Настоящее изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейного ускорения, угловой скорости и т.д.
Известны преобразователи инерциальной информации [1],[2], содержащие чувствительный элемент, преобразователь положения, магнитоэлектрический силовой преобразователь, усилитель.
Наиболее близким по технической сущности является преобразователь инерциальной информации [3], содержащий чувствительный элемент, преобразователь положения, магнитоэлектрический силовой преобразователь, усилитель с n-каскадным усилителем постоянного тока, к выходу n-го каскада которого подключены последовательно соединенные компенсационная катушка магнитоэлектрического силового преобразователя и k (k = 2,3...) масштабных резистора, причем один вывод компенсационной катушки подсоединен к выходу n-го каскада n -каскадного усилителя постоянного тока, второй вывод компенсационной катушки соединен с первым выводом первого из k масштабных резисторов.
Недостатком такого преобразователя инерциальной информации является ограничение максимального напряжения на последовательно включенных масштабных резисторах до максимального выходного напряжения усилителя постоянного тока падением напряжения на компенсационной катушке.
Техническим результатам изобретения является повышение точности измерений преобразователя инерциальной информации.
Данный технический результат достигается в преобразователе инерциальной информации, например акселерометре или гироскопическом измерителе угловой скорости, содержащем чувствительный элемент, преобразователь положения, магнитоэлектрический силовой преобразователь, усилитель с n-каскадным усилителем постоянного тока, к выходу n-гo каскада которого подключены последовательно соединенные компенсационная катушка магнитоэлектрического силового преобразователя и k (k= 2,3...) масштабных резисторов, причем один вывод компенсационной катушки подсоединен к выходу n-го каскада n-каскадного усилителя постоянного тока, второй вывод компенсационной катушки соединен с первым выводом первого, из k масштабных резисторов, тем, что введен дополнительно j-аскадный усилитель постоянного тока, к входу первого каскада которого подключены соединенный с (k-1)-ым масштабным резистором первый вывод k-го масштабного резистора и второй вывод k-го масштабного резистора, к выходу j-го каскада j -каскадного усилителя постоянного тока подключена точка соединения первого вывода первого масштабного резистора с вторым выводом компенсационной катушки.
В частном случае выполнения преобразователя инерциальной информации напряжение питания j-каскадного усилителя постоянного тока выполнено большим напряжения питания постоянного тока n -каскадного усилителя постоянного тока.
Посредством введения дополнительно j-каскадного усилителя постоянного тока, подключения к входу первого каскада j-каскадного усилителя постоянного тока k-го масштабного резистора, подключения к выходу j-го каскада j-каскадного усилителя постоянного тока точки соединения первого вывода первого масштабного резистора с компенсационной катушкой обеспечивается получение на масштабных резисторах максимального напряжения, равного максимальному выходному напряжению j-го каскада j-каскадного усилителя постоянного тока. За счет исключения падения напряжения на компенсационной катушке повышаются разрешающая способность и точность измерения преобразователя инерциальной информации.
На фиг.1 представлен общий вид преобразователя инерциальной информации - акселерометра; на фиг.2 - электрическая схема преобразователя инерциальной информации - акселерометра; на фиг.3 - преобразователь инерциальной информации - гироскопический измеритель угловой скорости.
Преобразователь инерциальной информации - акселерометр (фиг.1) содержит корпус 1, в котором установлен чувствительный элемент 2 с подвижной частью 3 и неподвижной частью 4, которые соединены между собой посредством упругого шарнира 5. На подвижной части чувствительного элемента 2 установлен груз 6. Магнитоэлектрический силовой преобразователь содержит установленный в корпус 1 постоянный магнит 7 с диаметральным направлением намагниченности и компенсационную катушку 8 на подвижной части 3 чувствительного элемента 2. Неподвижные электроды 9', 9'' емкостного преобразователя положения расположены на постоянном магните 7, а подвижный электрод выполнен в виде электропроводной поверхности подвижной части 3 чувствительного элемента 2. Чувствительный элемент 2 может быть изготовлен, например, из монокристаллического кремния методом анизотропного травления.
Корпус 1 закрыт крышкой 10.
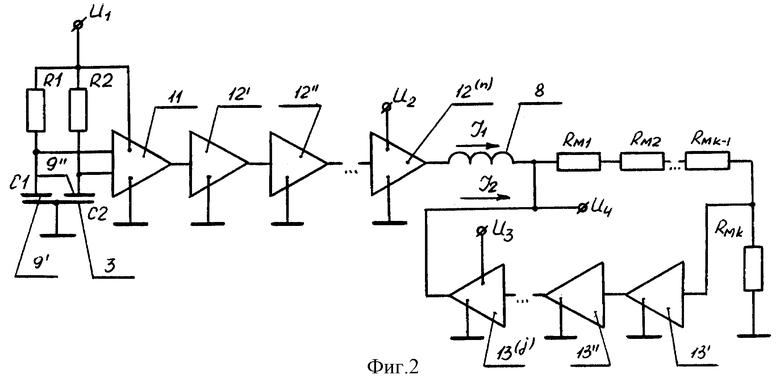
Преобразователь положения (фиг.2) в преобразователе инерциальной информации - акселерометре выполнен по мостовой схеме и содержит конденсаторы C1, С2 и резисторы R1, R2. Конденсатор C1 образован неподвижным электродом 9' и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. Конденсатор С2 образован неподвижным электродом 9'' и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. К одной диагонали мостовой схемы преобразователя положения подведено напряжение питания U1 от источника переменной ЭДС. Выход преобразователя положения соединен с входом усилителя 11, выход которого соединен с входом первого каскада 12 ' n-каскадного усилителя постоянного тока, запитанного напряжением U2 от источника питания постоянного тока. Один вывод компенсационной катушки 8 магнитоэлектрического силового преобразователя подключен к выходу n-го каскада 12(n) n-каскадного усилителя постоянного тока. Второй вывод компенсационной катушки 8 подсоединен к первому выводу первого масштабного резистора RM1, к второму выводу которого подключены последовательно соединенные масштабные резисторы RM2, RMk-1,RMk. К входу первого каскада 13' j-каскадного усилителя постоянного тока подключен первый вывод k-го масштабного резистора RMK, соединенного с (k-1)-ым масштабным резистором RMK-1. Второй вывод масштабного резистора RMK соединен с входом первого каскада 13' j-каскадного усилителя постоянного тока посредством общего провода. Выход j-го каскада 13(j) j-каскадного усилителя постоянного тока подсоединен к точке соединения первого вывода первого масштабного резистора RM1 с вторым выводом компенсационной катушки 8. Напряжением U3 от источника питания постоянного тока запитан j-каскадный усилитель постоянного тока. Напряжение U3 может быть выполнено большим напряжения U2.
Преобразователь инерциальной информации - акселерометр (фиг.1, 2) работает следующим образом. При наличии ускорения на груз 6 воздействует инерционная сила, которая вызывает угловое перемещение подвижной части 3 чувствительного элемента 2 относительно неподвижной части 4. Пусть направление ускорения таково, что нижняя часть подвижной части 3 чувствительного элемента 2 приближается к неподвижному электроду 9', а ее верхняя часть отдаляется от неподвижного электрода 9''. Тогда емкость конденсатора C1 увеличивается, емкость конденсатора С2 уменьшается, происходит разбаланс мостовой схемы преобразователя положения, и с выхода преобразователя положения на усилитель 11 поступает переменный сигнал рассогласования следящей системы преобразователя инерциальной информации - акселерометра. После его усиления и преобразования в сигнал постоянного тока в усилителе 11 он усиливается по напряжению и мощности в n-каскадном усилителе постоянного тока (каскады 12', 12''...12(n)), с n-го каскада 12(n) которого напряжение подается на состоящую из включенных последовательно компенсационной катушки 8 и масштабных резисторов RM1, RM2...RMK цепь.
Протекающим через компенсационную катушку 8 током I1 в магнитоэлектрическом силовом преобразователе создается компенсационная сила, уравновешивающая инерционную силу.
Напряжение, полученное с выхода j-го каскада 13(j) j-каскадного усилителя постоянного тока после усиления в нем напряжения с k-го масштабного резистора RMK, подается на масштабные резисторы RM1, RM2...RMK. Ток II через компенсационную катушку 8 и ток I2 с выхода j-го каскада j-каскадного усилителя постоянного тока создают на масштабных резисторах RM1, RM2...RMK падение напряжения U4, являющееся мерой измеряемого преобразователем инерциальной информации ускорения. Максимальная величина напряжения U4 близка к напряжению питания (U3) j -го каскада j -каскадного усилителя постоянного тока. При U2 = U3 нa верхнем пределе диапазона измерений максимальная величина напряжения. U4 близка к напряжению питания U2. Поэтому как бы устраняется падение напряжения на компенсационной катушке 8 для получения максимальной величины напряжения U4 на масштабных резисторах RM1, RM2...RMK. При большей величине напряжения U4 обеспечивается повышение разрешающей способности измерения ускорения посредством преобразователя инерциальной информации - акселерометра.
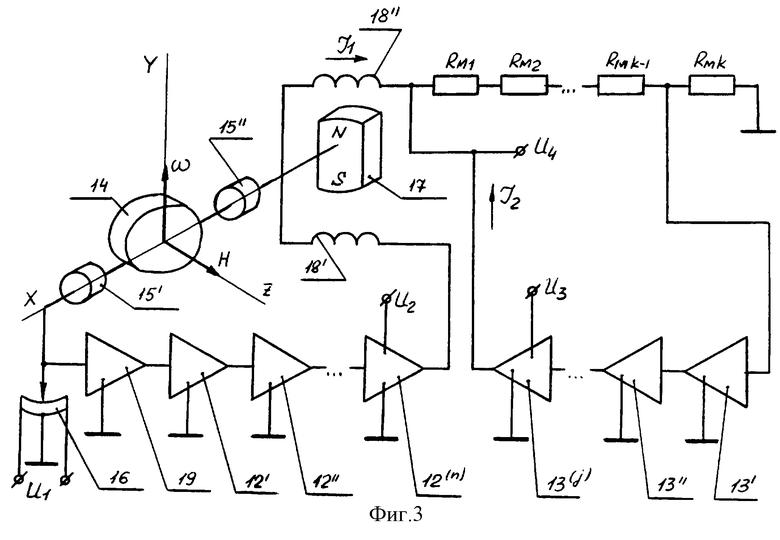
В преобразователе инерциальной информации - гироскопическом измерителе угловой скорости (фиг.3) - чувствительный элемент 14 (ротор гироскопа) с кинетическим моментом Н по оси Z установлен в корпусе посредством подшипников 15', 15'', обеспечивающих свободу углового перемещения чувствительного элемента 14 относительно оси X. По оси Х установлены преобразователь углового положения 16, например потенциометрического типа, и магнитоэлектрический силовой преобразователь с постоянным магнитом 17 и компенсационной катушкой, состоящей из последовательно соединенных секций 18', 18''. Выход преобразователя углового положения 16 подключен к входу усилителя 19, к выходу которого подключен вход первого каскада 12' n-каскадного усилителя постоянного тока. Первый вывод компенсационной катушки от секции 18' подключен к выходу n-го каскада 12(n) n-каскадного усилителя постоянного тока. Второй вывод компенсационной катушки от секции 18'' подсоединен к первому выводу первого масштабного резистора RM1, к второму выводу которого подключены последовательно соединенные масштабные резисторы RM2, RM3...RMK. К входу первого каскада 13' j-каскадного усилителя постоянного тока подключен первый вывод k-го масштабного резистора RMK, соединенного с (k-1)-ым масштабным резистором RMК-1. Выход j-го каскада 13(j) j-каскадного усилителя постоянного тока подсоединен к точке соединения первого масштабного резистора RM1 с вторым выводом секции 18'' компенсационной катушки.
Преобразователь инерциальной информации - гироскопический измеритель угловой скорости (фиг. 3), работает следующим образом. При наличии угловой скорости ω по оси Y чувствительный элемент 14 под действием гироскопического момента разворачивается относительно оси X. Преобразователь углового положения 16 измеряет угловое перемещение чувствительного элемента 14 и выдает сигнал в усилитель 19, который далее усиливается в n-каскадном усилителе постоянного тока, c выхода последнего каскада 12(n) которого напряжение подается на компенсационную катушку с секциями 18', 18'' и масштабные резисторы RM1, RM2...RMK. Протекающим через секции 18', 18'' компенсационной катушки током I1 в магнитоэлектрическом силовом преобразователе создается компенсационный момент, уравновешивающий гироскопический момент.
Напряжение, полученное с выхода j-го каскада 13(j) j-каскадного усилителя постоянного тока после усиления в нем напряжения с k-го масштабного резистора RMK подается на масштабные резисторы RM1, RM2...RMK. Tоки I1 и I2 создают на масштабных резисторах RM1, RM2...RMK падение напряжения U4, являющееся мерой измеряемой угловой скорости.
Так как напряжение U4 больше напряжения, создаваемого проходящим через масштабные резисторы RM1, RM2. . .RMk током I1, то повышается разрешающая способность измерения угловой скорости. При напряжении питания U3> U2 еще более повышается разрешающая способность измерения угловой скорости вследствие большего максимального напряжения U4.
Иcточники информации
1. Патент РФ 2028000 кл. G 01 P 15/08, 15/13. Компенсационный акселерометр. 1995 г.
2. Гироскопические системы. Под ред. Д.С. Пельпора. М.: Высшая школа, 1986 г., с. 64, 65.
3. Патент РФ 2107301 кл. G 01 P 15/13. Компенсационный акселерометр. 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2184937C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
Изобретение предназначено для использования в измерительной технике для измерения линейного ускорения, угловой скорости и т.д. Технический результат - повышение точности. Преобразователь, например акселерометр или гироскопический измеритель угловой скорости, содержит чувствительный элемент, преобразователь положения, магнитоэлектрический силовой преобразователь, усилитель с n-каскадным усилителем постоянного тока. К выходу усилителя подключены последовательно соединенные компенсационная катушка магнитоэлектрического силового преобразователя и масштабные резисторы. Введен дополнительно j-каскадный усилитель постоянного тока, к входу первого каскада которого подключена точка соединения двух последних масштабных резисторов. К выходу j-го каскада подключена точка соединения первого вывода первого масштабного резистора с вторым выводом компенсационной катушки. 1 з.п. ф-лы, 3 ил.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| Компенсационный акселератор | 1991 |
|
SU1775671A1 |
| US 6134964, 24.10.2000. | |||

