Изобретение относится к автоматизированным электроприводам при управлении скоростью двигателя постоянного тока независимого возбуждения изменением напряжения на зажимах якоря.
Статические системы подчиненного регулирования € пропорциональным регулятором скорости имеют фиксированное падение э.д.с. (скорости) двигателя при приложении нагрузки. Например, величина падения э.д.с. в трехконтурной системе Г-Д в установившемся режиме определяется следующим выражением:
8Г„
4-.,
-
де
статическое установившееся падение э.д.с. двигателя при приложении нагрузки; T.i - эквивалентная малая постоянная
времени системы; STij. -постоянная времени пронорционального регулятора скорости; Тм - электромеханическая постоянная
времени привода;
/с - установившийся ток нагрузки; RU - полное сопротивление якорной цепи Г-Д.
Из приведенного выражения падение э.д.с. вигателя, вызванное приложением нагрузки.
При маопределяется соотношением
т
лой величине постоянной времени Тм падение э.д.с. двигателя в оптимизированной системе 5 велико и может быть больше падения э.д.с. двигателя в разомкнутой системе Г-Д.
В подобных случаях при малой величине постоянной времени Тм для уменьшения статического падения скорости используют или
0 пропорционально-интегральный регулятор скорости, или шунтируют емкость пропорционально-интегрального регулятора скорости. В -первом случае получают астатическую систему Г-Д, во втором -систему с регулируе5 мым статизмом.
Существенным недостатком такого формирования переходных процессов по нагрузке в системе с подчиненным регулированием является изменение свойств системы по управлению, причем быстродействие системы уменьшается, что приводит к уменьшению производительности механизма.
Отличие рассматриваемого устройства заключается в создании электропривода с регулируемым статизмом на основе использования системы подчиненного регулирования с пропорциональным регулятором скорости. Цель изобретения состоит в отделении настройки процессов по нагрузке от настройки процессор
0 по управлению, в результате чего регулирование статизма по нагрузке не уменьшает быстродействия привода по управлению. При этом качество переходных процессов и быстродействие по управлению остаются неизменными и такими же, как и у исходной статической сиетемы с пропорциональным регулятором скорости.
Указанная цель достигается тем, что узел установления величины жесткости содержит модель системы регулирования, элемент сравнения сигналов выхода модели и датчика скорости и компенсирующее звено, причем вход модели подключен к выходу задатчика интенсивности, а выход элемента сравнения через комплектующее звено подключен ко входу регулятора скорости.
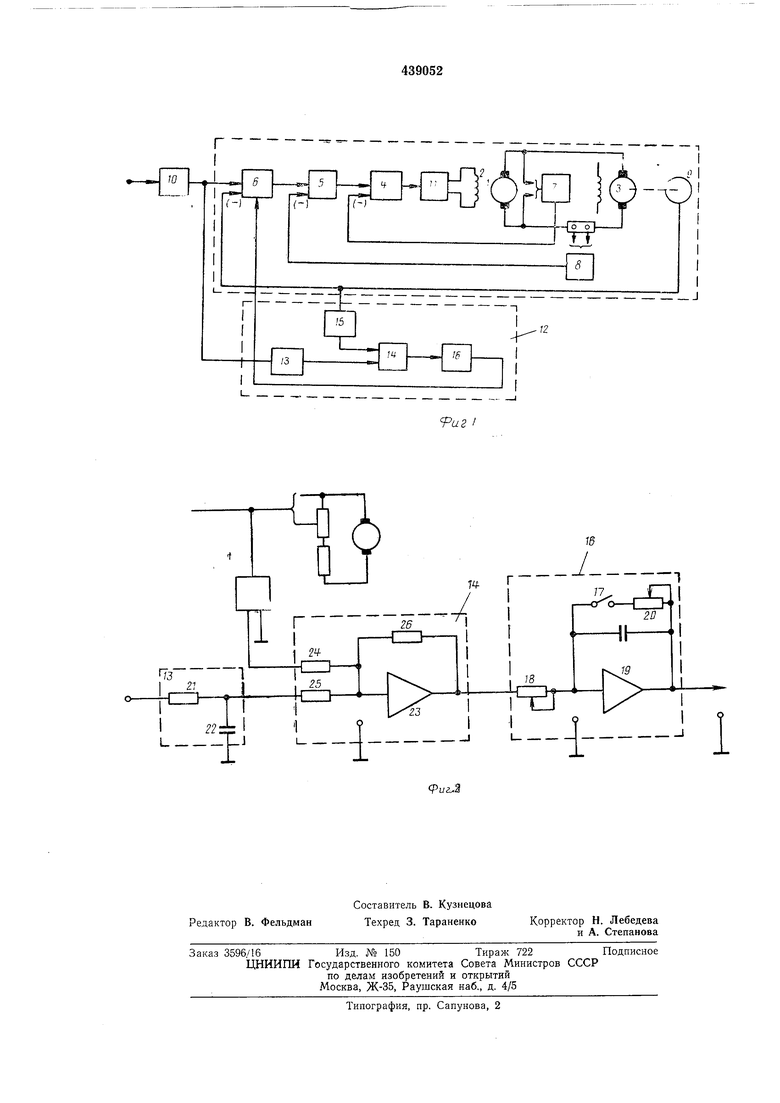
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - возможный вариант принципиальной схемы узла установления жесткости.
На фиг. 1 представлена трехконтурная система Г-Д с подчиненным регулированием. Она содержит генератор 1 постоянного тока с обмоткой возбуждения 2 и двигатель постоянного тока 3. Система регулирования содержит пропорционально-интегральный регулятор напряжения 4, пропорционально-интегральный регулятор тока 5 и пропорциональный регулятор скорости 6. Ко входам указанных регуляторов подключены соответственно выходы датчика нанряжения 7, датчика тока 8 и датчика скорости 9.
Управление скоростью двигателя осуществляется от интегрального задатчика интенсивности 10. Результирующий сигнал системы управления на выходе регулятора напряжения 4, усиленный по мощности тиристорным возбудителем ill, формирует требуемый закон изменения напряжения на обмотке возбуждения 2 генератора 1. Узел установления лсесткости 12 состоит из модели 13 системы регулирования (например, аналоговой), вход которой связан с выходом задатчика интенсивности 10. В элементе сравнения 14 осуществляется алгебраическое суммирование выходного напряжения модели 12 с сигналом обратной связи по скорости, снимаемым с датчика напряжения 15, включенного в якорную цепь датчика скорости 9. Выход элемента 14 соединен со входом компенсирующего звена 16, которое определяет характер компенсирующего сигнала, подаваемого на вход пропорционального регулятора скорости 6. Модель с достаточной степенью точности описывает свойства системы регулирования при управлеНИИ от задатчика интенсивности 10. Поэтому при работе вхолостую двигателя 3 входной сигнал элемента сравнения 14 равен нулю, узел 12 не оказывает влияния на работу электропривода.
При приложении нагрузки к валу двигателя 3 сигнал обратной связи по скорости
уменьшается в сравнении с сигналом модели 13. В этом случае выходное напряжение элемента 14 представляет собой сигнал ощибки по скорости двигателя. Сигнал ошибки поступает на вход компенсирующего звена 16, передаточная функция которого определяется характером требований к статизму системы.
В случае, если необходима полная компенсация падения скорости при приложении нагрузки, то компенсирующее звено 16 является интегратором (см. фиг. 2), ключ 17 разомкнут. Система астатическая первого порядка по нагрузке.
Если нет необходимости в полной компенсации, требуется лишь частичная компенсация падения скорости при приложении нагрузки, то звено 16 выполняется в виде инерционного звена первого порядка (ключ 17 разомкнут) с регулируемым коэффициентом усиления (изменением величины сопротивления 18 на входе усилителя 19) и с регулируемой постоянной времени (изменением величины сопротивления 20 в цепи обратной связи усилителя 19).
Модель 13, выполненная в виде цепочки из резистора 21 и конденсатора 22, лищь приближенно описывает свойства системы регулирования по управлению. Более точное описание этих свойств возможно с применением более сложной модели (например, построенной на двух операционных усилителях).
Элемент сравнения 14 вынолнен в виде усилителя 23 с входными резисторами 24, 25 и резистором 26 в цепи обратной связи.
Изобретение может быть использовано не только в трехконтурной системе Г-Д, но и в двухконтурной статической системе преобразователь - двигатель с подчиненным регулированием, а также в любой другой системе управления скоростью двигателя постоянного тока, имеющей задатчик интенсивности и отрицательную обратную -связь по скорости двигателя.
Предмет изобретения
Устройство для регулирования скорости электродвигателя постоянного тока, содержащее задатчик интенсивности, пропорциональный регулятор скорости и узел установления величины жесткости регулировочных характеристик электродвигателя, отличающееся тем, что, с целью улучшения качества переходных процессов по управлению при высокой жесткости характеристик электропривода, узел установления величины жесткости содержит модель системы регулирования, подключенную к одному из входов элемента сравнения, второй вход которого соединен с датчиком скорости, а выход через компенсирующее звено со входом регулятора скорости, причем вход модели соединен с выходом задатчика интенсивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод по системе генератор-двигатель с подчиненным регулированием | 1978 |
|
SU896732A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1973 |
|
SU406285A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВ1)ДОМПОСТОЯННОГО ТОКА | 1971 |
|
SU418949A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| БСЕСОЮЗг^АЛШ'\'?»'81;Т5ЬТ ^3?fUiU]- | 1973 |
|
SU373823A1 |
| Устройство программного управления приводом кантователя | 1981 |
|
SU1031545A1 |
| Вентильный электропривод с периодической нагрузкой | 1977 |
|
SU729797A1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
(У
г .
