колебательной, природой пружины.
С каждым двигательным циклом (условная) сила инерции обеих опор, а с ней и скорость передвижения возрастает за счет прибавления новых составляющих к предыдущим. Сила трения о землю, пол с ростом скорости уменьшается, что облегчает мускульную работу. Наконец, устанавливается более или менее равномерное движение, поддерживаемое теперь минимально необходимыми действиями ездока, компенсирующими и отдачу. Повороты производятся руками и/или ногами, управляющими передней опорой, торможение - посредством, к примеру, (опускных) тормозных "подошв", "башмаков" и т.д. в дополнение к сжатию пружины между опорами толчком передней опоры к задней.
Таким образом, в первой связке причин, имеющих своим следствием повышение скорости, комфортности и тренажности движения, фигурирует устранение из двигательного цикла снижающих скорость и комфортность факторов: обратного хода туловища, касания конечностями или грунтозацепом земли и др., при использовании полноценной пространственно-временной опоропоследовательности, упругого соединения опор, сила упругой деформации которого переходит в инерцию движения и обратно: инерция - в упругую деформацию.
В представленном варианте упруго-инерционного движителя результат достигается в противоположных упругих деформациях, стимулирующих одна другую с учетом инерционно-колебательной природы пружины, позволяющей пользователю и периодически отдыхать, беречь мускульную силу: вводить ее с ощущением тяги в движущих частях тела. Этот отдых входит во вторую связку причин, вызывающих вышеназванное, позитивное следствие. Ведь в том же варианте используется работа практически всего тела ездока: двух групп мышц,- и в каждой из двух частей двигательного цикла нагружена, в основном, только одна из этих групп, другая же, в основном, отдыхает. Такая последовательность создает непрерывно-волновой механизм движения в среднескоростной системе "ездок - машина". Тело ездока получает щадящую нагрузку, наиболее полно, волнообразно, "пружинволною", распространяемую на него лечебно-профилактическую тренировку физиологической, в том числе опорно-позвоночно-двигательной, и нервно-психической, биоэнергетической систем организма, в сидячем, на устойчивых опорах, положении, относительно надежном в смысле безопасности для ездока и окружающих, даже при гололеде, опорно-двигательной, сердечной, мозговой и пр. недостаточностях ездока и т.п. неблагоприятных факторах; при благоприятных же обстоятельствах - с увеличением последних, прежде всего той же скорости передвижения.
Кроме того, предлагаемое устройство в полной мере соответствует понятию "самокат", благодаря освобождению от необходимости отталкивания конечностями от земли, пола и т.п., вместе с еле заметными, плавными движениями ездока. Для описанного здесь самоката характерны простота конструкции с минимумом деталей, без топлива, миниатюрность, легкость опор, позволяющие их переносить "на плече" или, "заперев" пружину в нерабочем, среднем, положении, везти за собой, обходя "транспортные пробки", брать в другой транспорт, общественный или личный, хранить с использованием в квартире, в учреждении, на предприятии, "въезжать" в магазин, сидеть, а не "стоять" в очереди, в вагоне и т.д.
При отсутствии или разрушении технического упругого соединения опор - пружины - движение по предлагаемому способу возможно, хотя и с существенно меньшими скоростью и комфортностью: живое тело ездока, обладая вышеупомянутой природной упругостью и распространяясь на опоры, превращается, как выше сказано, в природное упругое соединение опор, при вышеописанном, штатном, функционировании "параллельное" техническому их соединению, - той же пружине. Сохранение и без нее некоторого, минимально комфортного передвижения важно, в первую очередь, ездокам в сидячем положении в случае "аварии", при вышеупомянутом отказе той самой пружины, соединяющей опоры, в частности, больным, не способным двигаться иным способом. Этот относительно "жесткий", беспружинный, вариант обладает и повышенной тренажностью, благодаря усиленной физической нагрузке при малой скорости, удобной, к тому же, и для малых помещений.
Способ предоставляет возможность тренажа и при нулевой результирующей скорости, создаваемого возвратно-поступательными движениями опор от тягово-толкающих усилий, к примеру, всего тела ездока, размещенного на этих опорах, как с пружиной, так и без нее между ними, в зависимости от состояния здоровья и выбора тренирующегося.
Инвалиды, передвигающиеся и тренирующиеся данным способом, не будут отличаться от других пользователей, что послужит медицинской и социальной реабилитации. Даже и при болезни, отнимающей способность к какому-либо самостоятельному движению: транспортирующий может пользоваться тем же способом, толкая транспортируемого в собственной сидячей езде, подобно другим пользователям и группам их. Так же комфортно, сидя, можно перевозить и малых детей, и животных.
Комфортность, тренажность и скорость передвижения обеспечены предлагаемым способом и инвалиду, больному, имеющему только и хотя бы одну здоровую конечность при (относительно) здоровом позвоночнике: больной может приводить лишь ею, допустим, переднюю опору (после толчка задней туловищем), давая другим, нездоровым, конечностям, помещенным на ту же (переднюю) опору, отдых или пассивно-лечебную тренировку. Наконец, он может самостоятельно спускаться и подниматься по лестнице.
Для подъема предлагается привязать туловище к его опоре, габаритами соразмерной со ступенью, и, опираясь на ступени хотя бы одною, здоровой, конечностью, переносить туловище с его опорой и связанную с ней другую опору с одной ступени на другую. Для спуска или тот же, что для подъема способ, или при опорах на полозьях, к примеру, можно съезжать по лестничному маршу, как по наклонной плоскости, держа упругое соединение опор в сжатом состоянии, - торможения.
Возможная при описанном здесь, выше, штатном способе передвижения "мышечная радость", даже, может быть, с ощущением полета, танца, также послужит укреплению здоровья ездока, тренирующегося, отдыхающего. Способ доступен в любом возрасте, в разных физических состояниях, в любой среде, в т.ч. наземной, водной, воздушной, безвоздушной, по "бездорожью". Круглогодичность способа послужит стимулом и для организации, наконец, в городе вело-самокатных дорожек.
Для ("сидячего", "лежачего") движителя в водной, воздушной или т.п. среде без твердой опоры: лодки, "дирижабля", "амфибии" и т.д. - могут понадобиться и (межопорные) направляющие опор в продольном направлении, заменяющие им общую твердую опору: землю, пол и т.д. Наоборот, наземный движитель может быть упрощен до пружинящих при ударе бамперов на обращенных друг к другу торцах опор и гибкой (шнуровой) связи между опорами, заменяющих пружину, в другом случае до единого, "монолитного", резинового, к примеру, бревна с полозьями, сиденьем и пр. на концах; даже до пружины между последовательными роликовыми досками ("роллерами").
Общеизвестные ложементы конечностей водо- и воздухоплавателя и/или нательные ("панцири" и т.п.) из общеизвестных материалов, веществ легче воды, воздуха и т.д., возможно крыловидного профиля, увеличивающего подъемную силу со скоростью, могут быть для увеличения скорости, высоты траектории передвижения соединены пружинами из относительно мягкого, известного же материала, относительно плавной конфигурации, к примеру, "гармошками" с профилем по кривой типа синусоиды или спиралями, вшитыми в эластичную ткань, допустим, пропускающими конечности внутри себя.
Экологичностью в пользу природы и человека, в т.ч. эффективностью лечебно-профилактического и спортивного тренажа позвоночника (управляющего значительной долей организма), рук, ног, их суставов, всего тела пользователя в разных положениях: сидя, стоя, лежа и т.д.,- скоростью и комфортностью, в т.ч. возможностью перевозить ручные грузы в емкостях опор, поднимать и опускать кожух, защищающий от влаги, холода, солнца, главное же - экономить время регулярным совмещением функций среднескоростного круглогодичного передвижения и тренажа, предлагаемый способ, "пружинволна", его воплощение: "пружиноход", пользователи: "пружиноходцы", "пружиноходец", "пружиноходица", "пружинолётцы", "лётец", "лётица", "пружиноплавцы", "плавец", "плавица" - соединяют в себе достоинства известных способов передвижения и тренажа. Также и в прикладных: трудовых, лечебных, спасательно-оборонных, спортивно-аттракционно-игрушечных и других сферах применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОКАТ | 2012 |
|
RU2520634C1 |
| СКЛАДНОЕ МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2775901C1 |
| СПОСОБ МУСКУЛЬНОГО ПЕРЕДВИЖЕНИЯ | 2014 |
|
RU2558633C1 |
| САМОКАТ | 2019 |
|
RU2711739C1 |
| СПОСОБ МУСКУЛЬНОГО ПЕРЕДВИЖЕНИЯ | 2021 |
|
RU2763084C1 |
| Многофункциональное складное средство для передвижения и развлечений | 2022 |
|
RU2796174C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| МУСКУЛОХОД СКЛАДНОЙ МНОГОФУНКЦИОНАЛЬНЫЙ | 2021 |
|
RU2757796C1 |
| БЕЗМОТОРНОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ НА МУСКУЛЬНОЙ СИЛЕ ЧЕЛОВЕКА, ИСПОЛЬЗУЮЩЕЕ ОБРАЩЁННЫЙ ПРИНЦИП РАБОТЫ ТЕЛА ПРИ АКАДЕМИЧЕСКОЙ ГРЕБЛЕ, ДЛЯ ИСПОЛЬЗОВАНИЯ В КАЧЕСТВЕ ЛЕГКОГО ТРАНСПОРТНОГО СРЕДСТВА, ДЛЯ ТУРИЗМА, СПОРТА | 2015 |
|
RU2613134C2 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
Предлагаемый мускульно-пружинно-инерционный опоропоследовательный способ передвижения и тренажа относится к области мускульно-машинных систем, использующих накопление и отдачу энергии сил упругости, в т.ч. мускульных, и инерцию движения, предназначен для передвижения и тренажа, в частности, на самокате, санях и т.п. Цель - повышение скорости, комфортности, тренажности, плавности, экологичности передвижения. На одну из опор инерционного движения (совершаемого по инерции после толчка), связанных последовательно продольнопружинящим соединением, работающим в упругих деформациях растяжения и/или сжатия в продольном направлении, помещается одна часть тела пользователя, на другую из этих опор - другая его часть. Опоры тягово-толкающими движениями тела перемещаются последовательно-поочередно так, что им сообщаются переводимые одни в другие силы тяги, трения, упругих деформаций и (условно) инерции. Используется и противоположность упругих деформаций, и их инерционно-колебательный эффект, и упругость самого тела пользователя, в частности, позволяющая и продолжать движение при выходе из работы пружины между опорами. Отпадает необходимость отталкиваться конечностями от земли, пола, чем восстанавливается понятие "самокат". Инвалиды могут получать активную и пассивную лечебную тренировку, передвигаться внутри помещений, по лестницам, по земле и т.д., не отличаясь от других пользователей-ездоков. Способ направлен на решение проблем экологии природы и человека, социальных проблем разумным сочетанием мускульного среднескоростного круглогодичного, для любых дорог, сред и пользователей, переносного индивидуального транспорта с мототранспортом, преодолением перегрузки общественного транспорта, "пробок", аварий, стрессов, шумов, вибраций, загрязнений. 5 з.п.ф-лы, 2 ил.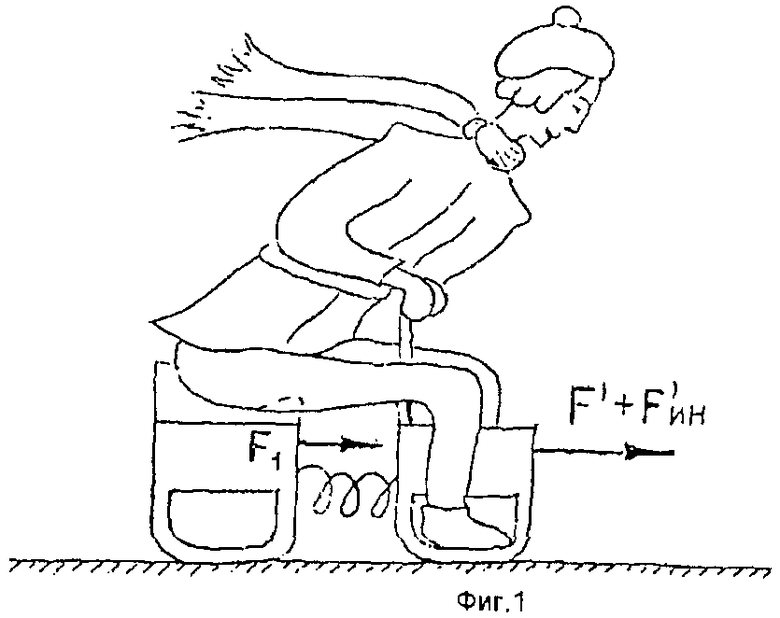
1. Мускульно-пружинно-инерционный опоропоследовательный способ передвижения и тренажа, основанный на том, что, используя мышечную упругость, толкают частью тела ездока одну и ту же из несущих его связанных упругим соединением последовательно опор инерционного движителя с приспособлениями для преодоления сопротивления системы, в том числе отдачи, в каждом двигательном цикле в продольном направлении, в направлении движения, отличающийся тем, что, с целью повышения скорости, экономичности, экологичности, в том числе тренажности, комфортности, в том числе плавности, легкости, бесшумности, фиксируют на все время передвижения одну из движущих частей тела пользователя на одной из несущих его опор инерционного движения, связанных последовательно продольнопружинящим соединением, другую часть тела на другой из этих опор, затем перемещают этими частями тела эти опоры попеременно одну относительно другой в продольном направлении, в направлении движения, причем перед перемещением опоры создают дополнительное давление на землю, среду, другой опоры, при сохранении качественного инерционного состояния последней, необходимое и достаточное для обретения частью тела на первой опоре способности к ее перемещению, к преодолению упругой деформации соединения опор, сразу после чего снимают дополнительное давление на землю, среду, в каждом двигательном цикле до перехода частей сил тяги, трения покоя, трения движения и упругой деформации соединения опор в инерцию движения опор, в кинетическую и потенциальную, переходящую в кинетическую, энергию, необходимую и достаточную для преодоления сопротивления, в том числе отдачи системы.
2. Способ по п.1, отличающийся тем, что частями тела пользователя перемещают опоры, исполненные в форме антифрикционных наземных, водных, воздушных, безвоздушных и т.п. движителей, а также ложементов, в том числе с подъемной силой, в том числе крыловидного профиля, несущие тело пользователя в той мере, в какой избавляют движущие его части от необходимости отталкиваться от земли, среды непосредственно.
3. Способ по п.2, отличающийся тем, что фиксируют движущие части тела посредством имеющихся и на той, и на другой опорах средств фиксации, в том числе рукояток, углублений, ложементов и тому подобных приспособлений, назначенных, наряду с другими связями, преодолевать сопротивление, отдачу системы.
4. Способ по п.3, отличающийся тем, что при продольно-пружинящем соединении опор, приспособленном работать в противоположных упругих деформациях, и достаточной физической силе пользователя перемещают частями тела опоры до достижения в соединении опор попеременно в каждом двигательном цикле обеих противоположных упругих деформаций.
5. Способ по п.4, отличающийся тем, что при наличии инерционно-колебательного эффекта противоположных упругих деформаций соединения опор достигают их с использованием этого эффекта, для чего перемещают очередную опору сразу после появления в части тела, назначенной перемещать другую опору, ощущения тяги в направлении очередного колебания соединения опор.
6. Способ по п.5, отличающийся тем, что для пассивно-лечебного тренажа частей тела пользователя, имеющих недостаточность функции, помещают их на опоры, приводимые в движение полноценными, движущими частями тела.

