Изобретение относится к системам наведения ракет и может быть использовано для наведения ракет, запускаемых с морских носителей, например, с катеров.
Известна система наведения ракеты по патенту N 3868883 СИИ, МПК F 42 B 15/04, содержащая прицельное устройство, пусковую установку, устройства слежения и управления ракетой. При использовании этой системы для наведения ракет, запускаемых с морских носителей комплексов управляемого ракетного вооружения, вывод ракет на линию прицеливания затягивается. Это объясняется тем, что из-за стартовых возмущений, вызванных качкой носителя, возрастают угловые отклонения ракеты, попадающей в поле зрения устройства слежения, относительно его оптической оси, что приводит к увеличению времени и дальности вывода ракеты на линию прицеливания под действием команд управления, формируемых устройством управления ракетой.
Известна система автоматического наведения ракеты по патенту N 2148656, МПК F 41 G 7/00, Франция. Данная система, выбранная за прототип, содержит оптический прицел, блок наведения, формирующий команды наведения в зависимости от отклонения ракеты относительно линии прицеливания, пусковую установку, устройство передачи команд наведения на ракету и ракету с источником импульсно излучаемой энергии в направлении, противоположном направлению ее полета.
Для обеспечения принципиальной возможности наведения ракеты с помощью данной системы ракета после старта обязательно должна попасть в поле зрения блока наведения, оптическая ось которого, как и оптическая ось прицела, направлена на цель. Поэтому пусковая установка, с которой стартует ракета, должна быть определенным образом ориентирована в направлении линии прицеливания (оптической оси прицела, через который оператор наблюдает за целью). Диапазон допустимых отклонений оси пусковой установки от направления линии прицеливания не широк и определяется ограниченным полем зрения телескопа блока наведения и параметрами взаимного расположения пусковой установки и прицела.
Наведение ракеты по командам, формируемым блоком наведения, начинается не с момента старта ракеты, а с некоторой задержкой. Это объясняется тем, что после старта ракеты проходит определенное время до ее "встреливания" (появления) в поле зрения блока наведения, имеющего конечные размеры.
Это время может быть больше или меньше в зависимости от того разнесены или совмещены друг с другом блок наведения и пусковая установка.
В морских условиях из-за стартовых возмущений, вызванных качкой носителя, указанное время дополнительно возрастает.
Существует и другая причина задержки формирования команд наведения. Она имеет следующее объяснение.
Для наведения ракеты необходимо располагать истинной информацией об ее отклонении относительно линии прицеливания. Получение такой информации обеспечивается следящей системой - координатором (пеленгатором) блока наведения. Однако на начальном участке траектории полета ракеты из-за быстро меняющегося входного сигнала (размера регистрируемого координатором пятна бортового источника излучения ракеты) ошибки определения координат ракеты очень велики, поскольку в следящей системе имеют место переходные процессы. Такую информацию о координатах ракеты нельзя использовать для формирования команд наведения.
Учитывая вышеизложенное, ясно, что для исключения формирования ошибочных команд наведения ракеты (а иногда и ложных по полярности) на начальном участке траектории ее полета - до завершения переходных процессов в следящей системе - формирование команд наведения по сигналам координатора блока наведения и передача их на борт ракеты производиться не должны.
Временной интервал между стартом ракеты и началом управления ее полетом по командам, формируемым блоком наведения, определяется конкретными параметрами и характеристиками следящей системы и ракеты, а также взаимным расположением (компоновкой) блока наведения и пусковой установки, с которой стартует ракета. До момента начала управления ракета летит по баллистической траектории.
На начальном, баллистическом, участке полета характер траектории ракеты относительно линии прицеливания определяется в основном начальными возмущениями, обусловленными взаимодействием пусковой установки и ракеты при старте, влиянием составляющей набегающего воздушного потока, перпендикулярной направлению старта ракеты, динамикой движения носителя при старте ракеты. Наименьшее рассеивание ракет относительно линии прицеливания на начальном неуправляемом участке траектории полета при прочих равных условиях обеспечивается при их старте в направлении хода носителя. Дело в том, что при наличии углового рассогласования между направлением движения носителя (в частности, продольной осью корабля) и направлением линии прицеливания стартующая ракета всегда будет испытывать боковой скоростной напор воздушного потока, под действием которого она разворачивается на поток вследствие ее аэродинамической устойчивости. Данное обстоятельство приводит к увеличению начального рассеивания ракет. Наименьшее же начальное рассеивание ракет важно как с точки зрения принципиального обеспечения попадания ракеты в поле зрения блока наведения, так и с точки зрения быстрейшего вывода ракеты на оптическую ось блока наведения (линию прицеливания), что ведет к уменьшению минимально допустимой дальности стрельбы.
Минимальная дальность стрельбы, то есть минимальная дальность, на которой с требуемой вероятностью обеспечивается попадание ракеты в визируемую оператором цель, является одной из основных тактико-технических характеристик комплекса управляемого ракетного вооружения. Минимальная дальность стрельбы зависит от точности "встреливания" ракеты в поле зрения блока наведения. То есть, чем ближе к оптической оси телескопа блока наведения (линии прицеливания) находится ракета в момент начала управления, тем короче дальность ее вывода на линию прицеливания, и, следовательно, короче минимальная дальность стрельбы.
Следует отметить еще один фактор, влияющий на точность "встреливания" ракеты в поле зрения блока наведения, а именно тип пусковой установки: подвижная она или неподвижная. Если пусковая установка комплекса управляемого ракетного вооружения подвижна, то есть постоянно с достаточной точностью ориентирована в направлении линии прицеливания с упреждением на скорость перемещения линии прицеливания, то точность "встреливания" значительно выше, чем при использовании неподвижной пусковой установки, для которой указанная точность зависит от углового рассогласования между линией прицеливания и осью пусковой установки в момент запуска ракеты.
Чем больше данное угловое рассогласование, тем на большем расстоянии от линии прицеливания окажется ракета в момент начала управления по командам, формируемым блоком наведения, и тем больше, следовательно, минимальная дальность стрельбы. При больших угловых рассогласованиях ракета может просто не попасть в поле зрения блока наведения.
В морских условиях, при наличии качки корабля-носителя комплекса управляемого ракетного вооружения, особенно килевой, бортовой и рысканья, точность "встреливания" ракеты в поле зрения блока наведения значительно снижается. Иными словами, в момент начала управления ракета может находиться на значительных расстояниях от линии прицеливания, что приводит к увеличению минимальной дальности стрельбы, или даже к потере ракеты из-за срыва наведения.
В связи с этим в условиях волнения моря при наличии достаточно узкого диапазона допустимых (исходя из условий "встреливания" ракеты в поле зрения блока наведения и обеспечения заданной минимальной дальности стрельбы) для запуска ракеты угловых рассогласований между линией прицеливания и осью неподвижной пусковой установки возникает проблема с осуществлением самого запуска ракеты. Это объясняется объективными трудностями совмещения продольной оси корабля, с которой жестко сопряжена ось неподвижной пусковой установки, с направлением на цель с требуемой точностью при волнении.
Целью предложения является сокращение минимальной дальности стрельбы корабельного комплекса управляемого ракетного вооружения, а также расширение зоны допустимых для запуска ракеты угловых рассогласований между направлением линии прицеливания и направлением движения корабля-носителя.
Результаты математического моделирования показывают, что при запуске ракеты как с подвижной, так и с неподвижной пусковой установки поставленная цель может быть достигнута организацией управления ракетой на начальном, баллистическом участке ее полета, путем формирования команд наведения до начала управления ракетой по командам, формируемым блоком наведения. При этом целесообразно использовать сигналы углового рассогласования γлп линии прицеливания с направлением движения носителя (продольной осью корабля) и сигналы угловой скорости ωлп перемещения линии прицеливания.
Алгоритм формирования команд наведения ракеты на начальном участке траектории имеет вид
uн= χ(γлп+k·ωлп),
где uн - величина команды наведения;
χ, k - коэффициенты пропорциональности;
γлп - угловое рассогласование линии прицеливания с направлением движения корабля-носителя (его продольной осью);
ωлп - угловая скорость линии прицеливания.
При этом коэффициент k может быть выбран численно равным Δtну, где Δtну - временной интервал между моментами старта ракеты и начала ее наведения по командам, формируемым блоком наведения.
Естественно, полярность (знак) команд наведения uн должна соответствовать полярности команд, обеспечивающих движение ракеты в направлении линии прицеливания.
Для достижения технического результата в известную систему наведения ракеты с бортовым источником излучения, содержащую прицел, блок наведения, формирующий команды наведения с учетом отклонения ракеты относительно линии прицеливания, пусковую установку и устройство передачи команд наведения на ракету, введены блок формирования команд наведения на начальном участке траектории полета ракеты, таймер, коммутатор для подключения по сигналам таймера входов устройства передачи команд наведения на ракету к выходам блока наведения или блока формирования команд наведения на начальном участке траектории полета ракеты и датчик схода ракеты с пусковой установки, причем блок формирования команд наведения на начальном участке траектории полета ракеты соединен с выходами датчиков углового положения и угловой скорости линии прицеливания в двух взаимно ортогональных плоскостях, первый и второй входы коммутатора соединены с блоком наведения, его третий и четвертый входы соединены с блоком формирования команд наведения на начальном участке траектории полета ракеты, а выходы - с устройством передачи команд наведения на ракету, датчик схода ракеты с пусковой установки через таймер соединен с пятым входом коммутатора.
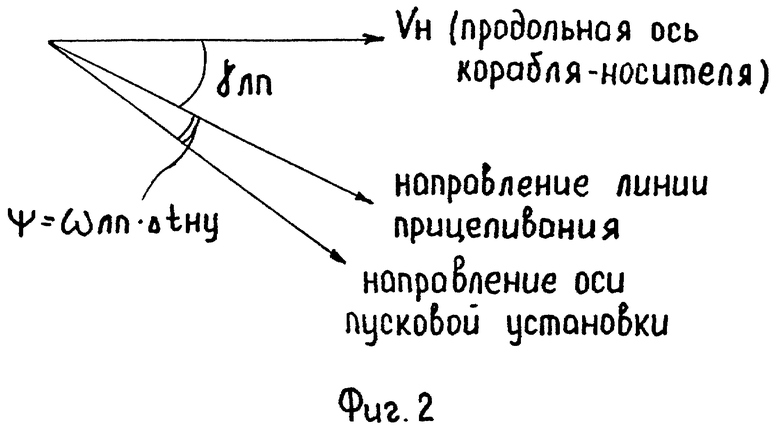
На фиг. 1 приведено схематичное изображение корабельной системы наведения ракеты в соответствии с настоящим предложением.
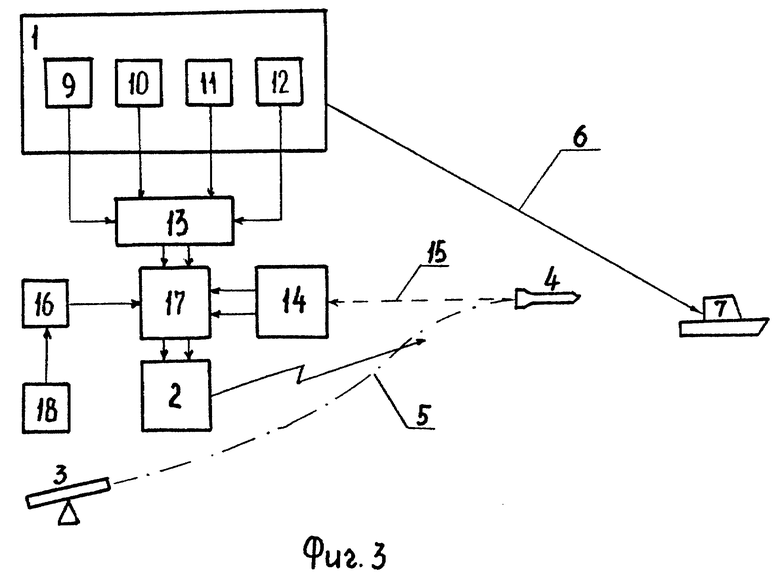
На фиг. 2 приведен рисунок, поясняющий алгоритм разворота пусковой установки относительно направления движения корабля-носителя.
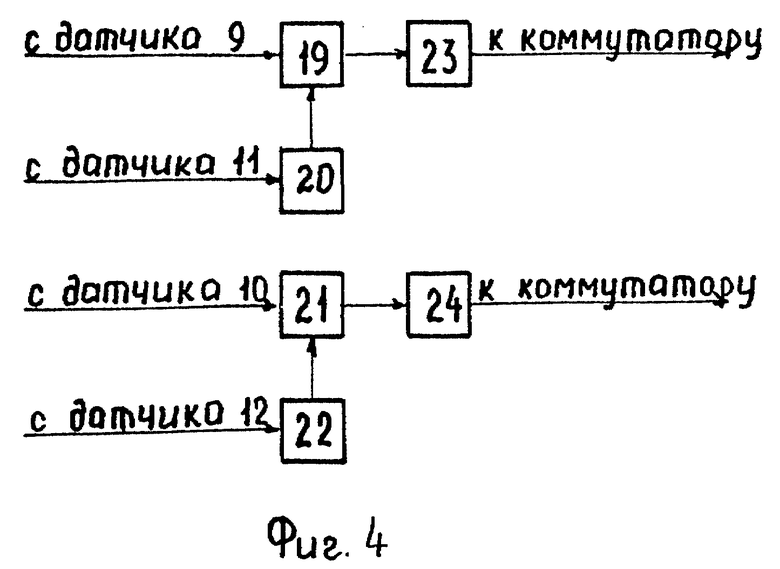
На фиг. 3 приведена структурная схема корабельной системы наведения ракеты в соответствии с настоящим предложением.
На фиг. 4 приведена структурная схема блока формирования команд наведения на начальном участке траектории полета ракеты.
На фиг. 1 схематично показан один из вариантов взаимного расположения прицела 1, с которым оптически съюстирован блок наведения, устройства передачи команд наведения на ракету 2 и пусковой установки 3, с которой стартует ракета 4 по траектории 5 (штрихпунктирная линия). Оптическая ось прицела (линия прицеливания) 6, направленная на судно-цель 7, показана непрерывной линией, а границы поля зрения 8 блока наведения - пунктиром.
Фиг. 2 схематично поясняет алгоритм разворота подвижной пусковой установки относительно направления движения корабля-носителя комплекса управляемого ракетного вооружения. При этом символом Vн обозначен вектор скорости движения корабля-носителя (направление его продольной оси), символом γлп обозначен угол между направлением движения корабля-носителя и направлением линии прицеливания, а символом Ψ = ωлп·Δtну - угол между направлением линии прицеливания и направлением оси пусковой установки.
Заявляемая корабельная система наведения ракеты (см. фиг. 3) включает прицел 1, оптическая ось которого (линия прицеливания) 6 направляется на судно-цель 7, с датчиками угловой скорости 9, 10 и углового положения 11, 12 линии прицеливания 6 в двух взаимно ортогональных плоскостях, блок формирования команд наведения на начальном участке траектории полета ракеты 13, блок наведения 14, формирующий команды неведения ракеты 4, имеющей бортовой источник излучения в направлении 15, противоположном направлению ее полета, которая стартует с пусковой установки 3 по траектории 5 (штрихпунктирная линия), таймер 16, коммутатор 17 для подключения по сигналам таймера 16 входов устройства передачи команд наведения на ракету 2 к выходам блока наведения 14 или блока формирования команд наведения на начальном участке траектории полета ракеты 13 и датчик схода ракеты с пусковой установки 18, при этом блок формирования команд наведения на начальном участке траектории полета ракеты 13 соединен с выходами датчиков угловой скорости 9, 10 и углового положения 11, 12 линии прицеливания 6 в двух взаимно ортогональных плоскостях, первый и второй входы коммутатора 17 соединены с блоком наведения 14, его третий и четвертый входы соединены с блоком формирования команд наведения на начальном участке траектории полета ракеты 13, а выходы - с устройством 2 передачи команд наведения на ракету 4, датчик схода ракеты с пусковой установки 18 через таймер 16 соединен с пятым входом коммутатора 17.
Блок формирования команд наведения на начальном участке траектории полета ракеты 13 реализован в соответствии со структурной схемой, приведенной на фиг. 4. Он включает сумматоры 19, 21, фазочувствительные выпрямители 20, 22 и масштабирующие каскады 23, 24, причем первые входы сумматоров 19, 21 соединены с выходами датчиков 9, 10 угловой скорости линии прицеливания в двух взаимно ортогональных плоскостях соответственно, вторые входы сумматоров 19, 21 через фазочувствительные выпрямители 20, 22 соединены с выходами датчиков 11, 12 углового положения линии прицеливания в двух взаимно ортогональных плоскостях соответственно, а выходы сумматоров 19, 21 через масштабирующие каскады соединены со входами коммутатора 17.
При использовании для запуска ракеты подвижной пусковой установки система функционирует следующим образом.
При обнаружении цели оператор наводит оптическую ось прицела 6 на центр контура цели 7 и производит пуск ракеты 4. На начальном участке траектории полета 5 ракеты 4 до момента tну начала управления ею по командам, формируемым блоком наведения 14, входы устройства передачи команд наведения на ракету 2 через коммутатор 17 подключены к выходам блока формирования команд наведения на начальном участке траектории полета ракеты 13, соединенного с выходами датчиков 9, 10 угловой скорости и датчиков 11, 12 углового положения линии прицеливания в двух взаимно ортогональных плоскостях, в частности, горизонтальной и вертикальной. При этом в течение временного интервала Δtну с момента старта ракеты до момента tну на нее подаются команды наведения
uн= χ(γлп+ωлп·Δtну)
в каждой из двух взаимно ортогональных плоскостей. Тем самым учитывается влияние бокового скоростного напора воздушного потока в каждой из плоскостей и улучшается точность "встреливания" ракеты в поле зрения блока наведения.
В момент tну по сигналу с таймера 16, запускаемого датчиком схода ракеты 18, срабатывает коммутатор 17, отключающий входы устройства передачи команд наведения на ракету 2 от выходов блока формирования команд наведения на начальном участке траектории полета ракеты 13 и подключающий их к выходам блока наведения 14. С момента tну до попадания в цель управление ракетой осуществляется по командам, формируемым блоком наведения, оптическая ось которого съюстирована с оптической осью прицела (линией прицеливания). Блок наведения фиксирует излучение бортового источника излучения ракеты, направление которого противоположно направлению ее полета, и формирует команды наведения с учетом отклонения источника излучения ракеты от линии прицеливания.
При использовании для запуска ракеты неподвижной пусковой установки перед пуском ракеты необходимо совместить направление оси пусковой установки с направлением оптической оси прицела, направленной на цель. Поскольку пусковая установка жестко связана с корпусом корабля-носителя комплекса управляемого ракетного вооружения (исходное нулевое направление оптической оси прицела, при котором сигналы с датчиков ее углового положения в каждой из ортогональных плоскостей равны нулю, и продольная ось пусковой установки жестко сопряжены с продольной осью корабля), корабль необходимо развернуть в направлении на цель с точностью, необходимой для "встреливания" ракеты в поле зрения блока наведения. Чем больше угловое рассогласование между линией прицеливания и осью пусковой установки в момент старта, тем на большем расстоянии от линии прицеливания окажется ракета в момент tну начала управления по командам, формируемым блоком наведения. Поэтому точность совмещения должна обеспечивать как принципиальную возможность "встреливания" ракеты в поле зрения блока наведения, так и требуемую минимальную дальность стрельбы.
После старта ракеты до момента tну входы устройства передачи команд наведения на ракету 2 через коммутатор 17 подключены к выходам блока формирования команд наведения на начальном участке траектории полета ракеты 13, соединенного с выходами датчиков 9, 10 угловой скорости линии прицеливания и датчиков 11, 12 углового положения линии прицеливания в двух взаимно ортогональных плоскостях. При этом в течение временного интервала Δtну с момента старта ракеты на нее подаются команды наведения
uн= χ(γлп+ωлп·Δtну)
в каждой из двух взаимно ортогональных плоскостей. Тем самым учитываются как смещение линии прицеливания на углы Ψ = ωлп·Δtну за время Δtну, так и угловые рассогласования γлп линии прицеливания с осью пусковой установки в каждой из плоскостей, что существенно улучшает точность "встреливания" ракеты в поле зрения блока наведения.
В качестве прицела использован оптический прицел с гиростабилизированным головным зеркалом.
В качестве датчиков угловой скорости линии прицеливания использованы потенциометры рукоятки пульта наведения прицела. Закон управления гиростабилизатором - скоростной. При скоростном законе управления величины сигналов с потенциометров пульта наведения задают угловую скорость перемещения головного зеркала прицела (его оптической оси или линии прицеливания) в двух взаимно ортогональных плоскостях.
В качестве датчика углового положения линии прицеливания в каждой из двух взаимно ортогональных плоскостей использован трансформаторный датчик СКТ-265.
В качестве блока наведения использован пеленгатор инфракрасного излучения с разделенным на четыре одинаковые площадки фотоприемником, определяющий по импульсным сигналам бортового источника инфракрасного излучения ракеты ее отклонения относительно своей оптической оси по двум взаимно ортогональным направлениям, преобразуемые далее в соответствии с выбранным законом управления в команды наведения ракеты. Пеленгатор конструктивно вмонтирован в прицел, а его оптическая ось (оптическая ось объектива пеленгатора) съюстирована (совмещена) с оптической осью прицела (линией прицеливания).
Пусковая установка выполнена в виде рамы, на которой закреплен транспортно-пусковой контейнер с находящейся внутри ракетой, обеспечивающей стыковки электрических цепей ракеты с аппаратурой корабельного комплекса управляемого ракетного вооружения.
В первом случае рама выполнена подвижной, управляемой с помощью сервопривода по сигналам с датчиков углового положения и угловой скорости линии прицеливания. Во втором случае - неподвижной, жестко связанной с корпусом корабля.
В качестве устройства для передачи команд наведения на ракету использована радиолиния связи, в которой формируемые блоком наведения команды наведения ракеты подвергаются времяимпульсной модуляции. При этом они преобразуются в командные импульсы, временное положение которых относительно формируемых в радиолинии связи тактовых импульсов стабильной частоты определяется величиной и полярностью команд наведения ракеты. Для различения команд наведения во взаимно ортогональных плоскостях применено временное кодирование. Оно заключается в преобразовании командных и тактовых импульсов в кодовые группы, состоящие из трех импульсов. Кодовые группы командных и тактовых импульсов отличаются друг от друга различным расположением импульсов в тройках. Эти кодовые группы поступают в передатчик радиолинии связи, где преобразуются в мощные радиоимпульсы сверхвысокой частоты (СВЧ), которые с помощью передающей антенны излучаются в направлении линии прицеливания.
Трансформаторные датчики углового положения линии прицеливания, находящиеся в прицеле, подключены к трансформаторным приемникам антенны. Поэтому передающая антенна радиолинии связи перемещается синхронно с линией прицеливания и постоянно ориентирована в ее направлении.
На борту наводимой на цель ракеты установлен приемник-формирователь команд наведения, включающий в себя последовательно соединенные приемную антенну, СВЧ-фильтр, детекторную секцию, усилитель, выполненный на линиях задержки дешифратор, предназначенный для декодирования кодовых групп импульсов, и два триггера, выходы которых подключены к LC-фильтрам. Принимаемые антенной СВЧ-импульсы передатчика радиолинии связи фильтруются, детектируются и усиливаются. В дешифраторе каждая из принятых троек тактовых и командных импульсов сводится в один импульс, которые поступают далее на установочные входы триггеров. При этом тактовыми импульсами на выходе триггеров устанавливаются высокие уровни сигналов, а командными - низкие. На каждый из триггеров поступают командные импульсы, несущие информацию о командах наведения только в одной из двух взаимно ортогональных плоскостей. Формирующиеся на выходах триггеров команды, проходя через LC-фильтры, трансформируются в команды наведения, величина и полярность которых определяется временным положением командных импульсов относительно тактовых. Далее эти вновь восстановленные на борту ракеты команды наведения используются для управления ее аэродинамическими или газодинамическими рулями.
На борту ракеты установлен также источник излучения, направление излучения которого противоположно направлению ее полета, по сигналам которого блок наведения формирует команды наведения ракеты. В качестве такого источника использован импульсный инфракрасный излучатель, излучающий импульсы энергии с фиксированной частотой, кратной частоте следования тактовых импульсов, формируемых радиолинией связи и принимаемых бортовым приемником-формирователем.
Блок формирования команд наведения на начальном участке траектории полета ракеты выполнен в соответствии со структурной схемой, представленной на фиг. 3. В соответствии с этой схемой сигналы с датчиков 9, 10 угловой скорости линии прицеливания 6 в двух взаимно ортогональных плоскостях поступают на первые входы сумматоров 19, 21 соответственно. На вторые входы сумматоров 19, 21 через фазочувствительные выпрямители (ФЧВ) 20, 22 поступают сигналы с трансформаторных датчиков 11, 12 углового положения линии прицеливания в двух взаимно ортогональных плоскостях. ФЧВ преобразуют сигналы переменного напряжения с трансформаторных датчиков углового положения линии прицеливания в сигналы постоянного напряжения, пропорциональные угловым отклонениям линии прицеливания относительно исходного нулевого направления, с которым жестко сопряжена ось пусковой установки. На сумматорах сигналы угловой скорости и углового положения линии прицеливания суммируются в соответствии с алгоритмом γлп+ωлп·Δtну. Хотя угловые отклонения и угловые скорости имеют различные единицы измерения, сигналы с датчиков угла и угловой скорости линии прицеливания имеют одинаковую размерность - размерность электрического напряжения, поскольку и те, и другие датчики - электрические. Поэтому сигналы с датчиков угловой скорости линии прицеливания не нуждаются в дополнительных преобразованиях для получения сигнала углового упреждения ωлп·Δtну. Приведение сигналов с датчиков угловой скорости и углового положения линии прицеливания в соответствие друг другу осуществляется путем их суммирования с разными коэффициентами, что достигается использованием в качестве сумматоров суммирующих усилителей. При этом сигнал углового упреждения ωлп·Δtну формируется в виде компоненты выходного сигнала сумматора.
С выходов сумматоров сигналы γлп+ωлп·Δtну в каждой из двух взаимно ортогональных плоскостей поступают на масштабирующие каскады, преобразующие их в требуемые уровни команд наведения ракеты. С выходов масштабирующих каскадов сигналы uн= χ(γлп+ωлп·Δtну) в каждой из ортогональных плоскостей поступают на входы коммутатора.
В качестве сумматоров использованы суммирующие усилители, выполненные на операционных усилителях 140УД20Б.
Фазочувствительные выпрямители выполнены на операционных усилителях (см. В. С. Гутников. "Интегральная электроника в измерительных устройствах", стр. 123, Ленинград, Энергоатомиздат, 1988 г.).
Масштабирующие каскады выполнены на операционных усилителях 140НД20Б.
Коммутатор выполнен на функциональной микросхеме 590КН4.
В качестве таймера использован выполненный на функциональных логических микросхемах генератор с делителем частоты.
В качестве датчика схода ракеты использовано электромагнитное реле, обмотка возбуждения которого через перемычку на борту ракеты соединена с корпусом пусковой установки. При сходе стартующей ракеты с пусковой установки цепь питания обмотки возбуждения реле размыкается. При этом контакты данного реле, размыкаясь, снимают принудительное обнуление с таймера, который начинает отсчет временного интервала.
Проведенные расчеты и результаты моделирования показывают, что при использовании для запуска ракеты подвижной пусковой установки предлагаемое введение команд наведения на начальном участке траектории полета ракеты позволяет сократить минимальную дальность стрельбы корабельного комплекса управляемого ракетного вооружения более чем в 2 раза по сравнению с той, которая имеет место без введения данных команд, при следующих параметрах качки, воздействующих на судно-носитель комплекса управляемого ракетного вооружения: килевая качка с амплитудой до 5,5o и угловой скоростью до 10 град/c, бортовая качка с амплитудой до 12o и угловой скоростью до 15 град/c, рысканье с амплитудой до 5,6o и угловой скоростью до 2,8 град/c.
При использовании для запуска ракеты неподвижной пусковой установки введение дополнительных команд наведения при тех же параметрах качки позволяет осуществить трехкратное расширение зоны допускаемых для запуска ракеты угловых рассогласований между направлением линии прицеливания и осью неподвижной пусковой установки по сравнении с исходной, при сохранении минимальной дальности стрельбы, имеющей место в штилевую погоду (при отсутствии волнения моря).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОДНОКАНАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ (ВАРИАНТЫ) | 1995 |
|
RU2111522C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
Изобретение относится к системам наведения ракет и может быть использовано для наведения ракет, запускаемых с морских носителей, например с катеров. Технический результат - сокращение минимальной дальности стрельбы. Система включает прицел с датчиками угловой скорости и углового положения линии прицеливания в двух взаимно ортогональных плоскостях, блок наведения, формирующий команды наведения в зависимости от отклонения ракеты с бортовым источником излучения относительно линии прицеливания, пусковую установку, устройство передачи команд наведения на ракету, блок формирования команд наведения на начальном участке траектории полета ракеты, таймер. Система также содержит коммутатор для подключения по сигналам таймера входов устройства передачи команд наведения на ракету к выходам блока наведения или блока формирования команд наведения на начальном участке траектории полета ракеты и датчик схода ракеты с пусковой установки. Блок формирования команд наведения на начальном участке траектории полета ракеты соединен с выходами датчиков угловой скорости и углового положения линии прицеливания в двух взаимно ортогональных плоскостях, первый и второй входы коммутатора соединены с блоком наведения, его третий и четвертый входы соединены с блоком формирования команд наведения на начальном участке траектории полета ракеты, а выходы - с устройством передачи команд наведения на ракету, датчик схода ракеты с пусковой установки через таймер соединен с пятым входом коммутатора. 4 ил.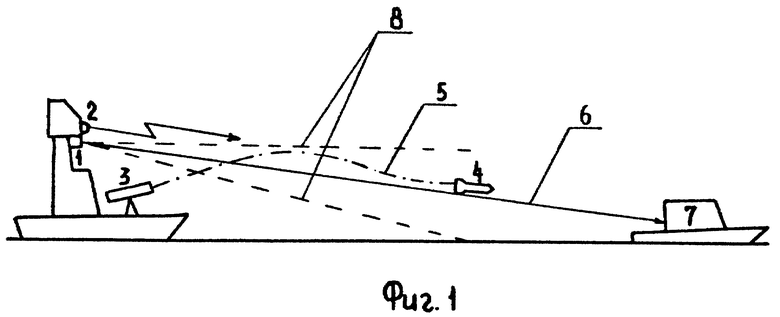
Корабельная система наведения ракеты с бортовым источником излучения, содержащая прицел, блок наведения, формирующий команды наведения в зависимости от отклонения ракеты относительно линии прицеливания, пусковую установку и устройство передачи команд наведения на ракету, отличающаяся тем, что в нее введены блок формирования команд наведения на начальном участке траектории полета ракеты, таймер, коммутатор для подключения по сигналам таймера входов устройства передачи команд наведения на ракету к выходам блока наведения или блока формирования команд наведения на начальном участке траектории полета ракеты и датчик схода ракеты с пусковой установки, причем блок формирования команд наведения на начальном участке траектории полета ракеты соединен с выходами датчиков углового положения и угловой скорости линии прицеливания в двух взаимно ортогональных плоскостях, первый и второй входы коммутатора соединены с блоком наведения, его третий и четвертый входы соединены с блоком формирования команд наведения на начальном участке траектории полета ракеты, а выходы - с устройством передачи команд наведения на ракету, датчик схода ракеты с пусковой установки через таймер соединен с пятым входом коммутатора.
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| Устройство для регистрации формы однократных электрических сигналов | 1986 |
|
SU1406533A1 |
| US 5322241 A, 21.06.1994. | |||

