Изобретение относится к подъемно-транспортному оборудованию и может быть исполь зовано для захвата и транспортировки грузов с отверстиями в стесненных условиях.
Целью изобретения является повышение надежности работы в стесненных условиях.
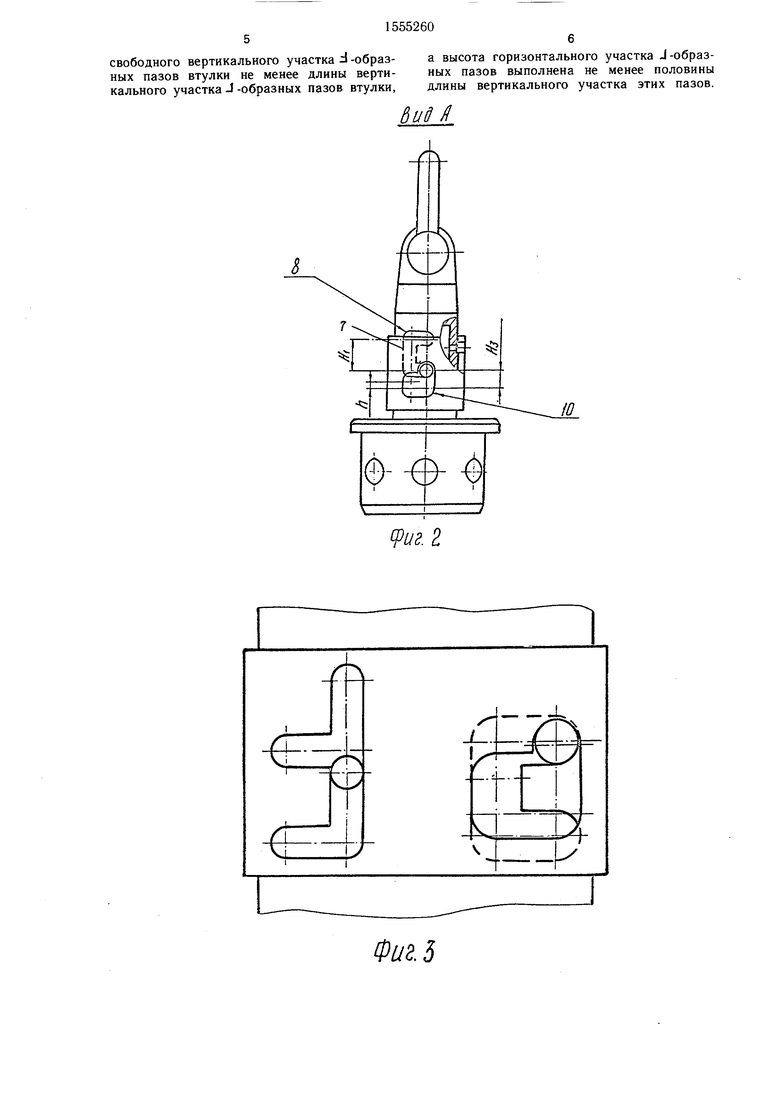
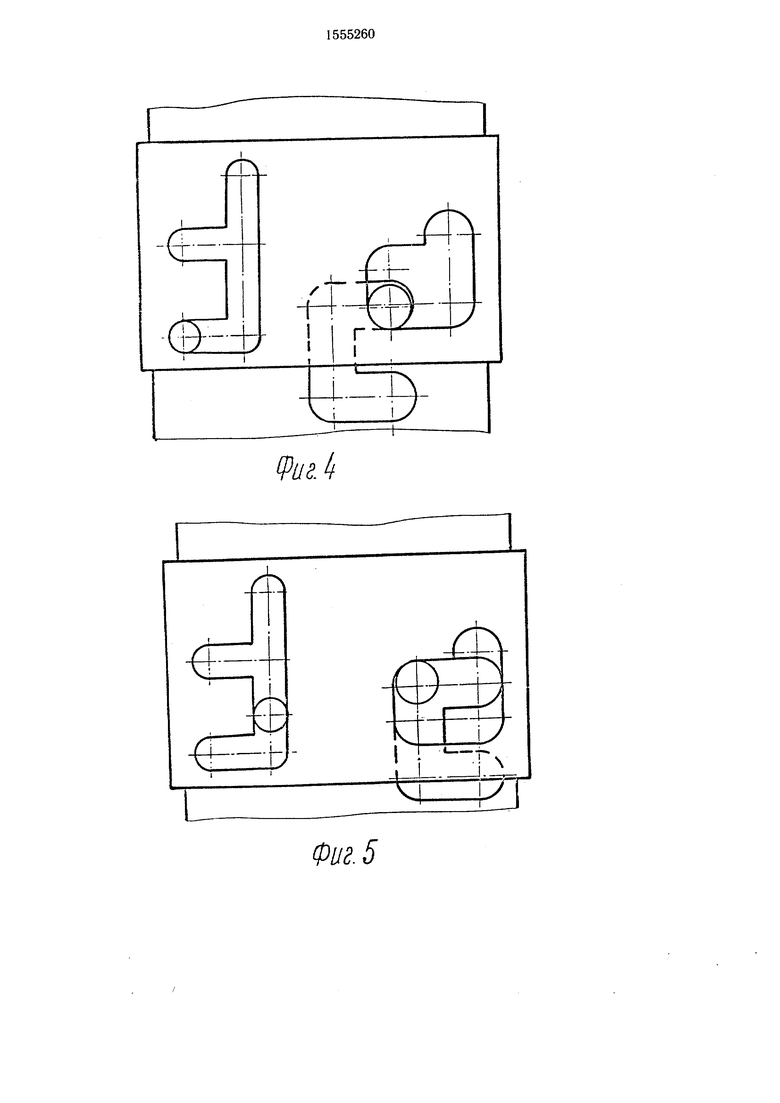
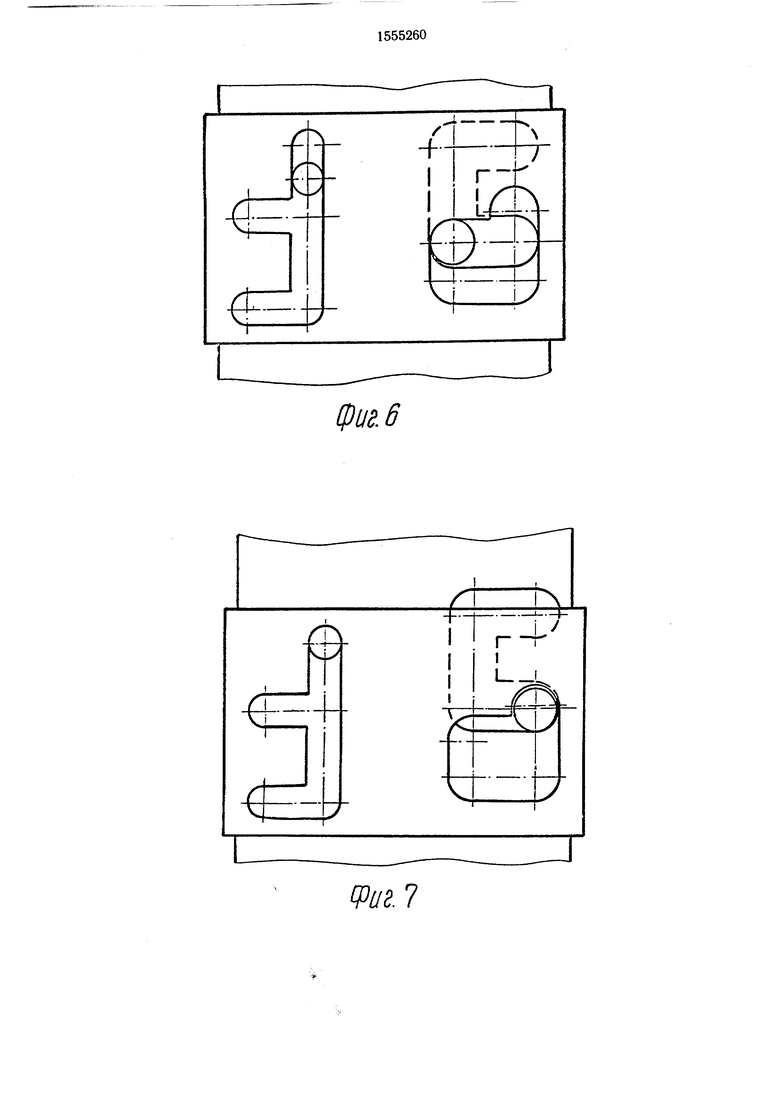
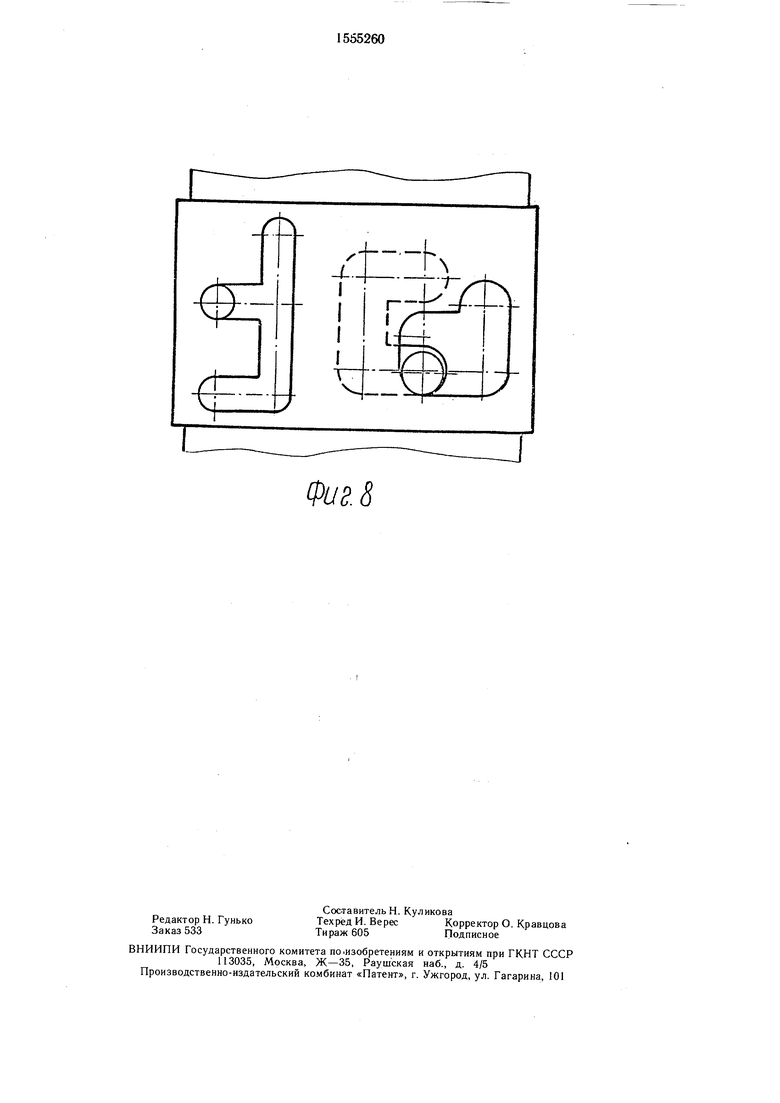
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - расположение элементов устройства в крайнем верхнем положении подвижной оси; на фиг. 4 - то же, после подъе- ма и поворота подвижной втулки; на фиг. 5 - то же, после поворота подвижной оси и вывода ручек из горизонтального участка I-образного паза; на фиг. 6 - то же, после опускания подвижной оси до ее поворота и ввода ручек в горизонтальный участок -образного паза; на фиг. 7 - то же, в крайнем нижнем положении; на фиг. 8 - то же, после подъема и поворота подвижной втулки.
Захватное устройство для грузов с отверстиями содержит полый корпус 1, захватные элементы 2 в виде шариков, размещенную в корпусе подвижную в вертикальном Направлении ось 3 с ручками 4 и несущую серьгу 5 для соединения грузоподъемным механизмом. В корпусе 1 жестко закреплены диаметрально противоположно друг другу пальцы 6, а сам корпус 1 выполнен с диаметрально противоположными С -образными пазами 7. Устройство снабжено свободно установленной на корпусе 1 втулкой 8, выполненной с диаметрально расположенными парами d- и d -образных пазов 9 и 10. Ручки 4 подвижной оси 3 расположены в t-образных пазах 7 корпуса 1 и J-образных пазах 10 втулки 8, а пальцы 6 размещены в Н-образных 9 пазах втулки 8.
Расстояние Н между горизонтальными участками J-образных пазов 9 выполнено не менее расстояния между горизонтальными участками Hi L-образного паза 7. Длина свободного вертикального участка Н2 d-об- разных пазов 9 втулки 8 выполнена не менее длины вертикального участка Нз -1- образного паза 10 втулки 8, а высота h горизонтального участка J-образных пазов 10 втулки 9 выполнена равной половине длины вертикального участка Нз -J-образного паза 10 втулки 8.
Захватное устройство работает следующим образом.
Перед установкой захватного устройства в отверстие груза подвижная ось 3 подвертикальному и горизонтальному участкам d-образного паза 9, а ручки 4 оси 3 расфик- сируются (фиг. 4).
Ось 3 поворачивают, перемещая ручки 4 по горизонтальному участку -образного па° за 7 до упора ручек в вертикальный участок паза 7, при этом палец 6 перемещается по горизонтальному участку паза 9 до его вертикального участка, после чего втулка 8 сама опускается до упора ручек 4 в край па10 за 10 (фиг. 5).
Ручки 4 перемещают вниз по вертикальному участку паза 7, при этом ось 3 опускается в корпусе 1 и перемещает шарики 2,
. осуществляя тем самым захват груза
1& (фиг. 6).
Ручки 4 перемещают по горизонтальному участку паза 7, при этом втулка 8 неподвижна (палец б взаимодействует с верти20 кальным участком паза 9). Когда ручки 4 оказываются у J-образного паза 10, втулка 8 сама опускается и фиксирует ручки 4, а палец 6 занимает крайнее положение в вертикальном участке 9 втулки 8 (фиг. 7). с 25 Затем осуществляется зацепление с крюком грузоподъемной машины и перенос груза. Для снятия захватного устройства ручки 4 расфиксируют, поднимая и поворачит вая до упора втулки 8 (фиг. 8). Ручки 4 перемещают из нижнего горизонтального
30 участка С-образного паза 7 в верхний, при этом ось 3 поднимается, расфиксируя шарики 2, которые утапливаются в корпусе 1 при снятии захватного устройства с груза.
Формула изобретения
35
40
1. Захватное устройство для грузов с отверстиями, содержащее полый корпус с захватными элементами в виде шариков, размещенную в корпусе подвижную в вертикальном направлении ось с ручками и несущую серьгу для соединения с грузоподъемными механизмами, отличающееся тем, что, с целью повышения надежности работы в стесненных условиях, корпус выполнен с двумя С-образными пазами, распо- 45 ложенными диаметрально противоположно друг другу, а устройство снабжено жестко закрепленными диаметрально противоположно на корпусе двумя пальцами и свободно установленной на корпусе втулкой, выполненной с диаметрально расположеннята вверх и зафиксирована в горизонталь- 50 ными парами d - и J -образных пазов, ,при
ной части -образного паза 7 корпуса 1 ручками 4, подвижная втулка 8 фиксирует ручки 4 оси 3 в пазе 7 и застопорена пальцами 6 корпуса 1 в пазе 9 (фиг. 3), шарики 2 утоплены в корпусе 1.
После установки захватного устройства в отверстие груза подвижную втулку 8 поднимают до упора и поворачивают до упора, при этом палец 6 перемещается по
55
этом ручки подвижной оси расположены в С-образных пазах корпуса и J -образных пазах втулки каждая, а упомянутые пальцы размещены ad-образных пазах втулки. 2. Устройство по п. 1, отличающееся тем, что расстояние между горизонтальными участками d-образных пазов втулки не менее расстояния между горизонтальными участками -образных пазов корпуса, длины
вертикальному и горизонтальному участкам d-образного паза 9, а ручки 4 оси 3 расфик- сируются (фиг. 4).
Ось 3 поворачивают, перемещая ручки 4 по горизонтальному участку -образного паза 7 до упора ручек в вертикальный участок паза 7, при этом палец 6 перемещается по горизонтальному участку паза 9 до его вертикального участка, после чего втулка 8 сама опускается до упора ручек 4 в край паза 10 (фиг. 5).
Ручки 4 перемещают вниз по вертикальному участку паза 7, при этом ось 3 опускается в корпусе 1 и перемещает шарики 2,
осуществляя тем самым захват груза
(фиг. 6).
Ручки 4 перемещают по горизонтальному участку паза 7, при этом втулка 8 неподвижна (палец б взаимодействует с верти20 кальным участком паза 9). Когда ручки 4 оказываются у J-образного паза 10, втулка 8 сама опускается и фиксирует ручки 4, а палец 6 занимает крайнее положение в вертикальном участке 9 втулки 8 (фиг. 7). 25 Затем осуществляется зацепление с крюком грузоподъемной машины и перенос груза. Для снятия захватного устройства ручки 4 расфиксируют, поднимая и поворачит вая до упора втулки 8 (фиг. 8). Ручки 4 перемещают из нижнего горизонтального
30 участка С-образного паза 7 в верхний, при этом ось 3 поднимается, расфиксируя шарики 2, которые утапливаются в корпусе 1 при снятии захватного устройства с груза.
Формула изобретения
35
1. Захватное устройство для грузов с отверстиями, содержащее полый корпус с захватными элементами в виде шариков, размещенную в корпусе подвижную в вертикальном направлении ось с ручками и несущую серьгу для соединения с грузоподъемными механизмами, отличающееся тем, что, с целью повышения надежности работы в стесненных условиях, корпус выполнен с двумя С-образными пазами, распо- ложенными диаметрально противоположно друг другу, а устройство снабжено жестко закрепленными диаметрально противоположно на корпусе двумя пальцами и свободно установленной на корпусе втулкой, выполненной с диаметрально расположенными парами d - и J -образных пазов, ,при
5
этом ручки подвижной оси расположены в С-образных пазах корпуса и J -образных пазах втулки каждая, а упомянутые пальцы размещены ad-образных пазах втулки. 2. Устройство по п. 1, отличающееся тем, что расстояние между горизонтальными участками d-образных пазов втулки не менее расстояния между горизонтальными участками -образных пазов корпуса, длины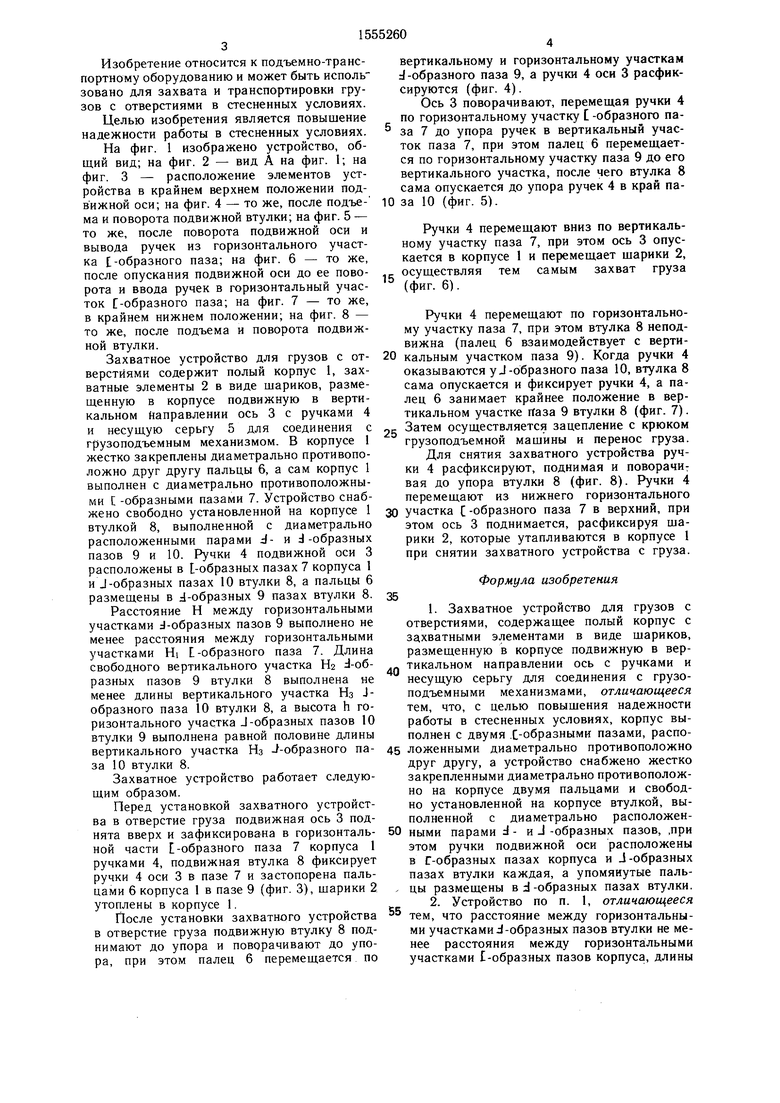
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗА С ОТВЕРСТИЕМ | 1995 |
|
RU2096305C1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| УСТРОЙСТВО ДЛЯ ПЛОМБИРОВАНИЯ | 1995 |
|
RU2104858C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| Устройство для удаления облоя | 1986 |
|
SU1362640A2 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захватное устройство для подъемаи КАНТОВАНия гРузОВ C уТОплЕННыМиМОНТАжНыМи пЕТляМи | 1979 |
|
SU798018A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| ТАКЕЛАЖНЫЙ УЗЕЛ | 2003 |
|
RU2245835C1 |
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано для захвата и транспортировки грузов с отверстиями. Целью изобретения является повышение надежности работы в стесненных условиях. Устройство снабжено подвижной втулкой 8, выполненной с @ - и @ -образными пазами, свободно установленной на корпусе 1. В корпусе 1 жестко закреплены пальцы 6 и выполнены @ -образные пазы. Ручки 4 подвижной оси 3 расположены каждая в @ -образном пазу корпуса 1 и @ -образном пазу втулки 8 одновременно, а каждый палец 6 размещен в @ -образном пазу 9 втулки 8. Конструктивное выполнение пазов позволяет фиксировать и расфиксировать ручки 4 оси 3 при прерывистом режиме подъема груза в стесненных условиях. 1 з.п.ф-лы, 8 ил.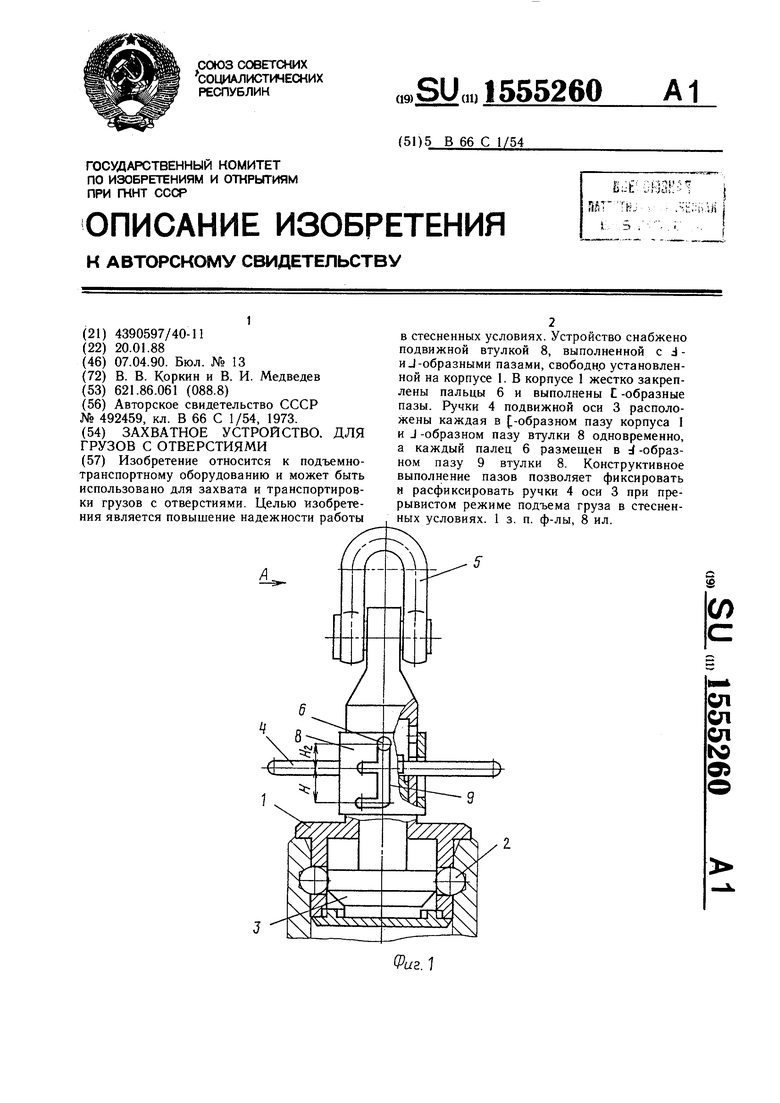
т
9U8.2
1
Фиг.З
Фиг. It
-Е
ч
to. 5
jiv
у
7
-f
-fc
фиг. 6
Т
-Л
J
ОДгг
Фиг. 8
| Захватное устройство для грузов с отверстиями | 1973 |
|
SU492459A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
