Группа изобретений относится к устройствам для ремонта рельсового пути и способам его ремонта.
Известна шпалоподбивочная машина для одновременной подбивки большого количества шпал рельсового пути, содержащая машинную раму, опирающуюся на ходовые тележки, два шпалоподбивочных агрегата для нескольких шпал, выполненных для одновременной подбивки не менее двух шпал, расположенных рядом друг за другом в продольном направлении машины и имеющих погружаемые попарно в балласт с помощью соответствующих приводов подачи на глубину шпалоподбойки, подъемно-рихтовочный агрегат, базовую систему для выполнения корректировки положения рельсового пути, при этом расстояние между двумя обращенными друг к другу находящимися в своей исходной позиции для подбивки шпалы шпалоподбойками каждого шпалоподбивочного агрегата для нескольких шпал равно расстоянию между шпалами (патент US 4094250, кл. E 01 B 27/17, 1978 г.).
Техническим результатом изобретения является обеспечение установки рельсового пути в точное положение на длительное время при высокой производительности подбивки рельсового пути.
Для достижения этого технического результата в шпалоподбивочной машине для одновременной подбивки большого количества шпал рельсового пути, содержащей машинную раму, опирающуюся на ходовые тележки, два шпалоподбивочных агрегата для подбивки нескольких шпал, выполненных для одновременной подбивки не менее двух шпал, расположенных рядом друг за другом в продольном направлении машины и имеющих погружаемые попарно в балласт с помощью соответствующих приводов подачи на глубину шпалоподбойки, подъемно-рихтовочный агрегат, базовую систему для выполнения корректировки положения рельсового пути, при этом расстояние между двумя обращенными друг к другу находящимися в своей исходной позиции для подбивки шпалы шпалоподбойниками каждого шпалоподбивочного агрегата для подбивки нескольких шпал равно расстоянию между шпалами, две смежные, расположенные в продольном направлении машины шпалоподбойки обоих шпалоподбивочных агрегатов для подбивки нескольких шпал удалены друг от друга на расстояние, соответствующее расстоянию между шпалами, а шпалоподбойки каждой пары направлены навстречу друг другу.
Кроме того, подъемно-рихтовочный агрегат расположен между шпалоподбивочными агрегатами для подбивки нескольких шпал, а машина снабжена вторым подъемно-рихтовочным агрегатом, расположенным перед передним в рабочем направлении движения машины шпалоподбивочным агрегатом для подбивки нескольких шпал, причем между шпалоподбивочными агрегатами для подбивки нескольких шпал расположен перемещающийся на копирных роликах по рельсовому пути и перемещающийся по вертикали копирный элемент, взаимодействующий через чувствительный элемент соответствующего датчика с базовой линией упомянутой базовой системы, оба шпалоподбивочных агрегата для подбивки нескольких шпал закреплены на рабочей раме, расположенной вдоль машины и опирающейся своим задним в рабочем направлении машины концом при помощи ходовой тележки на рельсовый путь, а передним концом опирающейся на машинную раму с возможностью перемещения вдоль машины при помощи привода подачи, оба шпалоподбивочных агрегата для подбивки нескольких шпал закреплены на рабочей раме, расположенной вдоль машины и опирающейся своими концами при помощи ходовых тележек на рельсовый путь, при этом шпалоподбивочная машина снабжена дополнительной шпалоподбивочной машиной, шарнирно соединенной с машинной рамой и имеющей опирающуюся на ходовые тележки раму с перемещающимися по вертикали шпалоподбивочным агрегатом для подбивки одной шпалы, шпалоподбивочная машина и дополнительная шпалоподбивочная машина выполнены с собственными ходовыми приводами для независимых передвижений и соединены с помощью сцепления для совместного передвижения, рама дополнительной шпалоподбивочной машины соединена с помощью шарнира с расположенной впереди машинной рамой, рама дополнительной шпалоподбивочной машины соединена с машинной рамой с возможностью перемещения в продольном направлении с помощью привода подачи, шпалоподбивочный агрегат для подбивки одной шпалы расположен на направляющей с возможностью перемещения по ней при помощи привода продольной подачи, а направляющая соединена с машинной рамой и расположена вдоль машины, причем шпалоподбивочный агрегат для подбивки одной шпалы выполнен с приводом подачи по вертикали, а упомянутый привод продольной подачи выполнен для автоматического включения с пульта управления шпалоподбивочной машины, который включает в себя датчик пути для определения пройденного этой машиной расстояния.
Шпалоподбивочная машина также снабжена устройством для маркировки шпал, которое включает в себя щуп для шпал, осуществляющий маркировку шпал, причем дополнительная шпалоподбивочная машина выполнена с детектором для автоматического обнаружения маркировки шпал, расстояние от верхней поверхности рамы дополнительной шпалоподбивочной машины до верхней поверхности рельса на соединяемом с машинной рамой концевом участке составляет максимум 3,5 метра, а на противоположном концевом участке - максимум 2 метра, при этом шпалоподбивочная машина снабжена подметающей щеткой, вращающейся от привода и расположенной на заднем в направлении рабочего движения машины концевом участке дополнительной шпалоподбивочной машины, а рама дополнительной шпалоподбивочной машины выполнена с коленчатым изгибом в верхнем направлении, а под изогнутым участком этой рамы размещены шпалоподбивочный агрегат для подбивки одной шпалы и рабочая кабина.
Известна компоновка машин для подбивки рельсового пути, содержащая шпалоподбивочную машину, состоящую из машинной рамы, опирающейся на ходовые тележки, двух шпалоподбивочных агрегатов для подбивки нескольких шпал, выполненных для одновременной подбивки нескольких шпал, расположенных рядом в продольном направлении машины и имеющих погружаемые попарно в балласт с помощью соответствующих приводов подачи на глубину шпалоподбойки, подъемно-рихтовочного агрегата, базовой системы для выполнения корректировки положения рельсового пути (патент US 4094250, кл. E 01 B 27/17, 1978 г.).
Для достижения упомянутого технического результата компоновка машин для подбивки рельсового пути, содержащая шпалоподбивочную машину, состоящую из машинной рамы, опирающейся на ходовые тележки, двух шпалоподбивочных агрегатов для подбивки нескольких шпал, выполненных для одновременной подбивки нескольких шпал, расположенных рядом в продольном направлении машины и имеющих погружаемые попарно в балласт с помощью соответствующих приводов подачи на глубину шпалоподбойки, подъемно-рихтовочного агрегата, базовой системы для выполнения корректировки положения рельсового пути, снабжена самостоятельно передвигающейся с помощью собственного ходового привода дополнительной шпалоподбивочной машиной со шпалоподбивочным агрегатом для подбивки одной шпалы, перемещающимся по вертикали с помощью привода, при этом шпалоподбивочная машина и дополнительная шпалоподбивочная машина соединены с помощью сцепления для совместного передвижения, две смежные расположенные в продольном направлении машины шпалоподбойки обоих шпалоподбивочных агрегатов для подбивки нескольких шпал удалены друг от друга на расстояние, соответствующее расстоянию между шпалами, а шпалоподбойки каждой пары направлены навстречу друг другу.
Известен способ подбивки рельсового пути, заключающийся в том, что во время первого рабочего этапа в направлении рабочего движения выполняют подбивку группы шпал, во время последующего рабочего этапа выполняют подбивку пропущенных при первом рабочем этапе шпал с помощью компоновки машин для подбивки рельсового пути, состоящей из шпалоподбивочной машины со шпалоподбивочным агрегатом для подбивки нескольких шпал и дополнительной шпалоподбивочной машины с одним шпалоподбивочным агрегатом для подбивки одной шпалы (патент US 5379700, кл. E 01 B 27/17, 10.01.95 г.)
Для достижения упомянутого технического результата в способе подбивки рельсового пути, заключающемся в том, что во время первого рабочего этапа в направлении рабочего движения выполняют подбивку группы шпал, во время последующего рабочего этапа выполняют подбивку пропущенных при первом рабочем этапе шпал с помощью компоновки машин для подбивки рельсового пути, состоящей из шпалоподбивочной машины со шпалоподбивочным агрегатом для подбивки нескольких шпал и дополнительной шпалоподбивочной машины с одним шпалоподбивочным агрегатом для подбивки одной шпалы, во время первого рабочего этапа выполняют подбивку не менее пяти расположенных друг за другом шпал, при этом при одновременной корректировке положения рельсового пути в плане и по вертикали выполняют одновременно подбивку группы шпал, расположенной непосредственно перед одной центральной шпалой, и группы шпал, расположенной сзади этой центральной шпалы, а во время последующего рабочего этапа выполняют подбивку пропущенной центральной шпалы из упомянутых пяти шпал, причем упомянутая шпалоподбивочная машина включает в себя второй шпалоподбивочный агрегат для подбивки нескольких шпал, подбивку групп шпал, расположенных перед центральной шпалой и сзади нее, выполняют при помощи упомянутых шпалоподбивочного агрегата для подбивки нескольких шпал и второго шпалоподбивочного агрегата для подбивки нескольких шпал, а подбивку центральной шпалы выполняют при помощи упомянутого шпалоподбивочного агрегата для подбивки одной шпалы.
Кроме этого, шпалоподбивочный агрегат для подбивки одной шпалы центрируют автоматически над подбиваемой шпалой в соответствии с пройденным машиной участком пути и опускают для выполнения подбивки, а подбивку центральной шпалы заканчивают автоматически после достижения соответствующего давления подбивки.
На фиг. 1 изображена компоновка машин для подбивки рельсового пути, вид сбоку. На фиг. 2 и 3 - то же, в увеличенном масштабе. На фиг. 4 - вариант выполнения рабочей рамы шпалоподбивочной машины. На фиг. 5 - вариант выполнения шпалоподбивочной машины и дополнительной шпалоподбивочной машины, вид сбоку. На фиг. 6 - вариант выполнения шпалоподбивочной машины и дополнительной шпалоподбивочной машины, которые соединены между собой при помощи привода продольного перемещения. На фиг. 7 - вариант выполнения соединения между машинами.
Показанная на фиг. 1 компоновка машин 1 для подбивки 22 рельсового пути 2 составлена из расположенной впереди в направлении рабочего движения (стрелка 3) шпалоподбивочной машины 4 и из следующей за ней дополнительной шпалоподбивочной машины 5. Обе шпалоподбивочные машины 4, 5 соединяются между собой разъемно с помощью сцепления 6.
Передвигающаяся на ходовых тележках 11 шпалоподбивочная машина 4, называемая также главной шпалоподбивочной машиной, имеет машинную раму 10, образованную из двух частей 8 и 9, соединенных между собой шарниром 7. На конце рамы 10 расположена ходовая кабина 12. Приводной блок 13, предназначенный для снабжения энергией различных приводов, находится на задней части 9 машинной рамы 10, выполненной в форме трейлера. Между обеими ходовыми тележками 11, на которые опирается выполненная в форме моста часть 8 машинной рамы 10, расположена рама 14, размещенная в продольном направлении машины 4. Эта рама 14 опирается своим задним концом с помощью ходовой тележки 15 непосредственно на рельсовый путь, в то время как передний ее конец 16 установлен с возможностью перемещения вдоль машины в своей опоре 17 машинной рамы 10. С помощью привода 66 подачи выполняется относительная подача в продольном направлении машины между рабочей рамой 14 и машинной рамой 10. На рабочей раме 14 закреплены два расположенных друг за другом в продольном направлении машины шпалоподбивочных агрегата 18, 19 для подбивки нескольких шпал, которые выполнены соответственно для одновременной подбивки двух смежных шпал 22 как шпалоподбивочные агрегаты для двух шпал.
Как можно, в частности, увидеть на фиг. 2, где машины выполнены в увеличенном масштабе, каждый шпалоподбивочный агрегат 18, 19 для подбивки нескольких шпал имеет на каждой стороне вдоль рельсов четыре шпалоподбивочных инструмента 21, расположенных друг за другом вдоль машины и оборудованных шпалоподбойками 20 для одновременной подбивки двух смежных шпал 22. Осуществляющие вибрационные движения с помощью вибрационного привода 23 шпалоподбивочные инструменты 21 погружаются в балласт, перемещаясь друг к другу с помощью собственного привода 24 подачи на глубину для выполнения операции подбивки. Две находящиеся в своей исходной позиции для выполнения операции подбивки и погружаемые друг к другу шпалоподбойкой 20 пары шпалоподбивочных инструментов 21 разнесены между собой на расстояние "а", равное расстоянию между шпалами. Обе расположенные рядом друг с другом в продольном направлении машины шпалоподбойки 20 обоих смежных шпалоподбивочных агрегатов 18, 19 для подбивки нескольких шпал разнесены между собой - относительно своей позиции, занимаемой непосредственно перед подбивкой - аналогично на расстояние, равное расстоянию "а" между шпалами. С помощью приводов 25 выполняется перемещение по вертикали обоих шпалоподбивочных агрегатов 18, 19.
Между обоими шпалоподбивочными агрегатами 18, 19 для подбивки нескольких шпал располагается подъемно-рихтовочный агрегат 27 для подъема и рихтовки рельсового пути, перемещаемый по вертикали и в поперечном направлении с помощью привода 26, или же соединяется с рабочей рамой 14. В этой зоне расположен, кроме того, еще копирный элемент 29 базовой системы 30, перемещающийся на копирных роликах 28 по рельсовому пути 2 и установленный с возможностью перемещения по вертикали. Этот копирный элемент 29 соединяется через чувствительный элемент датчика 31 с базовой линией 32 базовой системы 30, представляющей собой натянутый трос. Перед передним шпалоподбивочным агрегатом 19 для подбивки нескольких шпал в направлении рабочего движения расположен непосредственно перед ним второй подъемно-рихтовочный агрегат 27.
В рабочей кабине 33, соединенной с машинной рамой 10 и выступающей за пределы ходовой тележки 15 рабочей рамы 14, расположен центральный пульт управления 34 для управления обоими шпалоподбивочными агрегатами 18, 19 и обоими агрегатами 27. Для непрерывной рабочей подачи машиной рамы 10 предназначены ходовые приводы 35. Для маркировки шпалы 22, не подбитой обоими шпалоподбивочными агрегатами 18, 19 при первом этапе подбивки, который называется также как групповая подбивка благодаря одновременной подбивке четырех шпал 22, предназначено маркировочное устройство 36, например, распыляющее краску, вместе с щупом для шпал 37.
Как можно, в частности, увидеть на фиг. 3 имеет дополнительная шпалоподбивочная машина 5 машинную раму 39, опирающуюся на ходовые тележки. Эта рама выполнена с коленчатым изгибом в верхнем направлении между обеими ходовыми тележками 38 и ограничивается верхним контуром поверхности 40, имеющим наклон под углом относительно плоскости рельсового пути. Угловой наклон этого контура поверхности 40 выбирается таким образом, что расстояние контура поверхности от верхней кромки 41 рельса на конце 42 машинной рамы 39, предусмотренном для прицепления к шпалоподбивочной машине 4, составляет максимум 3,5 м и на противоположном конце составляет максимум 2 м.
Между обеими ходовыми тележками 38 дополнительной шпалоподбивочной машины 5 размещен один шпалоподбивочный агрегат 43 для подбивки одной шпалы и рабочая кабина 44 с пультом управления 45. Рабочая кабина 44 расположена аналогично как и шпалоподбивочный агрегат 43 для подбивки одной шпалы под участком 46 машинной рамы 39, выполненным с коленчатым изгибом в верхнем направлении и имеющим угловой наклон относительно плоскости рельсового пути. Перемещаемый с помощью привода 47 по вертикали шпалоподбивочный агрегат 43 оборудован погружаемыми в балласт шпалоподбойками 48 для подбивки отдельной шпалы 22, которые при этом перемещаются друг к другу. Дополнительная шпалоподбивочная машина 5 имеет детектор 49 для автоматического определения обозначенной цифрой 50 маркировки для шпалы. На заднем конце дополнительной шпалоподбивочной машины 5 в рабочем направлении расположена перемещающаяся по вертикали и вращающаяся с помощью привода 51 подметающая щетка 52 с поперечным ленточным конвейером 53. Для обеспечения энергией различных приводов, а также ходового привода 54 служит мотор 55.
Ниже более подробно поясняется функционирование описанной компоновки машин.
Компоновка 1 машин перемещается вместе с дополнительной шпалоподбивочной машиной 5, сцепленной со шпалоподбивочной машиной 4, к месту проведения работ. Как только она достигает места проведения работ, отцепляется дополнительная шпалоподбивочная машина 5 от шпалоподбивочной машины 4. С помощью передней в рабочем направлении движения шпалоподбивочной машины 4 происходит непрерывное движение вперед машинной рамы 10 в результате включения ходового привода 35, в то время как рабочая рама 14 вместе с шпалоподбивочными агрегатами 18, 19 перемещается поэтапно вперед от одного места подбивки к другому в результате периодического включения привода 66 подачи. Как только рабочая рама 14 останавливается на месте происходит одновременное опускание обоих шпалоподбивочных агрегатов 18, 19 при включении приводов 25 для одновременной подбивки двух пар шпал, между которыми находится центральная шпала 22, которая при групповой подбивке не подбивается. Непосредственно перед выполнением групповой подбивки происходит в результате включения обоих агрегатов 27, предназначенных для подъема и рихтовки рельсового пути в соединении с базовой системой 30 в данном случае необходимая корректировка положения рельсового пути. После одновременной подбивки в общем четырех шпал 22 опять поднимаются оба шпалоподбивочных агрегата 18, 19 и вместе с рабочей рамой 14 при включенном приводе 66 подачи перемещаются вперед на участок пути, соответствующий пятикратному расстоянию "а" между шпалами (см. по стрелке 56). Здесь при опускании обоих шпалоподбивочных агрегатов 18, 19 начинается опять описанный цикл одновременной подбивки в общем четырех шпал 22.
Вместе с опусканием обоих шпалоподбивочных агрегатов 18, 19 включается работающий преимущественно бесконтактно щуп для шпал 37, отсчитывающий шпалы. Как только не подбитая во время указанной выше подбивки центральная шпала 22 оказывается в районе маркировочного устройства 36, оно автоматически включается. Тем самым указанная не подбитая шпала 22 маркируется краской, в результате чего шпала получает маркировку 50. В этой связи предполагается возможной маркировка шпалы по любому известному типу, например, соответствующее намагничивание участка рельса в районе шпалы 22 или тому подобное. Маркировка 50 шпал может естественно выполняться также непосредственно между обоими шпалоподбивочными агрегатами 18, 19 для нескольких шпал.
Как только находящийся в рабочей кабине 44 обслуживающий персонал регистрирует маркировку 50 для шпалы останавливается дополнительная шпалоподбивочная машина 5 над шпалой 22, имеющей маркировку 50, при одновременном центрировании шпалоподбивочного агрегата 43 для подбивки одной шпалы. При включении приводов 47 обоих шпалоподбивочных агрегатов 43 для подбивки одной шпалы, расположенных соответственно на рельсах 57 рельсового пути 2, осуществляется называемая как остаточная подбивка шпалы 22, не подбитой при групповой подбивке передней шпалоподбивочной машиной 4. Остаточная подбивка заканчивается после достижения заранее выбранного на пульте управления 45 давления подбивки, которое регистрируется приводами 58 подачи на глубину шпалоподбоек 48. Поскольку во время остаточной подбивки рельсовый путь 2 не поднимается, то откорректированное во время групповой подбивки при одновременной подбивке четырех шпал 22 положение рельсового пути совершенно не меняется. Альтернативно может также автоматически прекращаться движение вперед машины, как только детектор 49 обнаружил маркировку 50 для шпалы.
В последующих примерах конструктивного выполнения обозначаются рабочие элементы для упрощения теми же ссылочными номерами, как и в примере конструктивного выполнения согласно фиг. 1-3.
Показанный на фиг. 4 вариант конструктивного выполнения отличается от описанного выше варианта тем, что рабочая рама 14 опирается на обоих продольных концах своей собственной ходовой тележкой 15 на рельсовый путь 2. Перемещение машинной рамы 10 относительно рабочей рамы 14 происходит в результате включения привода 66 подачи в соединении с ходовым приводом 59 ходовой тележки 15.
Как можно увидеть на фиг. 5, состоит шпалоподбивочная машина 4 из двух машинных рам 10, 39, соединенных между собой шарниром 60, при этом машинная рама 39, имеющая в рабочем направлении движения форму трейлера, и шпалоподбивочный агрегат 43 для подбивки одной шпалы образуют дополнительную шпалоподбивочную машину 5. Шпалоподбивочный агрегат 43 для подбивки одной шпалы перемещается в горизонтальном направлении по направляющим 61, проходящим в продольном направлении машины, и соединяется с приводом 62 для продольной подачи. Оба шпалоподбивочных агрегата 18, 19 для подбивки нескольких шпал, которые выполнены для одновременной подбивки двух шпал 22, располагаются непосредственно на машинной раме 10.
Эта шпалоподбивочная машина 4 или же компоновка машин 1 перемещается поэтапно от одного места подбивки к другому месту подбивки, при этом расстояние между следующими друг за другом местами подбивки соответствует пятикратному расстоянию "а" между шпалами. В то время как с помощью обоих шпалоподбивочных агрегатов 18, 19 для подбивки нескольких шпал при групповой подбивке осуществляется одновременная подбивка четырех шпал 22, выполняется параллельно с этим с помощью расположенного за ними шпалоподбивочного агрегата 43 для подбивки одной шпалы остаточная подбивка отдельной шпалы, не подбитой при групповой подбивке. Непосредственно перед подбивкой автоматически центрируется шпалоподбивочный агрегат 43 для подбивки одной шпалы над подбиваемой шпалой 22. Это достигается с помощью соединенного с пультом управления 34 датчика 63 пути, который начинает автоматически измерение пути одновременно с опусканием обоих шпалоподбивочных агрегатов 18, 19 для подбивки нескольких шпал.
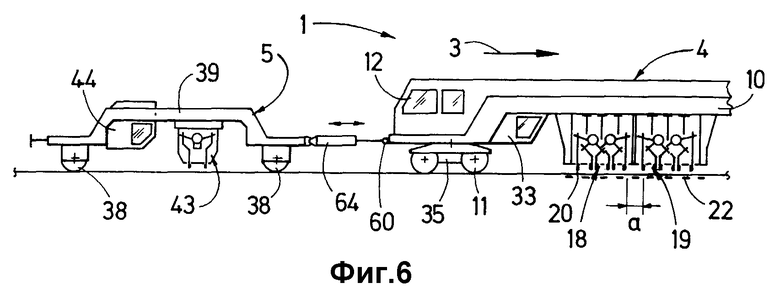
Показанная на фиг. 6 шпалоподбивочная машина 4 или же компоновка машин 1 имеет привод 64 подачи в качестве сцепления между обеими машинными рамами 10, 39. С помощью этого привода 64 подачи могут выполняться с одной стороны незначительные изменения расстояния между шпалоподбивочными агрегатами 18, 19 и шпалоподбивочными агрегатом 43 для подбивки одной шпалы с другой стороны, чтобы сделать возможной его центровку над подбиваемой отдельной шпалой. Каждый шпалоподбивочный агрегат 18, 19 для подбивки нескольких шпал оборудован для одновременной подбивки трех смежных шпал, расположенных непосредственно в продольном направлении машины, тремя парами шпалоподбоек 20. Вся компоновка машин 1 перемещается поэтапно, проходя участок пути, который соответствует семикратному расстоянию "а" между шпалами. Естественно также возможно комбинировать в качестве шпалоподбивочного агрегата 18, 19 для нескольких шпал междушпальный шпалоподбивочный агрегат с шпалоподбивочным агрегатом для трех шпал.
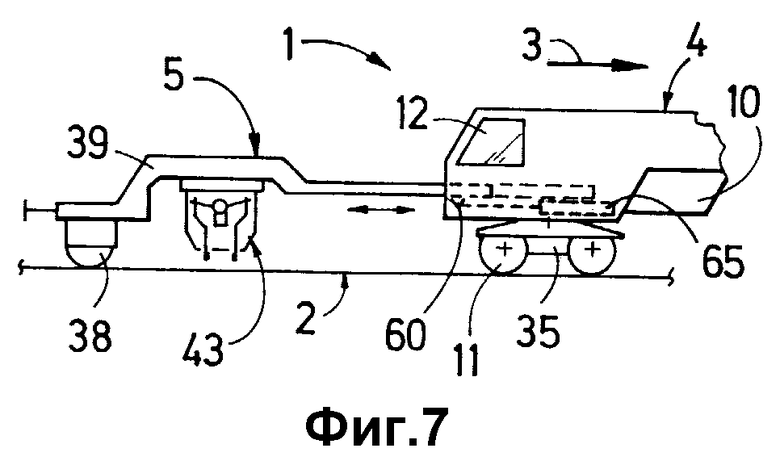
Наконец на фиг. 7 показан другой вариант выполнения шпалоподбивочной машины 4 или же компоновки машин 1, у которой дополнительная шпалоподобивочная машина 5 имеет машинную раму 39, выполненную в форме трейлера. Эта рама располагается с возможностью перемещения на заднем конце машинной рамы 10 шпалоподбивочной машины 4 с помощью привода 65 подачи.
Использование многолетнего опыта применения уже хорошо зарекомендовавших себя шпалоподбивочных агрегатов дает возможность добиться без их конструктивного изменения существенного повышения производительности в сочетании с точным расположением рельсового пути на длительное время. Специально установленное расстояние между обоими шпалоподбивочными агрегатами для подбивки шпал является идеальным решением, поскольку, с одной стороны, не появляется никаких конструктивных проблем или же взаимных помех в результате очень близкого взаимного расположения и, с другой стороны, не следует ожидать проблем с фиксированием положения рельсового пути, являющихся результатом увеличенного расстояния между ними. Поскольку затем поднятый рельсовый путь с помощью подъемно-рихтовочного агрегата в заданное положение подбивается одновременно в зоне не менее четырех шпал и тем самым фиксируется на длительное время, то несмотря на невыполненную подбивку центральной шпалы, расположенной между обоими шпалоподбивочными агрегатами для подбивки нескольких шпал, обеспечивается сохранение точного положения рельсового пути также после выполнения последующей подбивки отдельной шпалы. Дополнительная подбивочная машина может быть выполнена особенно просто в конструктивном отношении, так как необходимо наличие только одного шпалоподбивочного агрегата для подбивки одной шпалы без каких-либо дополнительных устройств.
Предложенная компоновка машин имеет то преимущество, что уже находящиеся в работе небольшие шпалоподбивочные машины могут применяться в качестве дополнительных шпалоподбивочных машин для осуществления остаточной подбивки. Кроме того, благодаря возможности независимого передвижения оптимально используется высокая производительность расположенной впереди шпалоподбивочной машины, несмотря на необходимость остаточной подбивки.
Двухступенчатый способ подбивки рельсового пути в соответствии с настоящим изобретением дает возможность добиться особенно высокой производительности подбивки, при этом остаточная подбивка ограничивается до минимума для предотвращения возможного влияния на откорректированное положение рельсового пути. При этом особое преимущество состоит в том, что благодаря центральному расположению не подбитой шпалы в группе подбитых шпал (между, по меньшей мере, двумя парами подбитых шпал) обеспечивается наилучшее сохранение откорректированного положения рельсового пути, полученного уже при первом этапе подбивки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДБИВКИ БОЛЬШОГО КОЛИЧЕСТВА ШПАЛ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2114948C1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ ПУТЕВОЙ МАШИНЫ | 1991 |
|
RU2015239C1 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ВЫПОЛНЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ РАБОТ | 1996 |
|
RU2109101C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ СТРЕЛОК И ПЕРЕСЕЧЕНИЙ ПУТИ | 1993 |
|
RU2062858C1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ | 1996 |
|
RU2110635C1 |
| ПЕРЕДВИЖНАЯ ШПАЛОПОДБИВОЧНАЯ И ВЫПРАВОЧНАЯ МАШИНА | 1988 |
|
RU2013483C1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ | 1998 |
|
RU2158796C2 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ ШПАЛОПОДБИВОЧНОЙ МАШИНЫ | 1995 |
|
RU2100513C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2082847C1 |
| ПЕРЕДВИЖНАЯ ШПАЛОПОДБИВОЧНАЯ МАШИНА | 1991 |
|
RU2048629C1 |




Шпалоподбивочная машина для одновременной подбивки большого количества шпал рельсового пути состоит из машинной рамы, опирающейся на ходовые тележки, двух шпалоподбивочных агрегатов для подбивки нескольких шпал, выполненных для одновременной подбивки не менее двух шпал и расположенных друг за другом в продольном направлении машины, подъемно-рихтовочного агрегата и базовой системы для выполнения корректировки положения рельсового пути. Обе смежные в продольном направлении машины шпалоподбойки обоих шпалоподбивочных агрегатов удалены друг от друга на расстояние, соответствующее расстоянию (а) между шпалами. Компоновка машин для подбивки рельсового пути содержит шпалоподбивочную машину со шпалоподбивочными агрегатами для одновременной подбивки нескольких шпал и дополнительную шпалоподбивочную машину со шпалоподбивочным агрегатом для подбивки одной шпалы. Дополнительная машина самостоятельно передвигается с помощью собственного ходового привода. При подбивке рельсового пути во время первого рабочего этапа выполняют подбивку не менее пяти расположенных друг за другом шпал, при одновременной корректировке положения рельсового пути в плане и по вертикали выполняют одновременно подбивку группы шпал, расположенной перед одной центральной шпалой, и группы шпал, расположенной сзади этой центральной шпалы. Во время последующего рабочего этапа выполняют подбивку пропущенной этой центральной шпалы. Обеспечивается установка рельсового пути в точное положение на длительное время при высокой производительности подбивки рельсового пути. 3 с. и 19 з. п. ф-лы, 7 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4094250 А, 13.06.78 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 5379700 А, 10.01.95 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 3744428 А, 10.07.73 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 4224874 А, 30.09.80 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 3595170 А, 27.07.71 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Выправочно-подбивочная машина | 1971 |
|
SU503541A3 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Шпалоподбивочная машина | 1976 |
|
SU745371A3 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| GB 1120840 А, 24.07.68 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| GB 1533052 А, 22.11.78 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ вспучивания гидрослюды и устройство для его реализации | 2019 |
|
RU2702230C1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| СУДОВОЕ УСТРОЙСТВО ДЛЯ ПОСТАНОВКИ И ВЫБОРКИ АНТЕННОГО КАБЕЛЯ | 2005 |
|
RU2314967C2 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| DE 4400807 А1, 28.07.94 | |||
| Насос | 1917 |
|
SU13A1 |
| Накатной ролик | 1990 |
|
SU1816670A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Устройство для проведения гальванических процессов | 1988 |
|
SU1534102A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ извлечения меди из растворов | 1988 |
|
SU1534080A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| DE 3838109 А1, 31.08.89. | |||

