КФн1Япа- G кодКпр- h Vn7Rflp - ДМ-rp пр -FRnp 0; (10) Кфм1«сп, GkOARnp + h Vcni Rnp + ЛМТ|г np + F R „р О (Ю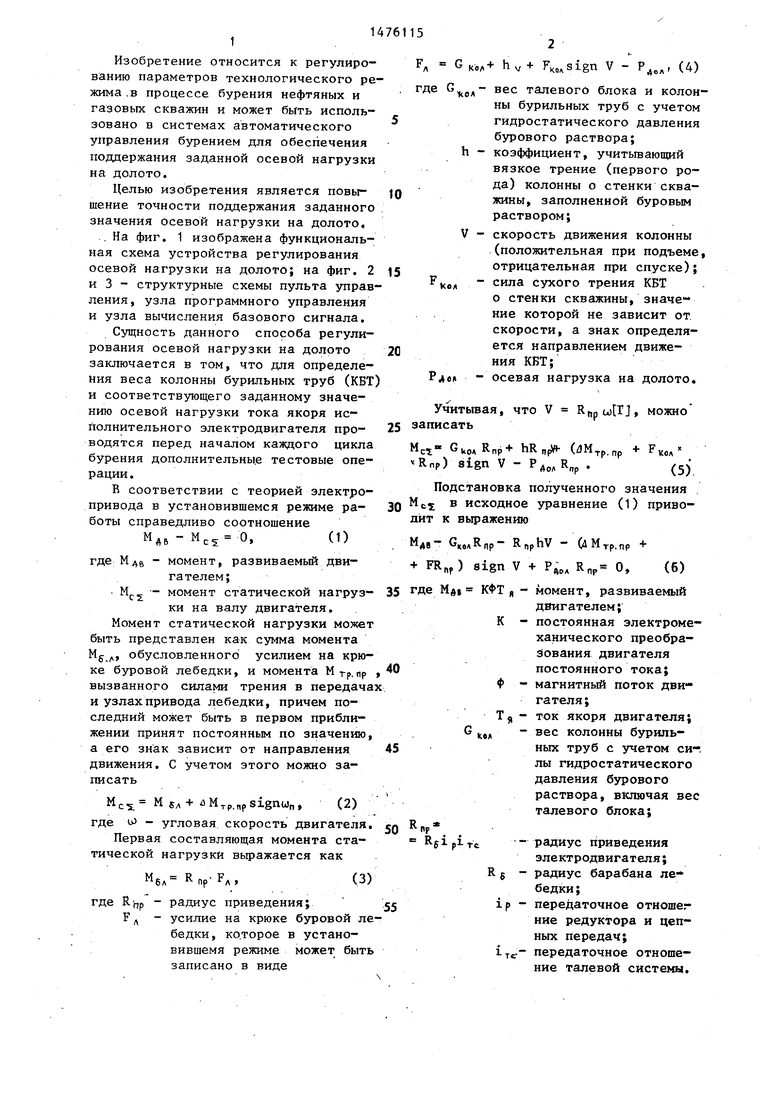

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Система программного управления инерционным вибропресс-молотом | 1986 |
|
SU1366271A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ САХАРОВА А.В. | 1992 |
|
RU2021499C1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Способ автоматического поддержания заданной нагрузки на долото и устройство для его осуществления | 1986 |
|
SU1361314A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Устройство управления скоростным режимом группы приводов | 1977 |
|
SU753507A1 |
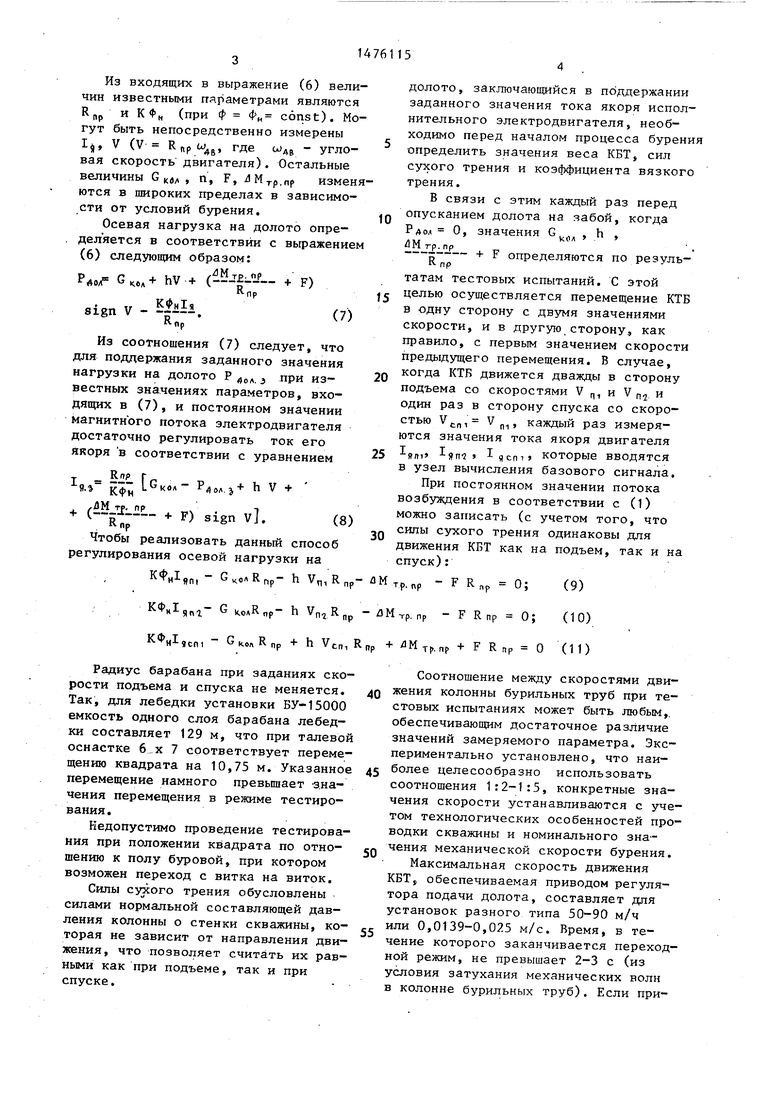
Изобретение относится к бурению и позволяет повысить точность поддержания осевой нагрузки (ОН) на долото. Регулирование ОН осуществляется путем изменения тока якоря исполнительного электродвигателя (ЭД). Для определения тока якоря, соответствующего заданному значению ОН, перед началом каждого цикла бурения проводят тестирование. При этом колонну бурильных труб перемещают в одном направлении с двумя фиксированными скоростями, значения которых находятся в соотношении 2:1-5:1, а в другом направлении с одной из них. Каждый раз измеряют ток якоря и определяют коэффициент вязкого трения, массу бурового инструмента и момент сил трения. В соответствии с соотношением, взаимосвязывающим перечисленные параметры, а также характеристики ЭД и заданное значение ОН, определяется требуемое значение тока якоря. Устройство регулирования ОН содержит датчики скорости 8 и тока 9, узлы программного управления 5 и вычисления базового сигнала 6, регуляторы скорости 3 и тока 4, пульт 2 управления, коммутатор 7 и тиристорный преобразователь с ЭД 1. В режиме тестирования узлом 5 задаются, а регуляторами 3 и 4 обеспечиваются требуемые режимы перемещения бурильной колонны. Соответствующий заданному значению ОН ток якоря рассчитывается в узле 6, а его поддержание осуществляется регулятором 4. 3 ил.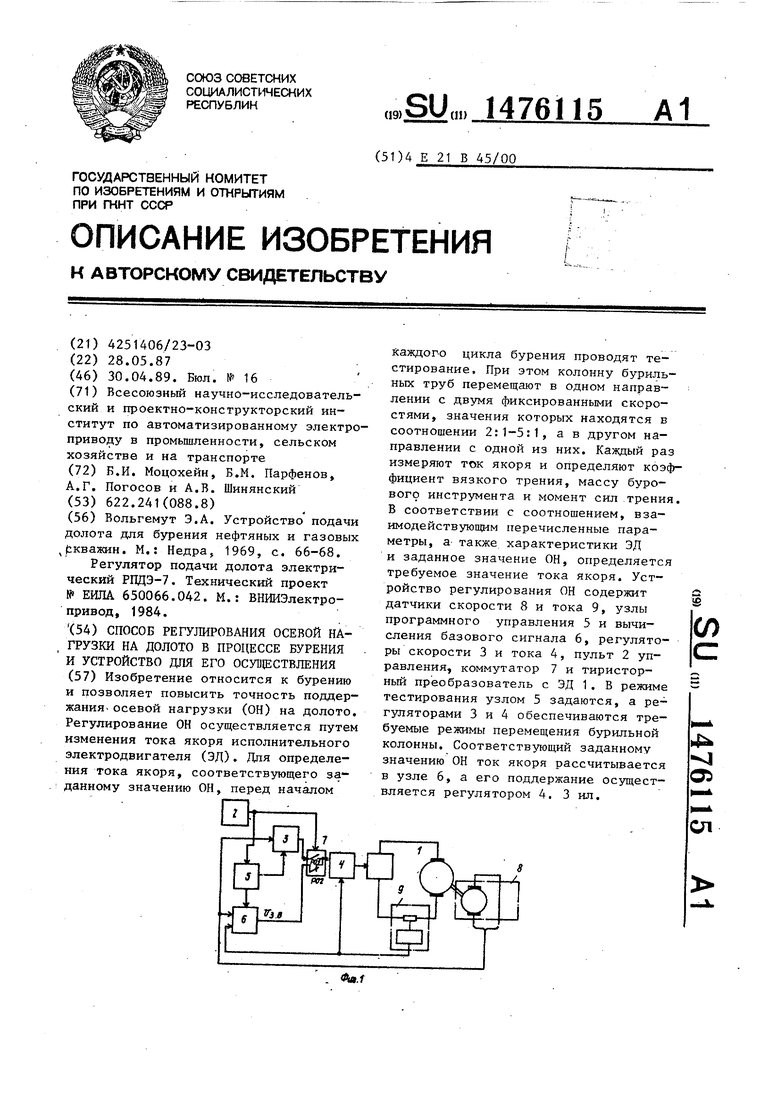
Радиус барабана при заданиях скорости подъема и спуска не меняется. Так, для лебедки установки БУ-15000 емкость одного слоя барабана лебедки составляет 129 м, что при талевой оснастке 6x7 соответствует перемещению квадрата на 10,75 м. Указанное перемещение намного превышает значения перемещения в режиме тестирования.
Недопустимо проведение тестирования при положении квадрата по отношению к полу буровой, при котором возможен переход с витка на виток.
Силы сухого трения обусловлены силами нормальной составляющей давления колонны о стенки скважины, которая не зависит от направления движения, что позволяет считать их равными как при подъеме, так и при спуске.
Соотношение между скоростями дви- жения колонны бурильных труб при тестовых испытаниях может быть любым, обеспечивающим достаточное различие значений замеряемого параметра. Экспериментально установлено, что наи- более целесообразно использовать соотношения 1:2-1:5, конкретные значения скорости устанавливаются с учетом технологических особенностей проводки скважины и номинального значения механической скорости бурения.
Максимальная скорость движения КБТ, обеспечиваемая приводом регулятора подачи долота, составляет для установок разного типа 50-90 м/ч или 0,0139-0,075 м/с. Время, в те
чение которого заканчивается переходной режим, не превышает 2-3 с (из условия затухания механических волн в колонне бурильных труб). Если принять, что предлагаемое тестирование осуществляется при V 0,025 м/с
в течение 3 с, то путь перемещения КБТ за это время не превысит 0,075 м что существенно меньше длины квадрата (1Кв 13-14 м). С целью повышения точности измерений целесообразно выб рать Vni и Vtt максимальными для данного колеса установки.
Если Vni является максимальной
ги скоростью, то необходимо обеспечить
ISL -,
2
v Ха.
v пг
(12)
Указанные тестовые испытания проводятся с целью определения коэффициента Ь1- учитывающего вязкое трение. Суть расчета сводится к тому, что
Увеличение Vn5боле дит к уменьшению знам веденной расчетной фо следствие, к росту по шение Vni ниже 1/5 Vn с точки зрения точнос h, но при этом усложн поддержания заданного
20 Из (9) и (10) находят
ь l-M -EH1 (u)
К Dt -V nt)
Из (9) и (11) находят
ДМтр-«if КФн( -IviM ) , ,,-, Ј+ j. n vnr UJJ
4 K. np-i - np
ко
Из (9) и (11) находят Ф «ШЛ11±1-ШЛ.1
2R
np
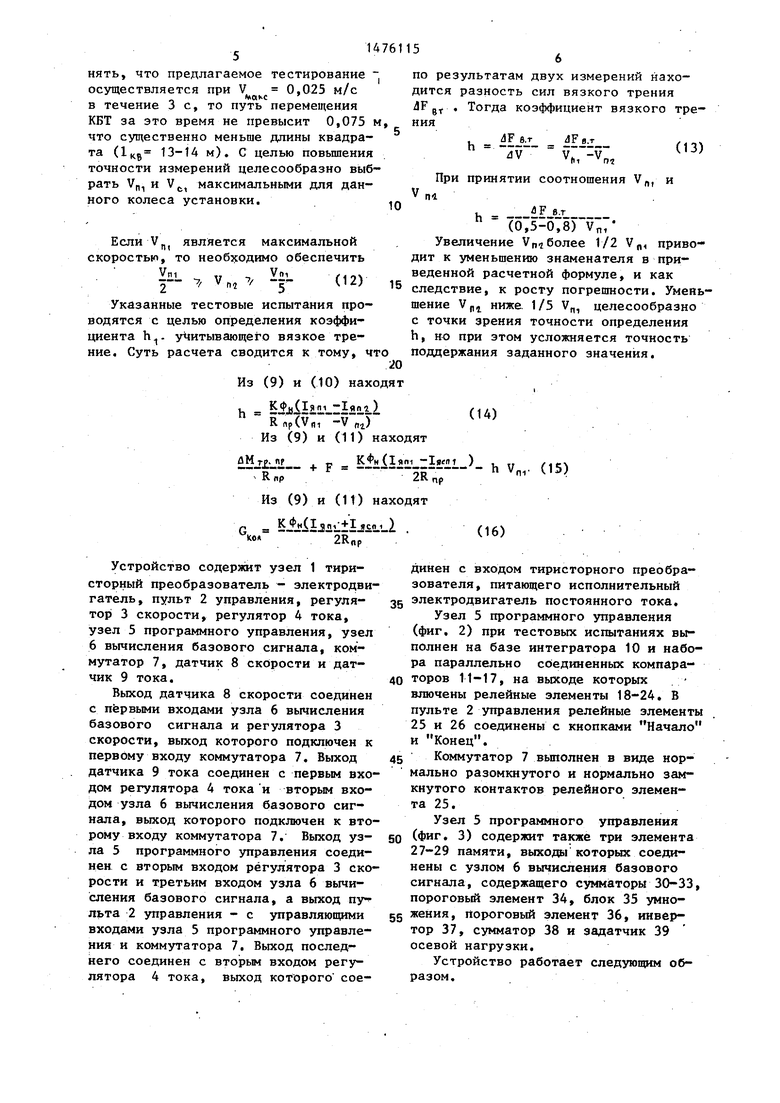
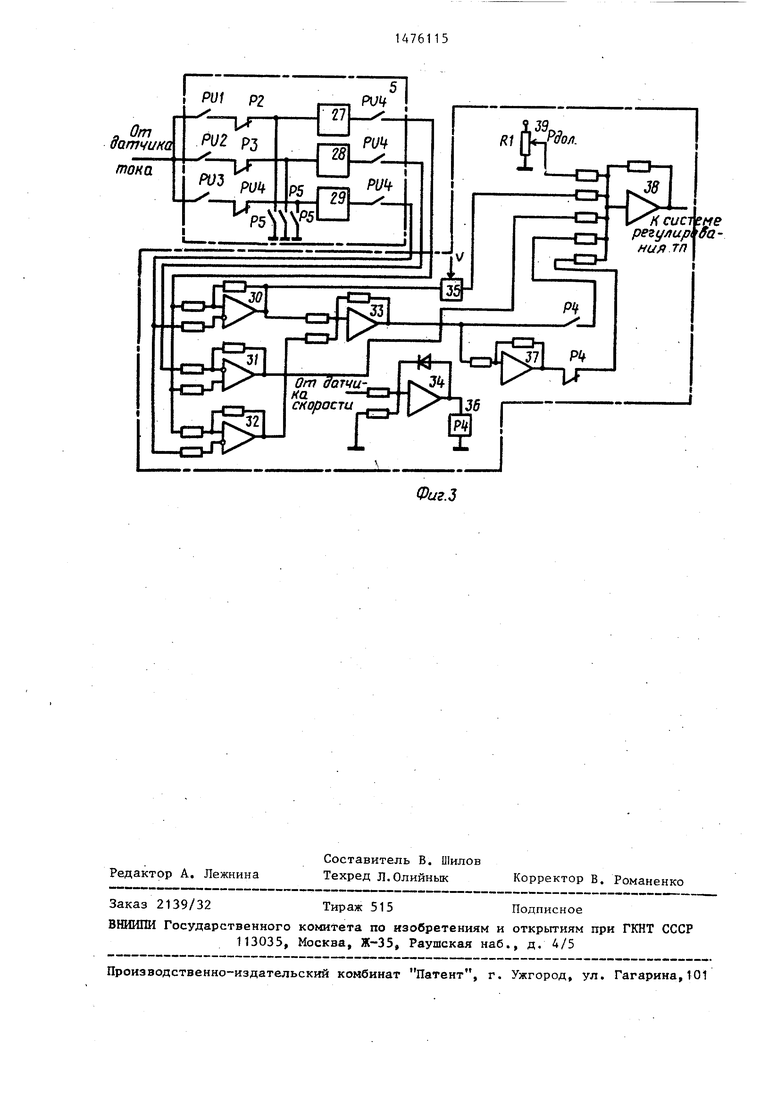
Устройство содержит узел 1 тири- сторный преобразователь - электродвигатель, пульт 2 управления, регулятор 3 скорости, регулятор 4 тока, узел 5 программного управления, узел 6 вычисления базового сигнала, коммутатор 7, датчик 8 скорости и датчик 9 тока.
Выход датчика 8 скорости соединен с первыми входами узла 6 вычисления базового сигнала и регулятора 3 скорости, выход которого подключен к первому входу коммутатора 7. Выход датчика 9 тока соединен с первым входом регулятора 4 тока и вторым входом узла 6 вычисления базового сигнала, выход которого подключен к второму входу коммутатора 7. Выход узла 5 программного управления соединен с вторым входом регулятора 3 скорости и третьим входом узла 6 вычисления базового сигнала, а выход пульта 2 управления - с управляющими входами узла 5 программного управления и коммутатора 7. Выход последнего соединен с вторым входом регулятора 4 тока, выход которого соепо результатам двух измерений находится разность сил вязкого трения
JF8r ния
. Тогда коэффициент вязкого тре
ЛРв.т
v, -V
(13)
При принятии соотношения Vn, и VM
h . UF ъг
(о,5-578) v;/
Увеличение Vn5более 1/2 Vn, приводит к уменьшению знаменателя в приведенной расчетной формуле, и как следствие, к росту погрешности. Уменьшение Vni ниже 1/5 Vni целесообразно с точки зрения точности определения h, но при этом усложняется точность поддержания заданного значения.
(16)
динен с входом тиристорного преобразователя, питающего исполнительный
электродвигатель постоянного тока. Узел 5 программного управления (фиг. 2) при тестовых испытаниях выполнен на базе интегратора 10 и набора параллельно соединенных компараторов 11-17, на выходе которых влючены релейные элементы 18-24. В пульте 2 управления релейные элементы 25 и 26 соединены с кнопками Начало и Конец.
Коммутатор 7 выполнен в виде нормально разомкнутого и нормально замкнутого контактов релейного элемента 25.
Узел 5 программного управления
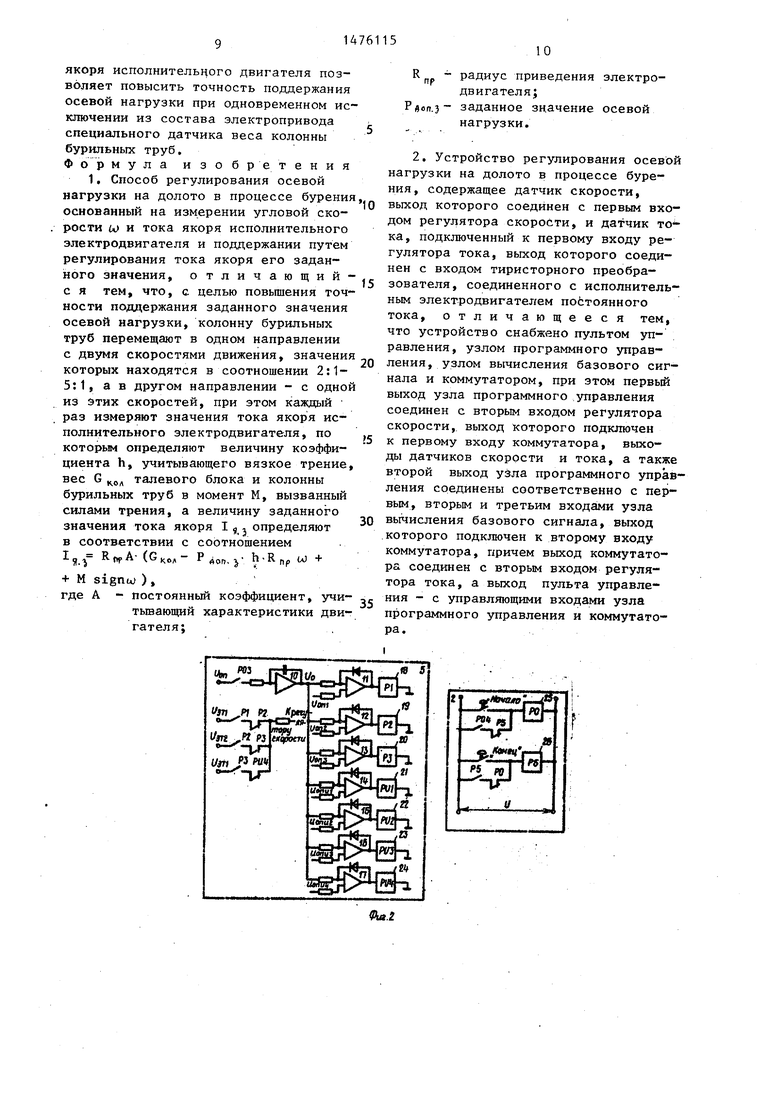
(фиг. 3) содержит также три элемента 27-29 памяти, выходы которых соединены с узлом б вычисления базового сигнала, содержащего сумматоры 30-33, пороговый элемент 34, блок 35 умножения, пороговый элемент 36, инвертор 37, сумматор 38 и эадатчик 39 осевой нагрузки.
Устройство работает следующим образом.
При включении регулятора осевой нагрузки на долото узел 5 программнго управления задает режимы тестовых испытаний через регулятор 3 скорости вырабатывая три различных значения сигнала задания скорости движения КБТ которые через регуляторы скорости 3 и тока 4 подаются на тиристорный преобразователь. Для каждого значения тестовой скорости с помощью датчиков 8 и 9 измеряются значения тока якоря и скорости вращения исполнительного двигателя, которые запоминаются в элементах памяти узла 5.
По окончании тестовых испытаний регулятор 3 скорости отключается, а с помощью регулятора 4 тока поддерживается необходимое заданное значение тока якоря исполнительного двигателя, соответствующее необходимому заданному значению осевой нагрузки на долото.
Программа тестовых испытаний начинается при нажатии на кнопку На- чало пульта 2 управления. При этом срабатывает релейный элемент 25, первые два контакта которого в коммутаторе 7 переключаются, третий замыкается и напряжение с источника опорного напряжения подается на вход интегратора 10, а четвертый - блокирует кнопку Начало. На выходе интегратора 10 появляется напряжение Ue, пропорциональное времени. Это напряжение подается на первые входы компараторов 11-17, на вторые входы этих компараторов подается опорное напряжение Uon , противоположное по знаку напряжению на выходе интегратора 10. До тех пор, пока напряже- ние на выходе интегратора 10 меньше опорного напряжения на втором входе соответствующего компаратора, напряжение на его выходе равно нулю, а при U 0 7 U оп на выходе j-го компара тора скачком появится напряжение, благодаря чему сработает включенный на его выходе релейный элемент.
Опорные напряжения Uen. подобраны такими, что первым после начала ра- боты узла программного управления срабатывает релейный элемент 18, через замыкающий контакт которого подается сигнал задания скорости иэт, на вход регулятора 3 скорости. Через промежуток времени, соответствующий окончанию переходного процесса, срабатывает релейный элемент
,-
10
15
20
нохи, Т, евя
25де 35 ®
50 55
30
45
21, который своим замыкающим контактом подключает выход датчика 9 тока к элементу 27 памяти. Через интервал времени, достаточный для запоминания сигнала в элемент 27, срабатывает релейный элемент 19, при этом на вход регулятора 3 скорости подается сигнал Vjr2; затем с помощью элемента 22 осуществляется запоминание в элементе 28 сигнала с датчика 9 тока при новом значении скорости. На третьем этапе при помощи релейных элементов 20 и 23 производится задание обратного по знаку значения скорости и запоминание в элемент 23 соответствующего сигнала с датчика 9 тока
По окончании записи сигнала с датчика 9 тока в элемент 29 памяти срабатывает релейный элемент 24, замыкающие контакты которого подключают выходы элементов 27-29 памяти к входам узла 6 вычисления базового сигнала. Вычисления по формулам (14) (15) и (16) выполняются с помощью сумматоров 31, 32 и 30, а формирование сигнала задания тока якоря по формуле (8) осуществляется с помощью сумматора 38, на вход которого поступают сигналы с задатчика 39 осевой нагрузки, блока 35 умножения, выхода сумматора 31 и в зависимости от знака скорости перемещения колонны бурильных труб с сумматора 33 или инвертора 37 через переключающие контакты релейного элемента 36. На вход сумматора 33 подаются сигналы с выхода сумматоров 30 и 32, благодаря чему в соответствии с формулами (14) и (15) сигнал на его выходе пропорционален суммарному усилию сухого трения в системе. Для выбора знака этого усилия, т.е. для реализации функции sign V, используется пороговый элемент 34 вместе с релейным элементом 36.
По окончании цикла бурения с помощью кнопки Конец включается релейный элемент 26, элементы 27-29 памяти приводятся в исходное состояние, а коммутатор 7 на вход регулятора 4 тока подает значение 1ЯЗ, которое необходимо поддерживать:
,} RnpA(GkOA- Pfta + h R пР ui +
+ M sign ы).
(17)
Реализация данного способа регулирования осевой нагрузки по току
якоря исполнительного двигателя позволяет повысить точность поддержания осевой нагрузки при одновременном исключении из состава электропривода специального датчика веса колонны бурильных труб. Формула изобретения
Чгсоответствии с (СКОЛ-
+ М signw ) ,
где А - постоянный коэффициент, учи- „ тывающий характеристики двигателя;
R п - радиус приведения электродвигателя j
РЯОП.З заданное значение осевой нагрузки.
,
0
i
а s
л Wff I
датчика
тока
Фиг.З
| Вольгемут Э.А | |||
| Устройство подачи долота для бурения нефтяных и газовых кважин | |||
| М.: Недра, 1969, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.: ВНИИЭлектро- привод, 1984. | |||
