Изобретение относится к машиностроению, в частности, к двухколесным мускульным средствам передвижения в положении стоя и может найти применение в качестве личного транспорта или для других целей.
Известен самокат (см. патент US 1706048, В62K 3/00, 1929), содержащий основание с площадкой для опорной ноги, рулевой узел с передним колесом и задним колесом.
Недостатком известного самоката является необходимость сгибания опорной ноги в колене при отталкивании второй ногой от поверхности дороги, что приводит к избыточному расходу, энергии и быстрой усталости ездока. Кроме того, для торможения известного самоката необходимо одну ногу опустить на опорную поверхность и скользить по ней, притормаживая, или спрыгнуть с площадки самоката и по инерции бежать за самокатом еще какое-то расстояние.
Известен также самокат (см. патент RU 2695969, А63С 17/02, 2019), содержащий основание с площадкой для опорной ноги, рулевой узел с передним колесом и заднее колесо, на оси которого по бокам соосно закреплены ролики меньшего диаметра.
Недостатком известного самоката является то, что для разгона самоката по поверхности при взаимодействии подошвы обуви ноги с роликом, перемещение ноги по ходу движения вперед ограничено опорной площадкой, нет возможности для свободного маха ноги. Кроме того, при перемещении ноги возможно взаимодействие последней с боковиной вращающегося заднего колеса. Причем ширина роликов незначительная и при прикладывании усилия подошвой стопы, вследствие большого удельного давления, будет вызывать болевые ощущения в ноге. Для торможения известного самоката необходимо ступней одной ноги либо притормаживать ролик, либо ногу опустить на опорную поверхность и скользить по ней, притормаживая, либо спрыгнуть с площадки самоката и по инерции бежать за самокатом еще какое-то расстояние.
Задачей предложенного решения является расширение эксплуатационных возможностей за счет повышения удобства эксплуатации.
Поставленная задача решается тем, что самокат, содержащий основание с площадкой для опорной ноги, рулевой узел с передним колесом и заднее колесо, на оси которого по бокам соосно закреплены ролики меньшего диаметра, он снабжен дополнительной соосной парой роликов, закрепленных на оси перед роликами меньшего диаметра по ходу движения и шарнирно установленных на основании по бокам, подпружиненных в горизонтальной плоскости относительно основания, с возможностью перемещения в горизонтальной плоскости и взаимодействия с роликами меньшего диаметра, ролики дополнительной пары по диаметру не меньше роликов меньшего диаметра, а по ширине больше последних, причем образующие поверхности роликов дополнительной пары и роликов меньшего диаметра выполнены рифлеными шероховатыми.
По сравнению с известным предложенный самокат обеспечивает свободный размах ноги назад при отталкивании от поверхности дополнительного ролика, без случайного взаимодействия с задним колесом и без болевого ощущения от взаимодействия стопы ноги с поверхностью дополнительного ролика, с последующим, при необходимости, дальнейшим торможением самоката путем прикладывания усилия к дополнительному ролику для взаимодействия с роликом меньшего размера, без покидания площадки самоката.
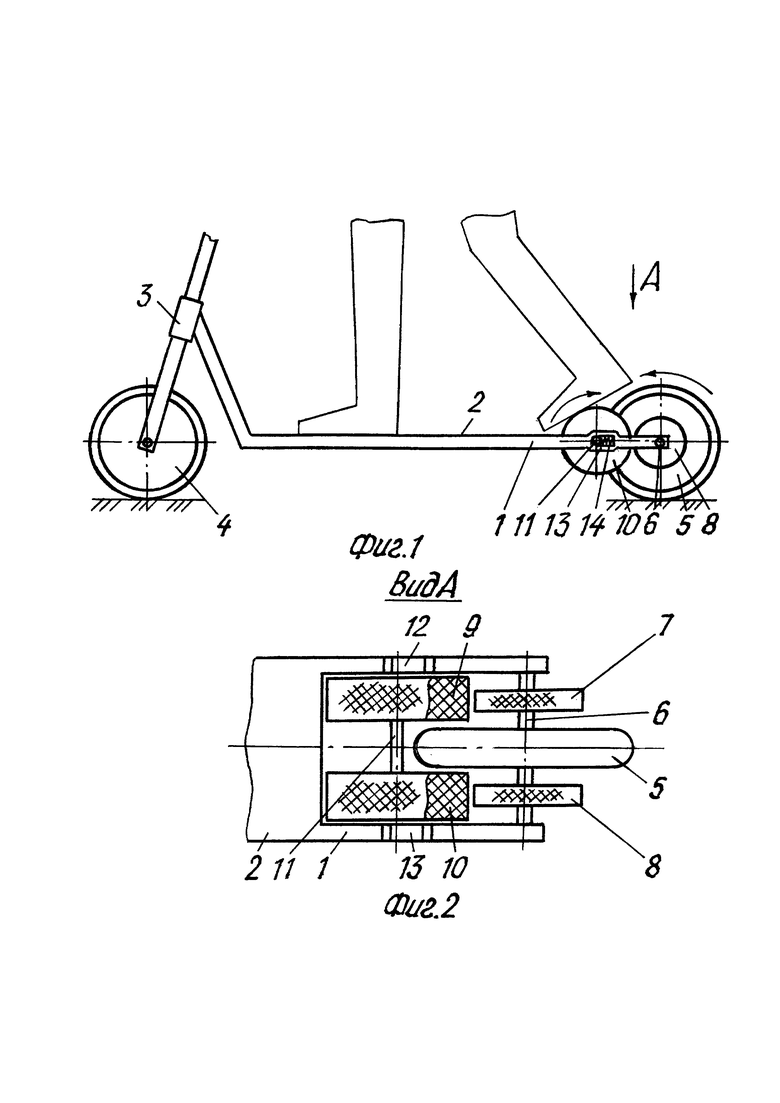
На фиг. 1 изображен самокат, общий вид; на фиг. 2 - вид А на фиг. 1.
Самокат содержит основание 1 с площадкой 2 для опорной ноги, рулевой узел 3 с передним колесом 4 и заднее колесо 5, на оси 6 которого по бокам соосно закреплены ролики 7 и 8 меньшего диаметра. Самокат снабжен дополнительной соосной парой неметаллических роликов 9 и 10, закрепленных на оси 11 перед роликами 7 и 8 меньшего диаметра по ходу движения и шарнирно установленных посредством шарнирных узлов 12 и 13 на основании 1 по бокам, подпружиненных в горизонтальной плоскости посредством пружин 14. относительно основания 1, с возможностью перемещения в горизонтальной плоскости и взаимодействия с роликами 7 и 8 меньшего диаметра. Ролики 9 и 10 дополнительной пары по диаметру не меньше роликов 7 и 8 меньшего диаметра, а по ширине больше последних, причем образующие поверхности роликов 9 и 10 дополнительной пары и роликов 7 и 8 меньшего диаметра выполнены рифлеными шероховатыми.
Самокат работает следующим образом.
В исходном положении ось 11 роликов 9 и 10 дополнительной пары поджата пружинами 14 в шарнирных узлах 12 и 13 таким образом, что ролики 9 и 10 не взаимодействуют с роликами 7 и 8 меньшего диаметра.
В начальный период ездок устанавливает стопу опорной ноги на площадку 2, а второй ногой отталкивается от опорной поверхности и переводит стопу второй ноги на ролик 9 или 10, в зависимости с какой стороны по ходу движения ездок установил опорную ногу на площадку 2. Если правая опорная нога на площадке 2, то стопа левой ноги взаимодействует с роликом 10, если левая опорная нога на площадке 2, то стопа правой ноги взаимодействует с роликом 9. Прикладывается усилие стопы ноги к поверхности ролика 9 или 10 в сторону заднего колеса 5 путем отталкивания, преодолевая сопротивление пружин 14. Вращательное движение от роликов 9 и 10 посредством фрикционного зацепления передается на ролики 7 и 8 меньшего диаметра, которые передают крутящий момент на заднее колесо 5. При снятии стопы ноги с поверхности ролика 9 или 10, ось 11, под действием распрямляющегося усилия пружин 14, возвращается в исходное положение, прерывая взаимодействие роликов 9 и 10 с роликами 7 и 8 меньшего диаметра, исключая расход энергии на холостое прокручивание роликов 9 и 10. В дальнейшем движении процесс циклически повторяется. Вращательное усилие стопы ноги прикладывается к поверхности роликов 9 или 10 под углом к горизонтальной поверхности, однако, учитывая небольшой зазор между парами роликов 9 и 10 и парами роликов 7 и 8 меньшего диаметра, усилия горизонтальной составляющей общего усилия будет достаточно для взаимодействия упомянутых пар роликов и передаче крутящего момента на заднее колесо 5. При необходимости торможения самоката прикладывается усилие к ролику 9 или 10 в горизонтальной плоскости назад или усилие в горизонтальной плоскости назад совместно с вращательным движением против вращения заднего колеса 5 до взаимодействия с парами роликов 7 и 8 меньшего диаметра. Учитывая небольшую ширину между шарнирными узлами 12 и 13 и минимальное расстояние между парами роликов 9, 10 и парами роликов 7, 8 меньшего диаметра, перекоса оси 11 в горизонтальной плоскости не произойдет, при прикладывании усилия к ролику 9 или 10. Прикладывание усилия стопы ноги к ролику 9 или 10 путем отталкивания назад похоже на отталкивание ногой от опорной поверхности при трогании с места самоката, однако усилие, прикладываемое к ролику 9 или 10 в процессе движения, будет значительно меньше усилия толкания всего самоката вместе с весом ездока. Кроме того, отталкивание назад, гораздо предпочтительнее толкания ногой вперед, т.к. при этом реализуется большее усилие за счет беспрепятственного инерционного свободного маха ноги.
Пара роликов 9 и 10 выполнена по диаметру не меньше диаметра пары роликов 7 и 8, для увеличения передаточного отношения, с целью увеличения скорости движения. Ширина роликов 9 и 10 выбирается соизмеримой с шириной стопы ноги, для уменьшения удельного давления на стопу ноги при передаче усилия на поверхность роликов 9 или 10, исключающая болевые ощущения в ноге при управлении. Выполнение образующей поверхности дополнительных роликов 9 и 10 и роликов 7 и 8 меньшего диаметра рифленой шероховатой направлено на увеличение сцепления упомянутых пар роликов между собой, как при передаче крутящего момента на заднее колесо 5, так и при торможении заднего колеса 5, а также для более надежного контакта роликов 9 и 10 при взаимодействии с подошвой стопы ноги.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ-ТУРБО | 2018 |
|
RU2695969C1 |
| Самокат | 1989 |
|
SU1722934A1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2007 |
|
RU2333861C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЦЕПИ | 2003 |
|
RU2257991C2 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282550C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЛЕДЯНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2736796C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОЧЕЙ ПОВЕРХНОСТИ ШТУКАТУРНОГО ПРАВИЛА | 2018 |
|
RU2693224C1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2001 |
|
RU2223191C2 |
| СПОСОБ ОТРЫВА БОРТОВ ШИНЫ ОТ ОБОДА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2676587C1 |
Изобретение относится к области машиностроения, в частности к самокатам. Самокат содержит основание с площадкой для опорной ноги, рулевой узел с передним колесом и заднее колесо, на оси которого по бокам соосно закреплены ролики меньшего диаметра. Самокат снабжен дополнительной соосной парой роликов, закрепленных на оси перед роликами меньшего диаметра по ходу движения и шарнирно установленных на основании по бокам. Ролики дополнительной пары по диаметру не меньше роликов меньшего диаметра, а по ширине больше последних. Образующие поверхности роликов дополнительной пары и роликов меньшего диаметра выполнены рифлеными шероховатыми. Достигается повышение удобства эксплуатации. 2 ил.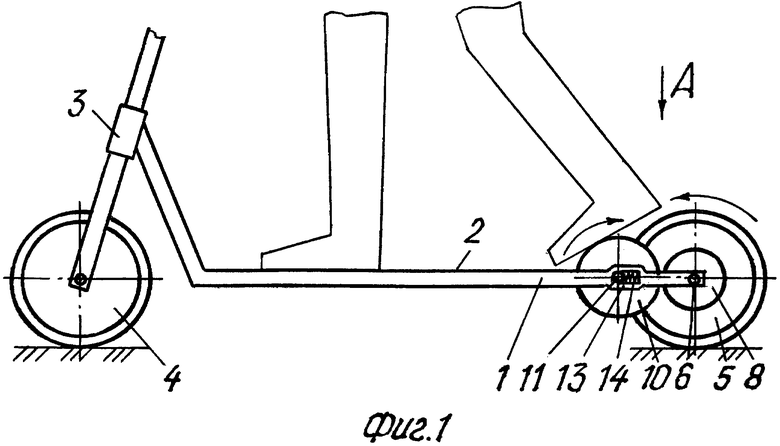
Самокат, содержащий основание с площадкой для опорной ноги, рулевой узел с передним колесом и заднее колесо, на оси которого по бокам соосно закреплены ролики меньшего диаметра, отличающийся тем, что он снабжен дополнительной соосной парой роликов, закрепленных на оси перед роликами меньшего диаметра по ходу движения и шарнирно установленных на основании по бокам, подпружиненных в горизонтальной плоскости относительно основания, с возможностью перемещения в горизонтальной плоскости и взаимодействия с роликами меньшего диаметра, ролики дополнительной пары по диаметру не меньше роликов меньшего диаметра, а по ширине больше последних, причем образующие поверхности роликов дополнительной пары и роликов меньшего диаметра выполнены рифлеными шероховатыми.
| САМОКАТ-ТУРБО | 2018 |
|
RU2695969C1 |
| САМОКАТ | 1991 |
|
RU2009941C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ГЕТЕРОГЕННОГО СИНТЕЗА МЕТАНОЛА ИЛИ АММИАКА | 2002 |
|
RU2310641C2 |

