Изобретение относится к системам управления ракет и может быть использовано в аппаратуре управления ракеты, вращающейся вокруг своей продольной оси.
Известен контур регулирования системы управления для дистанционно управляемого летательного аппарата, вращающегося вокруг своей продольной оси (патент Великобритании N 1053713), в котором с помощью отделенного от летательного аппарата и входящего в пункт управления пеленгатора определяются сигналы отклонения летательного аппарата от базовой прямой в прямоугольной системе координат, затем преобразовываются в координаты полярной системы координат и далее с помощью размещенного в пункте управления блока электронных схем в команды наведения, которые затем передаются на летательный аппарат, например, через проводную связь, соединяющую его с пунктом управления. При этом команды воздействуют на летательный аппарат таким образом, чтобы траектория его полета совпадала с базовой прямой.
В данном контуре регулирования системы управления угол поворота летательного аппарата вокруг его продольной оси с помощью выработанных в летательном аппарате опорных импульсов передается в пункт управления и там обрабатывается вместе с сигналами рассогласования, определенными пеленгатором, в блоке электронных схем таким образом, что в зависимости от определенного угла поворота выдается команда наведения, правильно отнесенная к этому углу. При этом опорные импульсы, выработанные в летательном аппарате, передаются по той же самой линии передачи, связывающей летательный аппарат с пунктом управления, вследствие чего эта линия передачи не может быть использована для передачи команд наведения от пункта управления к летательному аппарату в момент передачи опорных сигналов. Следовательно, при определенных углах поворота летательного аппарата, определяемых моментами передачи опорных импульсов, управление им с помощью команд наведения не осуществляется. Блок электрических схем, необходимый для расчета команд наведения, помимо прочего, достаточно сложен, так как для таких расчетов необходимо непрерывно восстанавливать положение летательного аппарата по углу вращения, при этом в качестве исходной информации в распоряжении имеется лишь один опорный импульс за один оборот.
Известен контур регулирования системы управления для дистанционно управляемого летательного аппарата, вращающегося вокруг своей продольной оси (заявка ФРГ N 1802223), лишенный вышеуказанных недостатков. Он включает размещенный в пункте управления блок формирования команд наведения летательного аппарата, размещенный также на летательном аппарате преобразователь команд наведения в одноканальный сигнал управления, выполненный в виде потенциометрического датчика вращения летательного аппарата, токосъемник которого соединен с гироскопом, для выработки пилообразного напряжения, пропорционального углу поворота летательного аппарата, суммирующих усилителей, переключателя и двух компараторов, и устройство приведения в действие газового руля.
Недостатками данного устройства являются необходимость преобразования сигналов отклонения летательного аппарата от базовой прямой, определенных в прямоугольной системе координат, в сигналы в полярной системе координат, а также наличие разрыва между положительным и отрицательным контактами потенциометра датчика вращения, при прохождении через который подвижного токосъемника возникают искажения формируемого пилообразного напряжения и, следовательно, одноканального сигнала, поступающего в устройство приведения в действие газового руля.
Для устранения указанных недостатков предлагается бортовая система управления вращающейся ракеты, содержащая потенциометрический датчик вращения ракеты, токосъемник которого закреплен на неподвижной рамке гироскопа, два компаратора и усилитель мощности, соединенный с приводом органа управления ракеты, отличающаяся тем, что в нее введены блок приема и формирования команд наведения, выполненный в виде последовательно соединенных приемной рупорной антенны, СВЧ-фильтра, детекторной секции, усилителя и дешифратора сигналов, двух триггеров, последовательно соединенных с LC-фильтрами, и логическая схема "исключающее ИЛИ", а потенциометрический датчик вращения ракеты имеет равномерную кольцевую обмотку с диаметрально противоположными отводами, соединенными с источником питания, и два перпендикулярно расположенных токосъемника, при этом первые входы триггеров соединены с первым и вторым выходами дешифратора соответственно, а вторые входы с третьим выходом дешифратора, выходы LC-фильтров соединены с первыми входами компараторов, вторые входы которых соединены с токосъемниками потенциометрического датчика вращения ракеты, а выходы с входами логической схемы "исключающее ИЛИ", выход которой соединен с входом усилителя мощности.
На фиг. 1 представлена структурная схема заявляемого устройства, где использованы следующие обозначения: Uz, Uy команды наведения ракеты по осям Z и Y соответственно;  ,
,  сигналы пилообразной формы с датчика вращения;
сигналы пилообразной формы с датчика вращения; ,
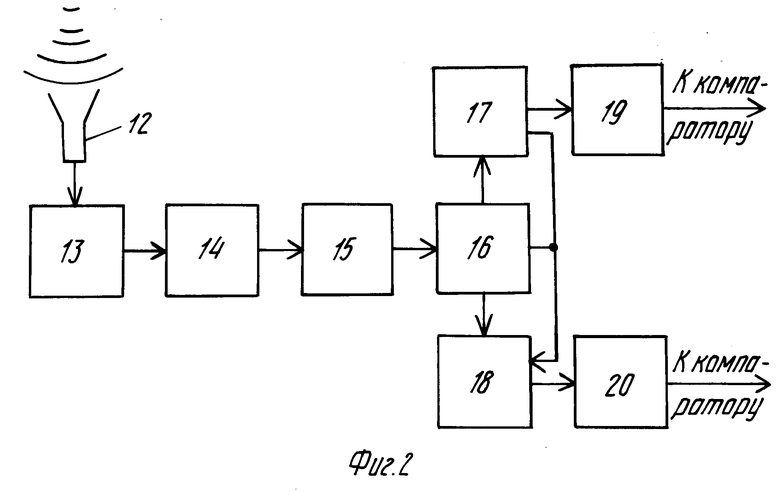
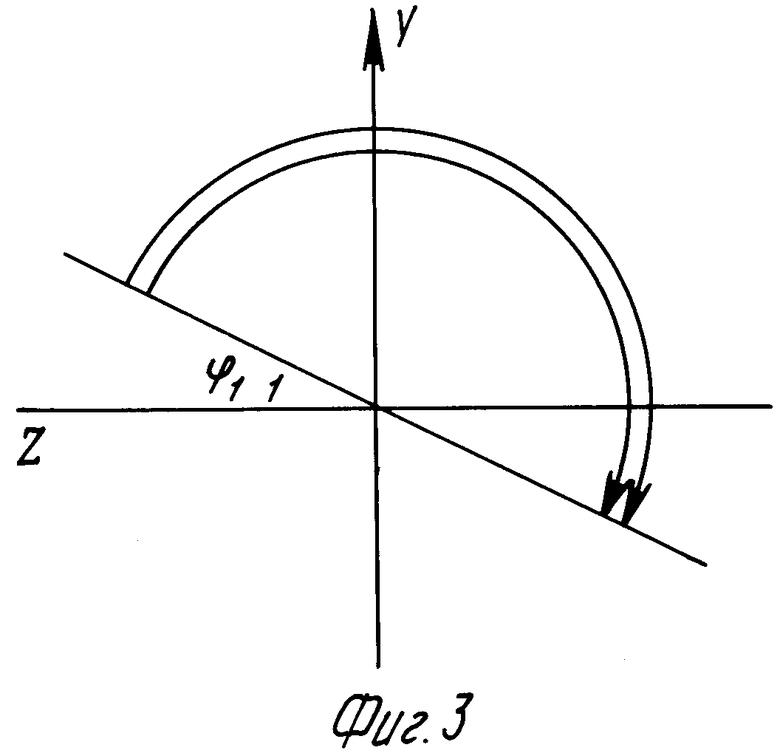
,  выходные сигналы компараторов; Uупр одноканальный сигнал управления рулевым органом ракеты; на фиг.2 структурная схема блока приема и формирования команд наведения в двух взаимно ортогональных направлениях; на фиг. 3 годограф вектора управляющей силы R в том случае, когда ее осредненное за период вращения ракеты значение
выходные сигналы компараторов; Uупр одноканальный сигнал управления рулевым органом ракеты; на фиг.2 структурная схема блока приема и формирования команд наведения в двух взаимно ортогональных направлениях; на фиг. 3 годограф вектора управляющей силы R в том случае, когда ее осредненное за период вращения ракеты значение  имеет максимальное значение
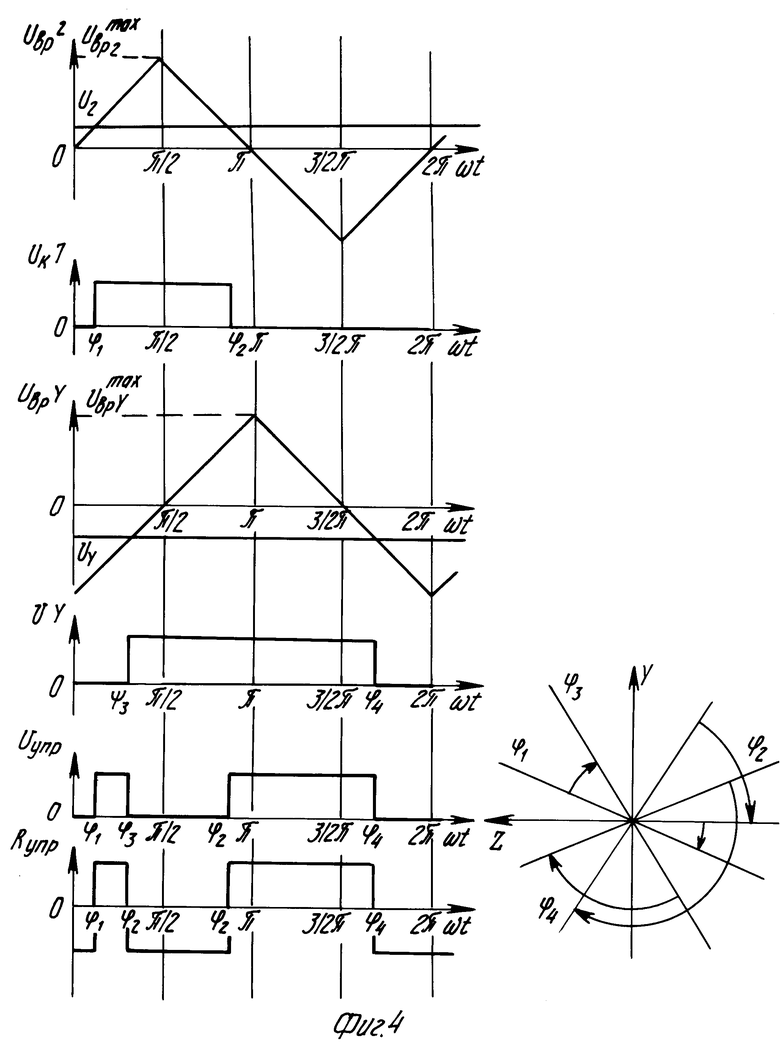
имеет максимальное значение  на фиг. 4 эпюры сигналов и годограф вектора управляющей силы, формируемой рулевым органом ракеты, где использованы следующие обозначения:
на фиг. 4 эпюры сигналов и годограф вектора управляющей силы, формируемой рулевым органом ракеты, где использованы следующие обозначения:  ,
,  амплитудные значения сигналов пилообразной формы с датчика вращения; ω частота вращения ракеты; t время;
амплитудные значения сигналов пилообразной формы с датчика вращения; ω частота вращения ракеты; t время;
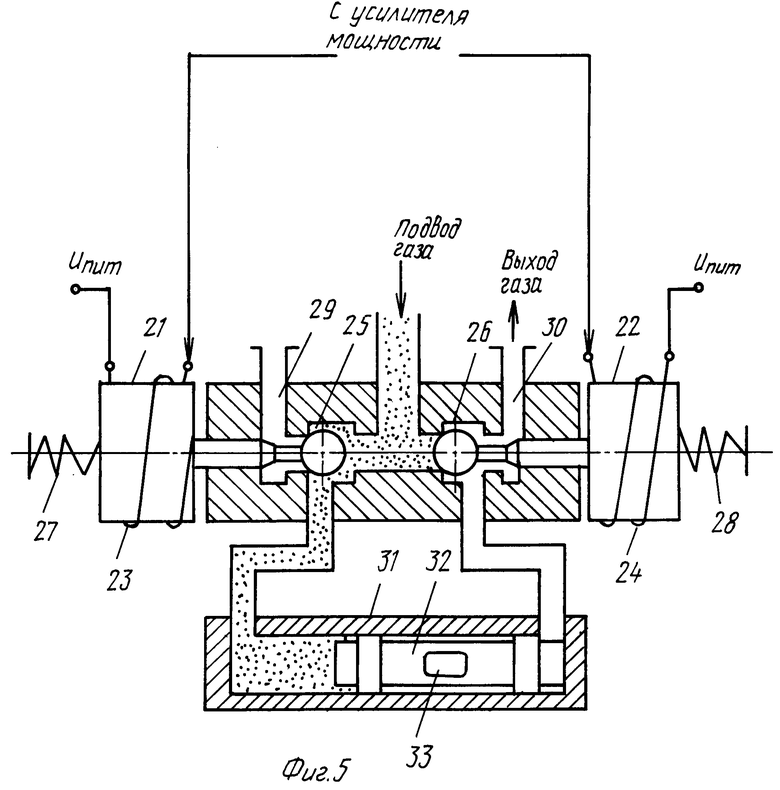
На фиг. 5 принцип работы привода органа управления ракеты на примере газовой релейной рулевой машинки.
Система (фиг. 1) содержит блок приема и формирования команд наведения 1, компараторы 2, 3, логическую схему "исключающее ИЛИ" 4. усилитель мощности 5, соединенный с приводом органа управления ракеты 6, потенциометрический датчик вращения ракеты 7, имеющий равномерную кольцевую обмотку с диаметрально противоположными отводами 8, соединенными с источниками питания, и двумя перпендикулярно расположенными токосъемниками 9, закрепленными на неподвижной рамке 10 гироскопа, при этом выходы блока приема и формирования команд наведения 1 соединены с первыми входами компараторов 2, 3, вторые входы которых соединены с токосъемниками 9 потенциометрического датчика вращения ракеты 7, а выходы с входами логической схемы "исключающее ИЛИ" 4, выход которой соединен с входом усилителя мощности 5.
При этом блок приема и формирования команд наведения 1 (фиг.2) содержит последовательно соединенные рупорную антенну 12, СВЧ-фильтр 13, детекторную секцию 14, усилитель 15 и дешифратор 16, триггеры 17, 18 и LC-фильтры 19, 20, при этом первый и второй выходы дешифратора 16 соединены с первыми входами триггеров 17 и 18 соответственно, а его третий выход с вторыми входами триггеров 17, 18, выходы которых соединены с LC-фильтрами 19, 20.
Привод органа управления ракеты 6 (фиг.5) содержит электромагниты с якорями 21, 22 и обмотками 23, 24, шарики 25, 26 левого и правого клапанов, пружины 27, 28, левую и правую полости выхлопа 29, 30, силовой цилиндр 31 и поршень 32 с пазом 33.
Принцип работы заявляемой бортовой системы управления вращающейся ракеты основан на использовании для формирования одноканального сигнала управления вращающейся вокруг своей продольной оси ракетой двух пилообразных сигналов, пропорциональных углу поворота ракеты вокруг своей оси, сдвинутых относительно друг друга на  . Частота следования этих сигналов равна частоте вращения ракеты ω.
. Частота следования этих сигналов равна частоте вращения ракеты ω.
Команды наведения ракеты UZ, UY, сформированные в прямоугольной системе координат со взаимно ортогональными осями Z и Y в блоке приема и формирования команд наведения 1, с целью воздействия на ракету таким образом, чтобы траектория ее полета совпадала с базовой прямой (направлением на цель), сравниваются на компараторах 2, 3 с пилообразными сигналами, пропорциональными углу поворота ракеты вокруг своей продольной оси, сдвинутыми относительно друг друга на p/2 поступающими с токосъемников 9 потенциометрического датчика вращения ракеты 7. С выходов компараторов 2, 3 сигналы прямоугольной формы  и
и  поступают на вход логической схемы "исключающее ИЛИ" 4, формирующей одноканальный сигнал управления Uупр., поступающий на усилитель мощности 5 и далее на привод органа управления ракеты 6.
поступают на вход логической схемы "исключающее ИЛИ" 4, формирующей одноканальный сигнал управления Uупр., поступающий на усилитель мощности 5 и далее на привод органа управления ракеты 6.
Для пояснения преобразования команд наведения в одноканальный сигнал управления воспользуемся понятием коэффициента команд, под которым понимается отношение формируемой органом управления (ОУ) ракеты управляющей силы R, осредненной за период вращения ракеты вокруг своей продольной оси ( ), к ее максимально возможному значению (
), к ее максимально возможному значению (  ).
).

Величина  достигает максимального значения при перекладывании ОУ из одного крайнего положения в другое с двукратной частотой вращения ракеты (при перекладывании ОУ из одного крайнего положения в другое направление управляющей силы меняется на противоположное). Применив для нахождения
достигает максимального значения при перекладывании ОУ из одного крайнего положения в другое с двукратной частотой вращения ракеты (при перекладывании ОУ из одного крайнего положения в другое направление управляющей силы меняется на противоположное). Применив для нахождения  теорему о среднем и приняв во внимание, что мгновенное значение проекции управляющей силы на любое направление определяется формулой
теорему о среднем и приняв во внимание, что мгновенное значение проекции управляющей силы на любое направление определяется формулой
R = Rупр•cos(Φ - Φ1),
получим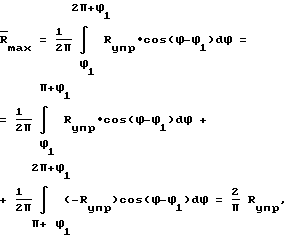
где Rупр воздействующая на ракету управляющая сила, развиваемая ее ОУ;
R мгновенное значение проекции управляющей силы на то или иное направление;
Φ угол между осью OZ и вектором управляющей силы;
v1 угол между осью OZ и выбранным направлением.
Значение  меньше максимального в случае, когда ОУ за период вращения ракеты перекладывается больше двух раз. Эпюры напряжений, поясняющие механизм формирования одноканального сигнала управления ОУ, и годограф вектора управляющей силы приведены на фиг. 4.
меньше максимального в случае, когда ОУ за период вращения ракеты перекладывается больше двух раз. Эпюры напряжений, поясняющие механизм формирования одноканального сигнала управления ОУ, и годограф вектора управляющей силы приведены на фиг. 4.
Мгновенные значения сигналов, пропорциональных углу поворота ракеты вокруг своей продольной оси, определяются из формул: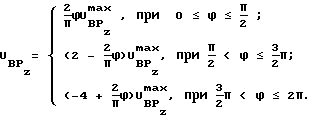
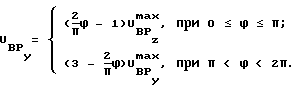
Используя эти соотношения, найдем значения углов Φi (i=1,4), при которых перекладывается ОУ (когда  UZ и
UZ и  UY):
UY):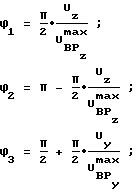
Величины осредненных за период вращения ракеты управляющих сил  сформированных в направлениях осей Z и Y соответственно, равны:
сформированных в направлениях осей Z и Y соответственно, равны:
Подставив в эти выражения полученные ранее значения углов Φi/ запишем
При этом коэффициенты команд равны
Таким образом, управляющие воздействия на ракету при использовании заявляемой системы пропорциональны величинам команд наведения.
Формирование команд наведения ракеты осуществляется путем преобразования в соответствии с выбранным законом управления сигналов ее угловых отклонений относительно базовой прямой, вырабатываемых находящимся в пункте управления пеленгатором, в командные сигналы наведения.
При наличии проводной линии связи между ракетой и пунктом управления сформированные команды наведения могут передаваться на входы находящихся на борту ракеты компараторов по проводам.
В случае беспроводной линии связи, например, при передаче команд на борт ракеты с помощью радиолинии связи, сформированные команды наведения подвергаются время-импульсной модуляции. При этом они преобразуются в командные импульсы, временное положение которых относительно тактовых импульсов определяется величиной и полярностью команд наведения (тактовые импульсы формируются в радиолинии связи для обеспечения время-импульсной модуляции команд наведения). Для различения команд наведения во взаимно ортогональных направлениях может быть применено временное кодирование. Оно заключается в преобразовании команд управления и тактовых импульсов в кодовые группы, состоящие, например, из трех импульсов. Кодовые группы тактовых и командных импульсов отличаются друг от друга различным расположением импульсов в тройках. Эти кодовые группы поступают в передатчик радиолинии связи, где преобразуются в мощные радиоимпульсы сверхвысокой частоты (СВЧ), которые с помощью антенны излучаются в направлении базовой прямой.
На борту ракеты устанавливается блок приема и формирования команд наведения 1 (фиг.2), включающий в себя, например, последовательно соединенные рупорную антенну 12, СВЧ-фильтр 13, детекторную секцию, усилитель 15, выполненный на линиях задержки дешифратор 16, предназначенный для декодирования кодовых групп импульсов, и два триггера 17, 18, выходы которых подключены к LC-фильтрам 19, 20. Принимаемые рупорной антенной 12 СВЧ-импульсы радиолинии связи фильтруются СВЧ-фильтром 13, детектируются детекторной секцией и усиливаются усилителем 15. В дешифраторе 16 каждая из принятых троек тактовых и командных импульсов сводится на линиях задержки в один импульс. (Времена задержки линий соответствуют временам задержки второго и третьего импульсов каждой тройки относительно ее первого импульса. Выходы линий задержки, предназначенных для декодирования тактовых и командных групп импульсов, подключены к первому и второму входам логических схем "И". Третий вход этих трех логических схем "И" подключен к входу дешифратора. Таким образом, при поступлении на вход дешифратора третьего импульса каждой кодовой группы на выходе соответствующей схемы "И" формируется один импульс). Эти импульсы поступают далее на установочные входы триггеров 17, 18. При этом тактовыми импульсами триггеры "взводятся", а командными (каждый триггер своим командным импульсом) "опрокидываются". Формирующиеся на выходе триггеров 17, 18 меандры, проходя через LC-фильтры 19, 20, трансформируются в команды наведения, величина и полярность которых определяется временным положением командных импульсов относительно тактовых.
Потенциометрический датчик вращения ракеты 7 может быть выполнен, например, в виде потенциометра с непрерывной, равномерной кольцевой обмоткой, жестко связанного с корпусом ракеты, с двумя перпендикулярно расположенными токосъемниками 9, связанными с внешней неподвижной рамкой гироскопа ракеты и, следовательно, неподвижными в пространстве. Потенциометр имеет два диаметрально противоположных отвода 8, соединенных с источниками питания. Такая реализация потенциометрического датчика вращения позволяет формировать два пилообразных сигнала, сдвинутых относительно друг друга на π/2 представленные на фиг.4
В качестве компараторов могут быть использованы, например, функциональные микросхемы 521САЗ.
В качестве схемы "исключающее ИЛИ" может быть использована, например, функциональная логическая микросхема 564ЛП2.
В качестве усилителя мощности может быть использован, например, релейный транзисторный усилитель с двумя оконечными каскадами, работающими в противофазе.
Привод органа управления ракетой может быть выполнен, например, в виде релейной рулевой машинки, управляющей перемещением аэродинамического или газового рулевого органа. Принцип ее работы пояснен на фиг. 5.
Выходы усилителей мощности 5 подключены к обмоткам 23, 24 левого и правого электромагнитов рулевой машинки, вторые концы которых подключены к источнику питания Uпит. При прохождении тока через правый электромагнит якорь 22 этого электромагнита перемещает шарик 26 правого клапана, перекрывая проход газа в правую полость силового цилиндра 33 и открывая полость выхлопа 30. В это время под действием давления газа шарик 25 левого клапана, преодолевая усилие пружины 27, перекрывает проход газа в полость выхлопа 29 и открывает проход в левую полость силового цилиндра 31 под поршень 32, вследствие чего поршень 32 перемещается в крайнее правое положение.
При прохождении тока через левый электромагнит якорь 21 этого электромагнита перемещает шарик 25 левого клапана, перекрывая проход газа в левую полость силового цилиндра 31 и открывая полость выхлопа 29. В это время под действием давления газа шарик 26 правого клапана, преодолевая усилие пружины 28, перекрывает проход газа в полость выхлопа 30 и открывает проход в правую полость силового цилиндра 31 под поршень 32, вследствие чего поршень 32 перемещается в крайнее левое положение.
При работе рулевой машинки поршень 32 занимает одно из двух крайних устойчивых положений.
Поступательное перемещение поршня 32 через поводок, конец которого вставлен в паз 33 поршня 32, преобразуется в угловое перемещение рулевого органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОДНОКАНАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ (ВАРИАНТЫ) | 1995 |
|
RU2111522C1 |
| КОРАБЕЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2165063C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА | 2004 |
|
RU2280226C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
Изобретение относится к системам управления ракет и может быть использовано в управляемых противотанковых ракетах, вращающихся вокруг своей продольной оси. Технический результат заключается в уменьшении искажения управляющего сигнала, который достигается за счет того, что бортовая система управления содержит потенциометрический датчик вращения ракеты, имеющий равномерную кольцевую обмотку с диаметрально противоположными отводами, соединенными с источником питания, и два перпендикулярно расположенных токосъемника, закрепленных на неподвижной рамке гироскопа, блок приема и формирования команд наведения, выполненный в виде последовательно соединенных приемной рупорной антенны, СВЧ-фильтра, детекторной секции, усилителя и дешифратора сигналов, и двух триггеров, последовательно соединенных с LC-фильтрами, два компаратора, логическую схему "исключающее ИЛИ" и усилитель мощности, соединенный с приводом органа управления ракеты. При этом первые входы триггеров соединены с первым и вторым выходами дешифратора соответственно, а вторые входы - с третьим выходом дешифратора. Выходы LC-фильтров соединены с первыми входами компараторов, вторые входы которых соединены с токосъемниками потенциометрического датчика вращения ракеты, а выходы - с входами логической схемы "исключающее ИЛИ", выход которой соединен с входом усилителя мощности. 5 ил.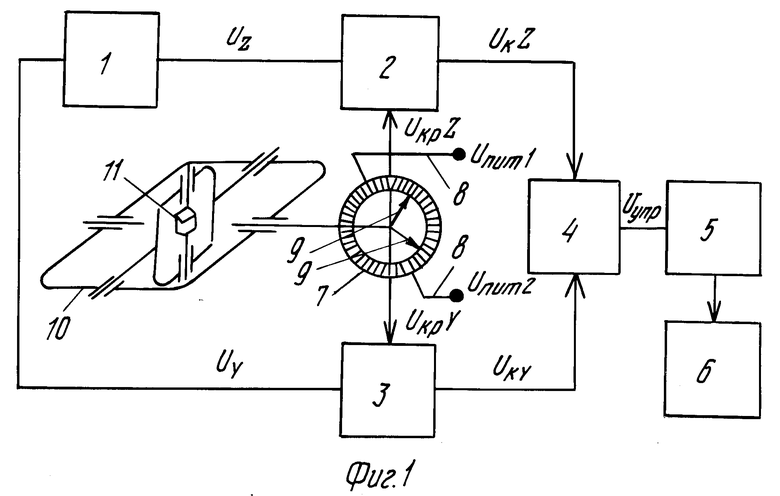
Бортовая система управления вращающейся ракеты, содержащая потенциометрический датчик вращения ракеты, токосъемник которого закреплен на неподвижной рамке гироскопа, два компаратора и усилитель мощности, соединенный с приводом органа управления ракеты, отличающаяся тем, что в нее введены блок приема и формирования команд наведения, выполненный в виде последовательно соединенных приемной рупорной антенны, СВЧ-фильтра, детекторной секции, усилителя и дешифратора сигналов, и двух триггеров, последовательно соединенных с LC-фильтрами, и логическая схема ИСКЛЮЧАЮЩЕЕ ИЛИ, а потенциометрический датчик вращения ракеты имеет равномерную кольцевую обмотку с диаметрально противоположными отводами, соединенными с источником питания, и два перпендикулярно расположенных токосъемника, при этом первые входы триггеров соединены с первым и вторым выходами дешифратора соответственно, а вторые входы с третьим выходом дешифратора, выходы LC-фильтров соединены с первыми входами компараторов, вторые входы которых соединены с токосъемниками потенциометрического датчика вращения ракеты, а выходы с входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которой соединен с входом усилителя мощности.
| DE, заявка, 1802223, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

