Данное изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейных и угловых ускорений.
Известен преобразователь инерциальной информации, содержащий основание, чувствительный элемент, преобразователи линейного и углового положений, электрические силовые преобразователи, усилители, к входам которых подключены выходы преобразователей положения, а к выходам - электростатические силовые преобразователи [1].
Недостатком такого преобразователя инерциальной информации является малый диапазон измерений вследствие ограничения величины напряжения, прилагаемого к электростатическому силовому преобразователю на верхнем пределе измерений.
Наиболее близким по технической сущности является преобразователь инерциальной информации [2], содержащий основание, чувствительный элемент в виде единого элемента из шести полых цилиндров, объединенных одними своими торцами и расположенных попарно по каждой из трех взаимно перпендикулярных осей, узлы ориентации чувствительного элемента в основании, датчики линейного положения чувствительного элемента по каждой оси, датчики углового положения чувствительного элемента относительно каждой оси, два силовых преобразователя магнитоэлектрического типа по каждой оси, которые выполнены с расположением действия их силы в одинаковом направлении вдоль данной оси по разные стороны от данной оси относительно друг друга и каждый из которых содержит компенсационную катушку на чувствительном элементе и магнитную систему с постоянным магнитом в узле ориентации; содержащий первый дифференциальный усилитель по каждой оси, к входу которого подключен датчик линейного положения по данной оси, второй дифференциальный усилитель по каждой оси, к входу которого подключен датчик углового положения относительно данной оси, первый и второй суммирующие усилители по каждой оси, причем по каждой оси выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключена компенсационная катушка одного силового преобразователя, к выходу второго суммирующего усилителя подключена компенсационная катушка другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси.
Недостатком данного преобразователя инерциальной информации является мультипликативная погрешность измерения угловых ускорений вследствие несоосности измерительных осей и осей действия сил магнитоэлектрических силовых преобразователей.
Техническим результатом изобретения является повышение точности измерения угловых ускорений преобразователем инерциальной информации.
Данный технический результат достигается в преобразователе инерциальной информации, содержащем основание, чувствительный элемент в виде единого из шести полых цилиндров, объединенных одними своими торцами и расположенных попарно по каждому из трех взаимно перпендикулярных осей, узлы ориентации чувствительного элемента, датчики линейного положения чувствительного элемента по каждой оси, датчики углового положения чувствительного элемента относительно каждой оси, два силовых преобразователя магнитоэлектрического типа по каждой оси, которые выполнены с расположением действия их силы в одинаковом направлении вдоль данной по разные стороны от данной оси относительно друг друга и каждый из которых содержит компенсационную катушку на чувствительном элементе и магнитную систему с постоянным магнитом в узле ориентации: содержащем первый дифференциальный усилитель по каждой оси, к входу которого подключен датчик линейного положения по данной оси, второй дифференциальный усилитель по каждой оси, к входу которого подключен датчик углового положения относительно данной оси; первый и второй суммирующие усилителя по каждой оси, причем по каждой оси выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключена компенсационная катушка одного силового преобразователя, к выходу второго суммирующего усилителя подключена компенсационная катушка другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси, тем, что чувствительный элемент выполнен с расположением осей полых цилиндров со смещением относительно друг друга в каждой паре цилиндров по каждой из трех взаимно перпендикулярных осей, магнитоэлектрические силовые преобразователи по каждой оси выполнены с расположением компенсационных катушек и магнитных систем соосно с осями полых цилиндров.
Путем выполнения чувствительного элемента с расположением осей полых цилиндров со смещением относительно друг друга в каждой паре полых цилиндров по каждой из трех взаимно перпендикулярных осей, выполнения магнитоэлектрических силовых преобразователей с расположением компенсационных катушек и магнитных систем соосно с осями полых цилиндров обеспечивается более точное взаимное расположение осей действия сил магнитоэлектрических силовых преобразователей по каждой оси. При этом достигается минимизация момента по измерительным осям измерителей угловых ускорений вследствие устранения несоосности измерительных осей и осей действия сил силовых преобразователей.
В результате уменьшается мультипликативная составляющая погрешности измерения угловых ускорений и повышается точность измерений угловых ускорений посредством преобразователя инерциальной информации.
На фиг. 1 приведена конструкция преобразователя инерциальной информации, на фиг. 2 - электрическая схема преобразователя инерциальной информации.
В преобразователе инерциальной информации (фиг. 1), имеющем состоящее из двух частей 1I и 1II основание, по оси X-X установлены узлы ориентации 2I, 2II, а по оси Y-Y - узлы ориентации 2III, 2IV. По оси Z-Z, перпендикулярной осям X-X и Y-Y установлены еще два узла ориентации. Между узлами ориентации расположен чувствительный элемент 3, выполненный из шести полых цилиндров из электропроводного материала. Два полых цилиндра 4I, 4II расположены по оси X-X. Два полых цилиндра 4III, 4IV расположены по оси Y-Y. При этом ось 5-5 полого цилиндра 4III и ось 6-6 полого цилиндра 4IV параллельны оси Y-Y и расположены по разные стороны от нее на расстояниях l. Аналогично смещены по оси X-X на расстоянии l полые цилиндры 4I, 4II по направлению оси Z-Z.
Полые цилиндры соединены одними торцами в окрестности пересечения осей X-X, Y-Y и Z-Z.
В узлах ориентации 2I, 2II соответственно в электроизоляционных трубках 7I, 7II установлены первые электроды 8I, 8II, вторые электроды 9I, 9II, третьи электроды 10I, 10II и четвертые электроды 11I, 11II емкостных датчиков линейного положения по оси Y-Y и углового положения относительно оси Z-Z чувствительного элемента 3. В узлах ориентации 2III, 2IV в электроизоляционных трубках 7III, 7IV установлены первые электроды 8III, 8IV, вторые электроды 9III, 9IV, третьи электроды 10III, 10IV и четвертые электроды 11III, 11IV датчиков линейного положения по оси Z-Z и углового положения относительно оси X-X чувстительного элемента 3.
По оси X-X установлены два силовых преобразователя магнитоэлектрического типа, содержащих соответственно магнитные системы 12II, 12II с постоянными магнитами 13I, 13II в узлах ориентации 2I, 2II и компенсационные катушки 14I, 14II кольцевой формы на полых цилиндрах 4I, 4II. Оси компенсационных катушек 14I, 14II и магнитных систем 12I, 12II совмещены с осями полых цилиндров 4I, 4II соответственно.
По оси Y-Y установлены два силовых преобразователя, содержащих соответственно магнитные системы 12III, 12IV с постоянными магнитами 13III, 13IV в узлах ориентации 2III, 2IV и компенсационные катушки 14III, 14IV. Компенсационная катушка 14III установлена на полом цилиндре 4III. Оси компенсационной катушки 14IIIи магнитной системы 12III совмещены с осью 5-5 полого цилиндра 4III. Компенсационная катушка 14IV установлена на полом цилиндре 4IV. Оси компенсационной катушки 14IV и магнитной системы 12IV совмещены с осью 6-6 полого цилиндра 4IV.
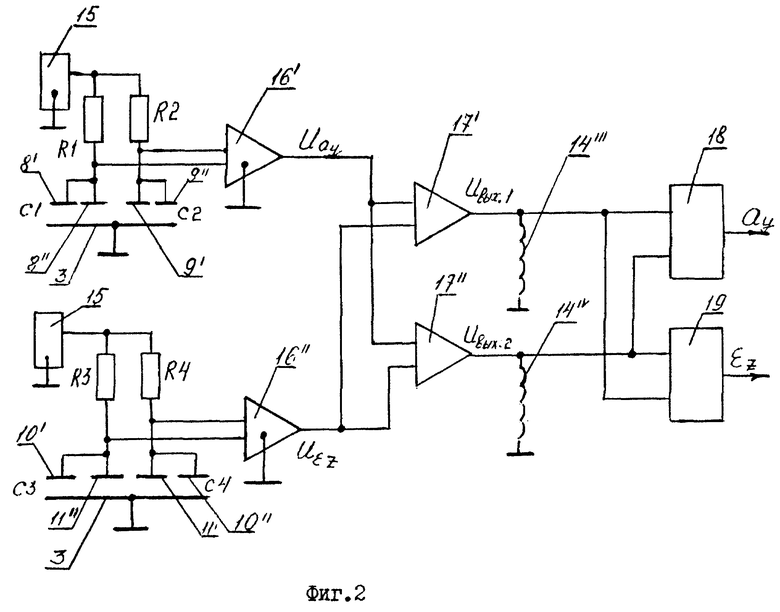
Датчик линейного положения (фиг.2) по оси Y-Y выполнен по мостовой схеме и содержит конденсатор C1, образованный соединенными вместе электродами 8I, 8II и электропроводной поверхностью чувствительного элемента 3, а также конденсатор C2, образованный соединенными вместе электродами 9I, 9II и электропроводной поверхностью чувствительного элемента 3. В два других плеча моста включены резисторы R1, R2.
Датчик углового положения относительно оси Z-Z, перпендикулярной осям X-X, Y-Y, содержит конденсатор C3, образованный соединенными вместе электродами 10I, 10II и электропроводной поверхностью чувствительного элемента 3, а также конденсатор C4, образованный соединенными вместе электродами 10II, 11I и электропроводной поверхностью чувствительного элемента 3.
В два плеча мостовой схемы датчика углового положения включены резисторы R3, R4. Датчики линейного и углового положений запитываются от источника 15 переменной ЭДС.
Выход датчика линейного положения подключен к входу первого дифференциального усилителя 16I, а выход датчика углового положения - к входу второго дифференциального усилителя 16II. Выход первого дифференциального усилителя 16I подключен к суммирующим входам первого суммирующего усилителя 17I и второго суммирующего усилителя 17II. Выход второго дифференциального усилителя 16II подключен к суммирующему входу первого суммирующего усилителя 17II и к инверсному входу второго суммирующего усилителя 17II.
К выходу первого суммирующего усилителя 17I подключена компенсационная катушка 14III одного силового преобразователя, расположенного по оси Y-Y. К выходу второго суммирующего усилителя 17II подключена компенсационная катушка 14IV второго силового преобразователя, расположенного по оси Y-Y. Выходы первого суммирующего усилителя 17I и второго суммирующего усилителя 17II подключены к двух входам сумматора 18, а также к двум входам устройства вычитания 19.
Преобразователь инерциальной информации на примере измерения линейного и углового ускорений по одной оси (фиг. 1) работает следующим образом. При наличии линейного ускорения Ay по оси Y-Y и углового ускорения εz относительно оси Z-Z, перпендикулярной осям X-X и Y-Y, на чувствительный элемент 3 действует инерционная сила F и динамический момент M:
F = may, (1)
где m - масса чувствительного элемента 3.
M = Jεz, (2)
где J - момент инерции чувствительного элемента относительно оси Z-Z.
Пусть направление линейного и углового ускорений таковы, что чувствительный элемент 3 поступательно перемещается по направлению к первым электродам 8I, 8II и третьим электродам 10I, 10II, и происходит угловое перемещение чувствительного элемента 3, при котором полый цилиндр 4I приближается к первому электроду 8I и третьему электроду 10I, а полый цилиндр 4II сближается со вторым электродом 9II и четвертым электродом 11II.
Тогда емкость конденсатора C1 (фиг.2) увеличивается, емкость конденсатора C2 уменьшается, происходит разбаланс мостовой схемы датчика линейного положения относительно оси Y-Y, и с ее выхода поступает сигнал на вход первого дифференциального усилителя 16I, выходной сигнал  которого пропорционален линейному ускорению:
которого пропорционален линейному ускорению:
где K1 - коэффициент преобразования каждого из дифференциальных усилителей 16I, 16II.
Одновременно увеличивается емкость конденсатора C3 и уменьшается емкость конденсатора C4, происходит разбаланс мостовой схемы датчика углового положения относительно оси Z-Z, перпендикулярной осям X-X и Y-Y. После усиления сигнала разбаланса во втором дифференциальном усилителе 16II напряжение  на его выходе пропорционально угловому ускорению:
на его выходе пропорционально угловому ускорению:
После суммирования в первом суммирующем усилителе 17I его выходной сигнал Uвых.1 имеет вид:
где K2 - коэффициент преобразования каждого из суммирующих усилителей 17I, 17II.
На выходе второго суммирующего усилителя 17II получается напряжение Uвых.2:
В магнитоэлектрическом силовом преобразователе при взаимодействии магнитного потока, создаваемого током компенсационной катушки, с магнитным полем постоянного магнита, электрический сигнал преобразуется в механическую силу. Поэтому при наличии на выходе первого суммирующего усилителя 17I выходного напряжения Uвых.1 посредством компенсационной катушки 14III создается компенсационная сила Fk1 одного силового преобразователя по оси Y-Y:
Fк1 = KUвых.1 = Kk1k2(ay+εz), (7)
где K - коэффициент преобразования каждого силового преобразователя.
Посредством компенсационной катушки 14IV второго силового преобразователя по оси Y-Y компенсационная сила FK2:
Fк2 = KUвых.2 = Kk1k2(ay-εz) (8)
Суммарная компенсационная сила FK двух силовых преобразователей по оси Y-Y.
FK = FK1 + FK2 = 2Kk1k2Ay (9)
Компенсационный момент MK вследствие неравенства сил FK1 и FK2 относительно оси Z-Z на плече 2l:
Mк = 2(Fк1-Fк2)l = 4Kk1k2lεz (10)
Посредством компенсационной силы FK уравновешивается инерционная сила F, и чувствительный элемент 3 возвращается в исходное состояние по оси Y-Y. Посредством компенсационного момента MK уравновешивается динамический момент M, и ограничивается поворот чувствительного элемента 3 относительно оси Z-Z.
Таким образом, при расположении осей 5-5 и 6-6 полых цилиндров 4III, 4IV параллельно оси Y-Y на расстояниях l от нее и при установке соосно с осями 5-5 и 6-6 компенсационных катушек 14III и 14IV и магнитных систем 12III, 12IV магнитоэлектрических силовых преобразователей по оси Y-Y обеспечивается компенсация инерционной силы, действующей на чувствительный элемент 3 от линейного ускорения по оси Y-Y, и динамического момента, действующего на чувствительный элемент 3 от углового ускорения относительно оси Z-Z, перпендикулярной осям X-X и Y-Y.
При аналогичном выполнении и расположении остальных четырех полых цилиндров чувствительного элемента 3 и силовых преобразователей обеспечивается компенсация инерционных сил и динамических моментов по остальным осям преобразователя инерциальной информации.
После суммирования в сумматоре 18 выходных сигналов первого суммирующего усилителя 17I и второго суммирующего усилителя 17II на его выходе получается сигнал U1, пропорциональный измеряемому линейному ускорению ay:
U1 = Uвых.1 + Uвых.2 = 2k1k2Ay (11)
После преобразования в устройстве вычитания 19 выходных сигналов первого 17I и второго 17II суммирующих усилителей на его выходе получается сигнал U2, пропорциональный измеряемому угловому ускорению εz:
U2 = Uвых.1-Uвых.2 = 2k1k2εz (12)
Таким образом производится измерение линейного ускорения по оси Y-Y и углового ускорения относительно оси Z-Z.
Аналогично в преобразователе инерциальной информации измеряются линейные и угловые ускорения по другим осям.
Источники информации
1. Патент Франции N 2511509, кл. G 01 P 15/125. Трехосный акселерометр с электростатическим подвесом крестовидной контрольной массы.
2. Патент РФ N 2100779, кл. G 01 C 21/12. Преобразователь инерциальной информации, 1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
Изобретение предназначено для измерения линейных и угловых ускорений. Преобразователь содержит основание, чувствительный элемент из шести полых цилиндров, расположенных попарно по трем взаимно перпендикулярным осям, узлы ориентации, датчики углового и линейного положений, силовые преобразователи магнитоэлектрического типа с компенсационными катушками на чувствительном элементе и магнитными системами с постоянными магнитами в узлах ориентации, дифференциальные и суммирующие усилители. Чувствительный элемент выполнен с расположением осей полых цилиндров со смещением относительно друг друга в каждой паре полых цилиндров по каждой из трех осей, магнитоэлектрические силовые преобразователи по каждой оси выполнены с расположением компенсационных катушек и магнитных систем соосно с осями полых цилиндров, что обеспечивает повышение точности измерения. 2 ил.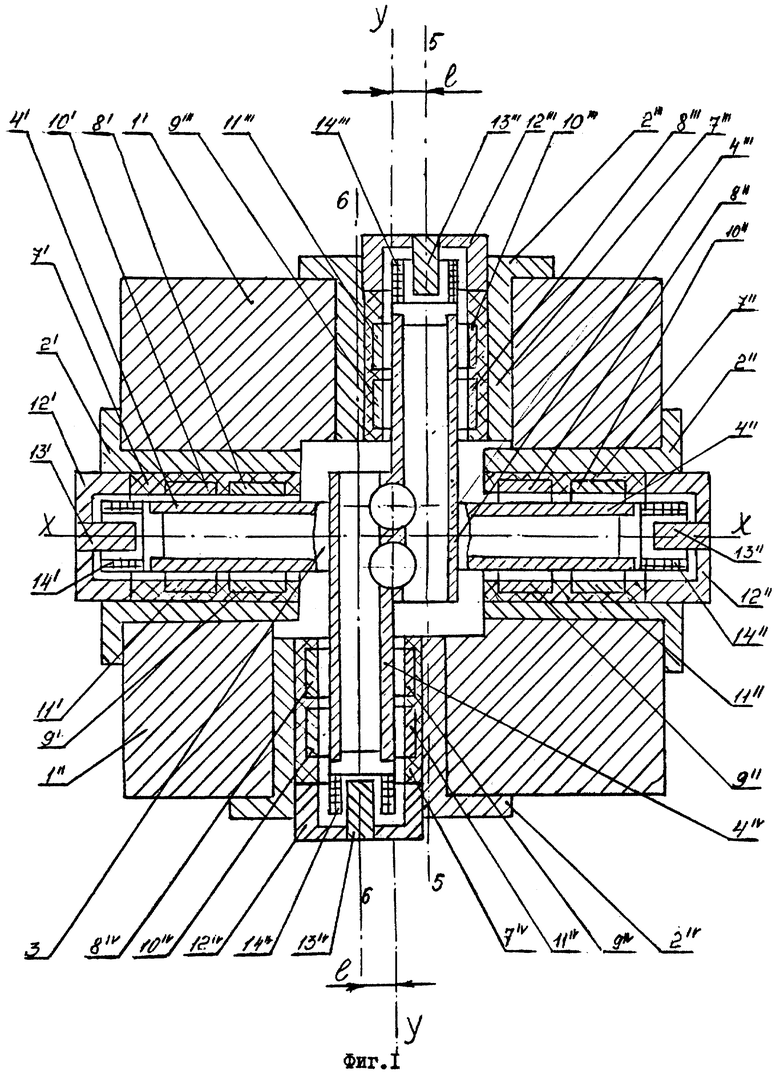
Преобразователь инерциальной информации, содержащий основание, чувствительный элемент в виде единого элемента из шести полых цилиндров, объединенных одними своими торцами и расположенных попарно по каждой из трех взаимно перпендикулярных осей, узлы ориентации чувствительного элемента в основании, датчики линейного положения чувствительного элемента по каждой оси, датчики углового положения чувствительного элемента относительно каждой оси, два силовых преобразователя магнитоэлектрического типа по каждой оси, которые выполнены с расположением направления действия их силы вдоль данной оси по разные стороны от данной оси относительно друг друга и каждый из которых содержит компенсационную катушку на чувствительном элемента и магнитную систему с постоянным магнитом в узле ориентации, содержащий первый дифференциальный усилитель по каждой оси, к входу которого подключен датчик линейного положения по данной оси, второй дифференциальный усилитель по каждой оси, к входу которого подключен датчик углового положения относительно данной оси, первый и второй суммирующие усилители по каждой оси, причем по каждой оси выходы первого и второго дифференциальных усилителей подключены к суммирующим входам первого суммирующего усилителя, к суммирующему входу второго суммирующего усилителя подключен выход одного из дифференциальных усилителей, к инверсному входу второго суммирующего усилителя подключен выход другого дифференциального усилителя, к выходу первого суммирующего усилителя подключена компенсационная катушка одного силового преобразователя, к выходу второго суммирующего усилителя подключена компенсационная катушка другого силового преобразователя из двух силовых преобразователей, размещенных по одной оси, отличающийся тем, что чувствительный элемент выполнен с расположением осей полых цилиндров со смещением относительно друг друга в каждой паре полых цилиндров по каждой из трех взаимно перпендикулярных осей, магнитоэлектрические силовые преобразователи по каждой оси выполнены с расположением компенсационных катушек и магнитных систем соосно с осями полых цилиндров.
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |

