Изобретение относится к системам управления ракет и может быть использовано в аппаратуре управления ракеты, вращающейся вокруг своей продольной оси.
Известен контур регулирования системы управления для дистанционно управляемого летательного аппарата вращающегося вокруг своей продольной оси, по патенту Великобритании N 1053713, в котором с помощью отделенного от летательного аппарата и входящего в пункт управления пеленгатора определяются сигналы отклонения летательного аппарата от базовой прямой в прямоугольной системе координат, затем преобразовываются в координаты полярной системы координат и далее, с помощью размещенного в пункте управления блока электронных схем, - в команды наведения, которые затем передаются на летательный аппарат, например, через проводную связь, соединяющую его с пунктом управления. При этом команды воздействуют на летательный аппарат таким образом, чтобы траектория его полета совпадала с базовой прямой.
В данном контуре регулирования системы управления угол поворота летательного аппарата вокруг его продольной оси с помощью выработанных в летательном аппарате опорных импульсов передается в пункт управления и там обрабатывается вместе с сигналами рассогласования, определенными пеленгатором, в блоке электронных схем таким образом, что в зависимости от определенного угла поворота выдается команда наведения, правильно отнесенная к этому углу. При этом опорные импульсы, выработанные в летательном аппарате, передаются по той же самой линии передачи, связывающей летательный аппарат с пунктом управления, вследствие чего эта линия передачи не может быть использована для передачи команд наведения от пункта управления к летательному аппарату в момент передачи опорных сигналов. Следовательно, при определенных углах поворота летательного аппарата, определяемых моментами передачи опорных импульсов, управление им с помощью команд наведения не осуществляется. Блок электрических схем, необходимый для расчета команд наведения, помимо прочего, достаточно сложен, т.к. для таких расчетов необходимо непрерывно восстанавливать положение летательного аппарата по углу вращения, при этом в качестве исходной информации в распоряжении имеется лишь один опорный импульс за один оборот.
Известен контур регулирования системы управления для дистанционно управляемого летательного аппарата, вращающегося вокруг своей продольной оси, по заявке ФРГ N 1802223, лишенный вышеуказанных недостатков. Он включает размещенный в пункте управления блок формирования команд наведения летательного аппарата, и размещенные на летательном аппарате потенциометрический датчик вращения летательного аппарата, токосъемник которого соединен с гироскопом, для выработки пилообразного напряжения, пропорционального углу поворота летательного аппарата, суммирующие усилители, переключатель, два компаратора и устройство приведения в действие газового руля.
К недостаткам данного устройства может быть отнесена необходимость преобразования сигналов отклонения летательного аппарата от базовой прямой, определенных в прямоугольной системе координат, в сигналы в полярной системе координат.
Для его устранения предлагается устройство для формирования одноканального сигнала управления вращающейся ракетой, содержащее блок формирования команд наведения, соединенный с гироскопом датчик вращения ракеты, два компаратора, усилитель мощности, связанный с приводом органа управления ракетой, отличающееся тем, что в него введены два управляемых ограничителя, два блока формирования модуля, два ограничителя и логическая схема ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом первый выход блока формирования команд наведения соединен с входом первого управляемого ограничителя и через последовательно соединенные первый блок формирования модуля и первый ограничитель - с входом второго управляемого ограничителя, второй выход блока формирования команд наведения соединен с вторым входом второго управляемого ограничителя и через последовательно соединенные второй блок формирования модуля и второй ограничитель - с вторым входом первого управляемого ограничителя, выходы первого и второго управляемых ограничителей соединены с входами компараторов, вторые входы которых соединены с выходами датчика вращения ракеты, а выходы - с входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которой соединен с усилителем мощности.
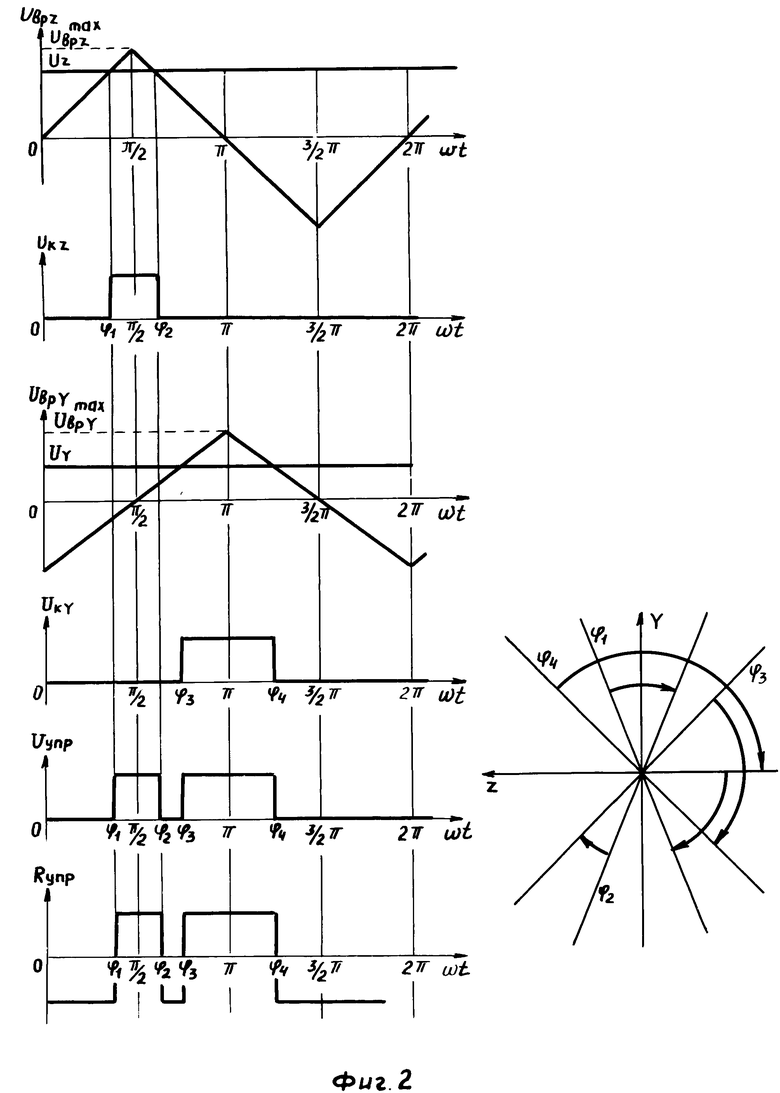
На фиг. 1, 2 представлены эпюры сигналов и годографы вектора управляющей силы, формируемой органом управления (рулевым органом) ракеты.
При этом использовались следующие обозначения:
Uz, Uy - команды наведения ракеты по взаимно перпендикулярным осям Z и Y соответственно;
Uвр.y, Uвр.z - сигналы пилообразной формы с датчика вращения ракеты;
U
Ukz, Uky - выходные сигналы компараторов;
Uупр - одноканальный сигнал управления рулевым органом ракеты;
Rупр - управляющая сила, формируемая рулевым органом ракеты;
ω - частота вращения ракеты;
t - время;
ϕ1-ϕ4 - углы перекладки органа управления ракеты.
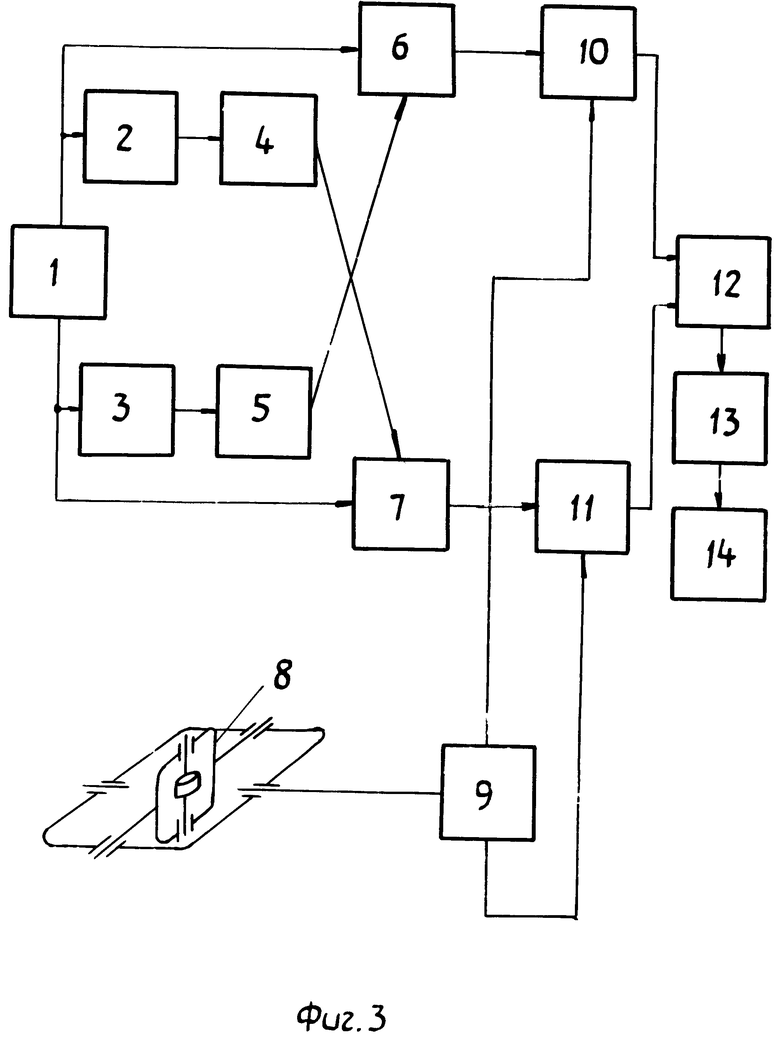
На фиг. 3, 6 приведены структурные схемы двух вариантов реализации предлагаемого устройства.
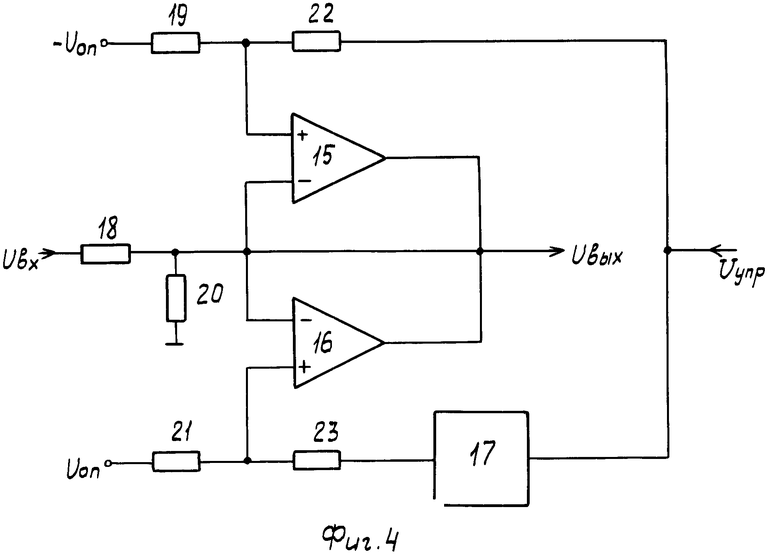
На фиг. 4 приведена функциональная схема реализации управляемого ограничителя.
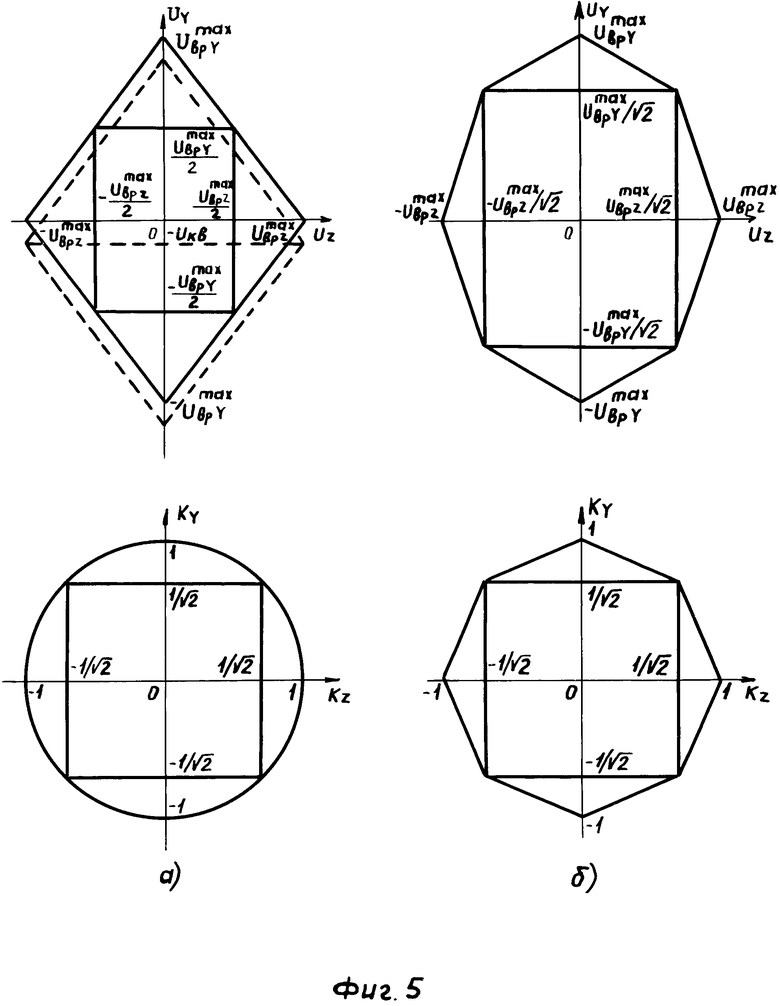
На фиг. 5 приведены графические зависимости, иллюстрирующие формирование уровней ограничения команд наведения и реализуемые при этом коэффициенты команд (Kz, Ky) при формировании датчиком вращения ракеты пилообразных (фиг. 5, а) и синусоидальных (фиг. 5, б) сигналов.
Символом Uкв обозначена команда компенсации веса ракеты, формируемая на борту последней.
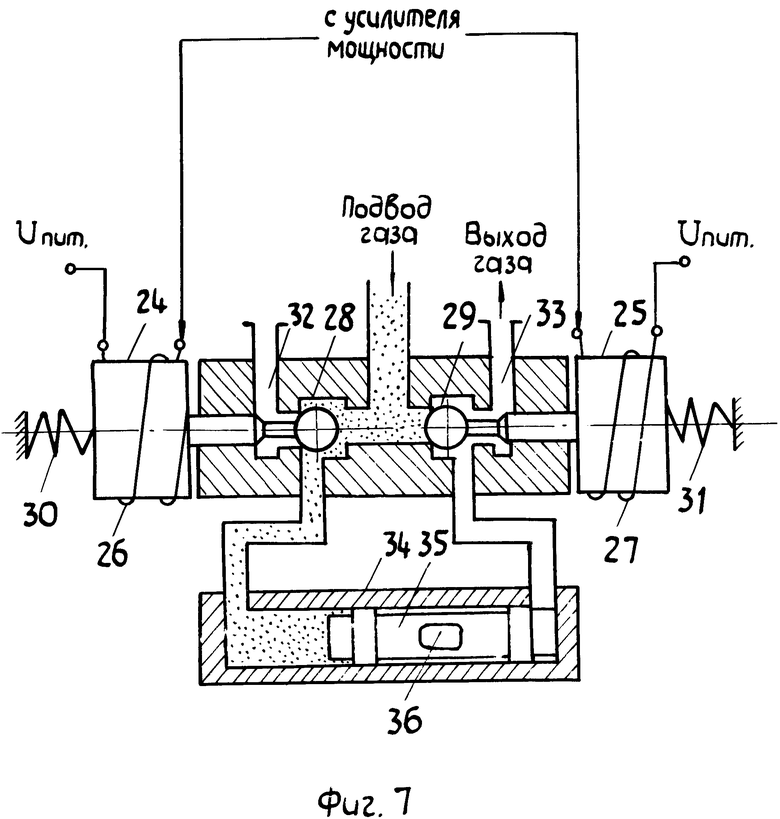
Фиг. 7 поясняет принцип работы привода органа управления ракеты на примере газовой релейной рулевой машинки.
Первый вариант устройства (см. фиг. 3) содержит блок формирования команд наведения 1, блоки формирования модуля 2, 3, ограничители 4, 5, управляемые ограничители 6, 7, соединенный с гироскопом 8 датчик вращения ракеты 9, компараторы 10, 11, логическую схему ИСКЛЮЧАЮЩЕЕ ИЛИ 12 и усилитель мощности 13, связанный с приводом органа управления ракеты 14, при этом первый выход блока формирования команд наведения 1 соединен с входом управляемого ограничителя 6 и через последовательно соединенные блок формирования модуля 2 и ограничитель 4 - с входом управляемого ограничителя 7, второй выход блока формирования команд наведения 1 соединен с вторым входом управляемого ограничителя 7 и через последовательно соединенные блок формирования модуля 3 и ограничитель 5 - с вторым входом управляемого ограничителя 6, выходы управляемых ограничителей 6 и 7 соединен с входами компараторов 10 и 11, вторые входы которых соединены с выходами датчика вращения ракеты 9, а выходы - с входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 12, выход которой соединен с усилителем мощности 13.
При этом управляемые ограничители 6, 7 (см. фиг. 4) выполнены на операционных усилителях 15, 16, инверторе 17 и резисторах 18, .. 23.
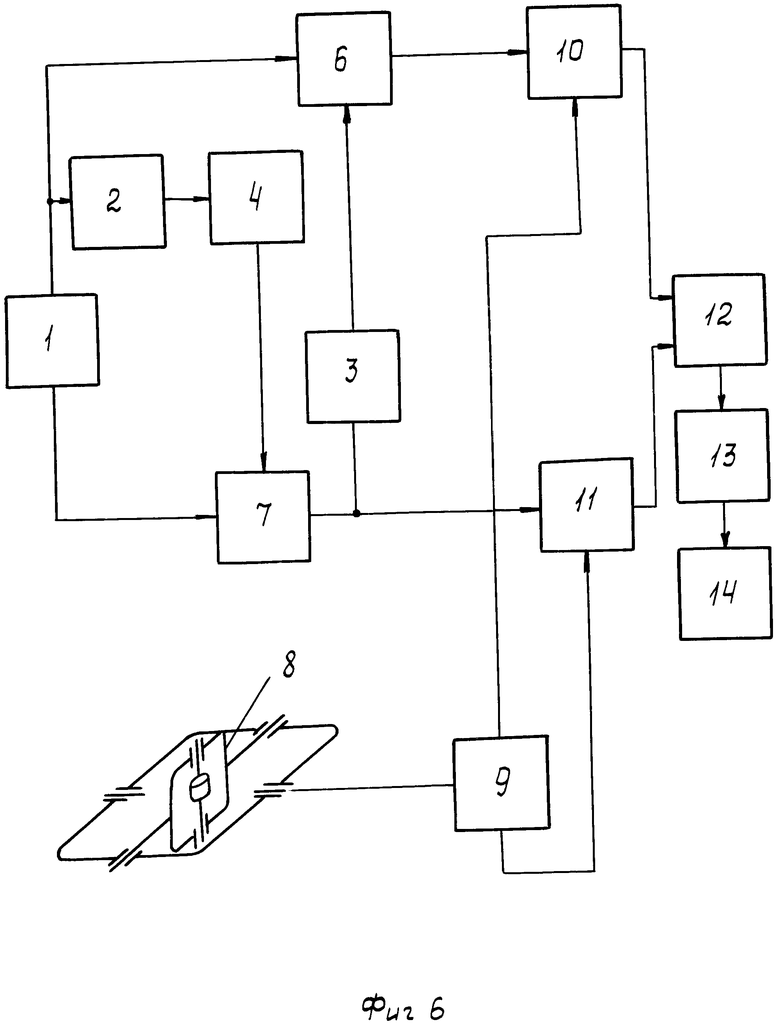
Второй вариант предлагаемого устройства (см. фиг. 6) содержит блок формирования команд наведения 1, блоки формирования модуля 2, 3, ограничитель 4, управляемые ограничители 6, 7, соединенный с гироскопом 8 датчик вращения ракеты 9, компараторы 10, 11, логическую схему ИСКЛЮЧАЮЩЕЕ ИЛИ 12 и усилитель мощности 13, связанный с приводом органа управления ракеты 14, при этом первый выход блока формирования команд наведения 1 соединен с входом управляемого ограничителя 6 и через последовательно соединенные блок формирования модуля 2 и ограничитель 4 - с входом управляемого ограничителя 7, второй выход блока формирования команд наведения 1 соединен с вторым входом управляемого ограничителя 7, выход которого через блок формирования модуля 3 соединен с вторым входом управляемого ограничителя 6, выходы управляемых ограничителей 6 и 7 соединены с входами компараторов 10 и 11, вторые входы которых соединены с выходами датчика вращения ракеты 9, а выходы - с входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 12, выход которой соединен с усилителем мощности 13.
Привод органа управления ракеты 14 (см. фиг. 7) содержит электромагниты с якорями 24, 25 и обмотками 26, 27, шарики 28, 29 левого и правого клапанов, пружины 30, 31, левую и правую полости выхлопа 32, 33, силовой цилиндр 34 и поршень 35 с пазом 36.
Принцип работы предлагаемого устройства основан на использовании для формирования одноканального сигнала управления вращающейся вокруг своей продольной оси ракетой двух пилообразных сигналов, пропорциональных углу поворота ракеты вокруг своей продольной оси, сдвинутых относительно друг друга на π/2 . Частота следования этих сигналов равна частоте вращения ракеты. При этом амплитуда сигналов непрерывно и равномерно изменяется по мере разворота ракеты вокруг оси от минимального до максимального значения и обратно.
Команды наведения ракеты, сформированные в прямоугольной системе координат с взаимно ортогональными осями Z и Y с целью воздействия на ракету таким образом, чтобы траектория ее полета совпадала с базовой прямой (направлением на цель), сравниваются на компараторах с пилообразными сигналами, пропорциональными углу поворота ракеты вокруг своей продольной оси. С выходов компараторов сигналы прямоугольной формы поступают на входы логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, формирующей одноканальный сигнал управления ракетой, поступающий на усилитель мощности и далее на привод органа управления ракеты, релейно перемещающегося из одного крайнего положения в другое.
Для пояснения преобразования команд наведения в одноканальный сигнал управления воспользуемся понятием коэффициента команд, под которым понимается отношение формируемой органом управления (ОУ) ракеты управляющей силы R, усредненной за период вращения ракеты вокруг своей продольной оси  , к ее максимально возможному значению
, к ее максимально возможному значению  .
.

Величина  достигает своего максимального значения при перекладывании ОУ из одного крайнего положения в другое с двухкратной частотой вращения ракеты (при перекладывании ОУ направление воздействующей на ракету управляющей силы меняется на противоположное). Применив для нахождения Rmax теорему о среднем и приняв во внимание, что мгновенное значение проекции управляющей силы на любое направление определяется формулой
достигает своего максимального значения при перекладывании ОУ из одного крайнего положения в другое с двухкратной частотой вращения ракеты (при перекладывании ОУ направление воздействующей на ракету управляющей силы меняется на противоположное). Применив для нахождения Rmax теорему о среднем и приняв во внимание, что мгновенное значение проекции управляющей силы на любое направление определяется формулой
R = Rупр•cos(ϕ-ϕ1), ,
получим ,
,
где
Rупр - воздействующая на ракету управляющая сила, развиваемая ее ОУ;
R - мгновенное значение проекции управляющей силы на то или иное направление;
ϕ - угол между осью OZ и вектором управляющей силы;
ϕ1 - угол между осью OZ и выбранным направлением.
Значение  меньше максимального в случае, когда ОУ за период вращения ракеты перекладывается больше двух раз. Эпюры напряжений, поясняющие механизм формирования одноканального сигнала управления ОУ, и годографы вектора управляющей силы приведены на фиг. 1, 2. При этом, помимо вышеприведенных использованы следующие обозначения:
меньше максимального в случае, когда ОУ за период вращения ракеты перекладывается больше двух раз. Эпюры напряжений, поясняющие механизм формирования одноканального сигнала управления ОУ, и годографы вектора управляющей силы приведены на фиг. 1, 2. При этом, помимо вышеприведенных использованы следующие обозначения:
Ukz, Uky - выходные сигналы компараторов.
Учитывая, что частота изменения команд наведения ракеты значительно ниже частоты ее вращения, а управляющее воздействие осредняется за период вращения ракеты, для наглядности пояснения положим, что на протяжение одного периода вращения ракеты команды наведения постоянны. С этой же целью будем считать, что перекладывание ОУ из одного крайнего положения другое происходит мгновенно.
Мгновенные значения пилообразных сигналов, пропорциональные углу поворота ракеты вокруг своей продольной оси, определяются из формул: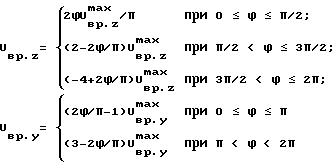
где
U
Используя эти соотношения, найдем значения углов ϕi (i = 1,..4), при которых перекладывается ОУ (когда Uвр.z = Uz и Uвр.y = Uy)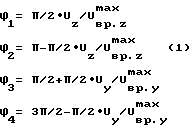
Из эпюр, приведенных на фиг. 1 и 2 видно, что чередование углов перекладки за период вращения ракеты различно при различных величинах команд наведения. Анализ причин изменения порядка следования углов перекладки (в первом случае (фиг. 1) ϕ1, ϕ3, ϕ2, ϕ4 , во втором (фиг. 2) ϕ1, ϕ2, ϕ3, ϕ4 показывает, что первая последовательность имеет место в случае выполнения неравенства ,
,
а вторая - при выполнении неравенства ,
,
где
При выполнении неравенства (2)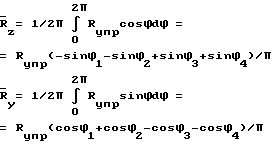
Подставив в эти выражения значения углов ϕ1-ϕ4 из (1) получим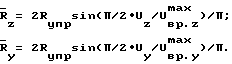
Коэффициенты команд при этом будут равны
При выполнении неравенства (3)
Коэффициенты команд в этом случае равны
Анализируя формулы (4) и (5) можно сделать следующие выводы:
при выполнении неравенства (2) коэффициент команды, формируемой ОУ ракеты в направлении каждой из осей Z и Y, определяется величинами команд наведения по этим осям, в связи с чем искажения процесса управления отсутствуют;
при выполнении неравенства (3) коэффициент команды, формируемой ОУ ракеты в направлении каждой из осей, определяется величиной команды наведения по другой оси, в связи с чем имеют место искажения процесса управления.
Для исключения возможности возникновения искажений процесса управления ракетой могут быть предусмотрены постоянные уровни ограничения команд наведения с целью обеспечения выполнения неравенства (2). При этом уровни ограничения команд наведения Uогр.z, Uогр.y могут устанавливаться либо одинаковыми, равными половине амплитуды пилообразных сигналов с датчиков вращения ракеты (при этом коэффициенты команд, формируемых ОУ ракеты в направлении каждой из осей, ограничиваются на уровне  , либо предпочтение отдается командам наведения по одной из осей (например, по оси Y), за счет уменьшения уровня ограничения команд наведения по другой оси.
, либо предпочтение отдается командам наведения по одной из осей (например, по оси Y), за счет уменьшения уровня ограничения команд наведения по другой оси.
Однако наличие постоянных уровней ограничения не позволяет реализовать максимальные коэффициенты команд в любом направлении. Например, если Uz = 0 Ky не превысит значения  даже в том случае когда
даже в том случае когда
Uy> U
Для устранения этого недостатка и повышения за счет этого точности наведения ракеты в устройство введены два управляемых ограничителя, два блока формирования модуля и два ограничителя.
Функциональная схема устройства приведена на фиг. 3.
Управляемые ограничители 6, 7 представляют собой двусторонние ограничители с управляемыми уровнями ограничения.
Устройство функционирует следующим образом. Команды наведения ракеты переменного знака с выхода двухканального блока формирования команд наведения 1 поступают на входы управляемых ограничителей 6, 7 а также на входы блоков формирования модуля 2, 3 преобразующих их в однополярные сигналы. Эти сигналы поступают далее на входы ограничителей 4, 5, ограничивающих их на уровнях равных половинам амплитуды пилообразных сигналов с датчика вращения ракеты Uвр.z и Uвр.y. Указанное ограничение введено с целью осуществления возможности поднятия уровней ограничения каждой из команд наведения только в том случае, когда величина команды наведения в другом канале меньше половины амплитуды пилообразного сигнала с датчика вращения. С выходов этих ограничителей сигналы поступают на входы управления уровнями ограничения управляемых ограничителей 6, 7.
Каждый из управляемых ограничителей 6, 7 команд наведения Uz и Uy может быть выполнен на двух операционных усилителях 15, 16 и инверторе 17, в соответствии со схемой, приведенной на фиг. 4. Входные сигналы (команды наведения по одной из осей), обозначенные на схеме через Uвх, через делитель напряжения, выполненный на резисторах 18, 20, поступают на инвертирующие вход операционных усилителей 15, 16. Сигналы управления уровнями ограничения положительной полярности Uупр, с ограничителя 4 или 5 поступают на неинвертирующий вход операционного усилителя 15 непосредственно и через инвертор 17 - на неинвертирующий вход операционного усилителя 16. Неинвертирующие входы операционных усилителей 15, 16 подключены также к источнику опорных сигналов. При этом на операционный усилитель 15 поступает опорный сигнал отрицательной полярности - Uоп, а на операционный усилитель 16 - опорный сигнал положительной полярности Uоп. Резисторы 19, 22 и 21, 23 подобраны таким образом, что при нулевом значении управляющего сигнала (т.е. при нулевом значении команды наведения по другой оси) на неинвертирующих входах операционных усилителей 15 и 16 устанавливаются напряжения, равные отрицательному и положительному амплитудным значениям пилообразного сигнала с датчика вращения ракеты соответственно.
При увеличении Uупр до величины Uоп/2 напряжения на неинвертирующих входах операционных усилителей 15 и 16 уменьшаются вдвое и становятся равными половинам отрицательной и положительной амплитуд этого сигнала соответственно. Масштабирование команды наведения, управляющей формированием уровней ограничения, осуществляется таким образом, чтобы при достижении ею половины амплитудного значения сигнала с датчика вращения ракеты сигнал Uупр становился бы равным Uоп/2. Масштабирование может быть осуществлено как в блоке формирования модуля (2, 3) так и в последовательно с ним соединенном ограничителе (4, 5). Напряжения на неинвертирующих входах операционных усилителей 15 и 16 задают уровни ограничения входного сигнала.
Следовательно, пока, например, величина команды наведения ракеты по оси Z Uz больше  , уровни ограничения управляемого ограничителя команды наведения по оси Y Uy будут равны ± U
, уровни ограничения управляемого ограничителя команды наведения по оси Y Uy будут равны ± U до нуля уровни ограничения управляемого ограничителя команды наведения Uy будут линейно возрастать от ± U
до нуля уровни ограничения управляемого ограничителя команды наведения Uy будут линейно возрастать от ± U
Таким образом, динамический диапазон команд наведения Uy (диапазон выходного сигнала управляемого ограничителя Uвых) изменяется в зависимости от величины команд наведения Uz. Точно такая же зависимость динамического диапазона команд наведения Uz от величины команд наведения Uy реализована в управляемом ограничителе команд наведения Uz.
Следует отметить, что с точки зрения достигаемого результата последовательность соединения блоков формирования модуля 2, 3 и ограничителей 4, 5 в цепях управления уровнями ограничения управляемых ограничителей 6, 7 не имеет принципиального значения. Разница лишь в том, что при включении ограничителя после блока формирования модуля он может быть выполнен односторонним, поскольку сигнал с блока формирования модуля однополярный. При включении ограничителя перед блоком формирования модуля он должен быть выполнен двусторонним, поскольку команды наведения ракеты по каждой из осей двуполярные.
Таким образом, в устройстве реализованы следующие законы управления верхними и нижними уровнями ограничения команд наведения Uz и Uy
где
Uогр.z, Uогр.y - уровни ограничения команд наведения Uz и Uy соответственно.
Вышеприведенные выражения учитывают принципиальную возможность различия между собой максимальных значений команд наведения Uz и Uy, когда
U
Ограниченные команды наведения ракеты с выходов управляемых ограничителей 6, 7 поступают на входы компараторов 10, 11, где сравниваются с пилообразными сигналами, пропорциональными углу поворота ракеты вокруг своей продольной оси, поступающими с датчика вращения ракеты 9. Выходные сигналы компараторов 10, 11 поступают на входы логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 12, формирующей одноканальный сигнал управления ракетой, и далее через усилитель мощности 13 - на привод органа управления ракеты 14.
Согласно формулам (4) запишем максимальные значения коэффициентов команд Kzmax, Kymax, которые могут быть достигнуты ,
,
Следовательно, в соответствии с формулами (4) между коэффициентом команды, формируемой ОУ ракеты в направлении оси Z и максимально возможным коэффициентом команды, которая может быть сформирована ОУ ракеты в направлении оси Y существует зависимость
K
Такая же зависимость между величинами Kzmax и Ky.
Графические зависимости, иллюстрирующие формирование уровней ограничения команд наведения и реализуемые при этом коэффициенты команд при пилообразных сигналах с датчика вращения ракеты, приведены на фиг. 5, а.
Иногда, учитывая динамические характеристики ракеты, возникает необходимость на отдельных участках траектории ее полета расширить динамический диапазон команд, формируемой ОУ ракеты в направлении одной из осей, т.е. обеспечить приоритетность команд наведения в направлении этой оси. Указанное расширение может быть осуществлено за счет принудительного ограничения динамического диапазона команд, формируемых ОУ в направлении другой оси. Такая необходимость может возникнуть, например, на конечном участке траектории полета ракеты, когда появляется потребность расширить диапазон команд, формируемых в направлении вертикальной оси с целью предотвращения проседания ракеты ниже линии прицеливания, вызванных недостаточными располагаемыми перегрузками. На начальном же участке траектории полета ракеты может возникнуть необходимость принудительного ограничения отрицательных команд, формируемых в направлении вертикальной оси с целью устранения возможности возникновения чрезмерных проседаний ракеты ниже линии прицеливания и столкновения с землей, также вызванных недостаточной располагаемой перегрузкой ракеты на этом участке траектории.
В обоих случаях сигналы на входы управления уровнями ограничения управляемых ограничителей команд наведения в горизонтальном направлении могут подаваться через коммутаторы, подключенные одновременно к источнику опорных сигналов. По сигналам с таймера на входы управления уровнями ограничения могут подаваться либо сигналы с последовательно соединенных блока формирования модуля и ограничителя, либо с источника опорных сигналов. При этом уровни ограничения ограничителей, соединенных последовательно с блоками формирования модуля, также могут изменяться по сигналам с таймера с целью поднятия уровня ограничения той команды наведения, динамический диапазон которой расширяется за счет принудительного ограничения динамического диапазона другой, в том случае когда величина последней меньше постоянных уровней ограничения задаваемых источником опорных сигналов.
Наилучшей же с точки зрения обеспечения возможности получения максимальных (равных единице) коэффициентов команд в любом направлении при одновременном обеспечении приоритетности команд наведения по какой-либо из осей будет такая реализация устройства, в которой либо постоянно, либо на отдельных участках траектории полета ракеты по сигналам с таймера уровни ограничения последовательно соединенных с блоками формирования модуля ограничителей устанавливаются равными K U
Предлагаемое устройство может быть использовано для расширения динамического диапазона команд, формируемых ОУ ракеты в направлении осей Z, Y и в том случае, когда датчик вращения ракеты формирует сигналы синусоидальной формы
Графические зависимости, иллюстрирующие формирование уровней ограничения команд наведения и коэффициентов команд формируемых ОУ ракеты для этого случая приведены на фиг. 5, б.
При этом уровни ограничения ограничителей 4, 5, последовательно соединенных с блоками формирования модулей 2, 3 необходимо выбрать равными  соответственно.
соответственно.
Выражения для углов ϕi , на которых перекладывается ОУ ракеты, при синусоидальной форме сигналов с датчика вращения ракеты могут быть записаны следующим образом:
Переход на синусоидальную форму опорных сигналов видоизменит неравенства (2) и (3) следующим образом:

При этом зависимости коэффициентов команд, формируемых ОУ ракеты, от величин команд наведения также изменятся и примут вид:
при выполнении неравенства (6)
Kz= Uz/U
при выполнении неравенства (7)
Последние соотношения указывают на наличие искажений процесса управления ракетой. В случае же выполнения неравенства (6) наблюдается линейная зависимость между коэффициентами команд и величинами команд наведения.
Для обеспечения выполнения неравенства (6) в управляемых ограничителях 6, 7 реализуются следующие зависимости между коэффициентами команды, формируемой ОУ ракеты в направлении одной из осей и максимально возможным коэффициентом команды, которая может быть сформирована ОУ ракеты в направлении другой оси
При этом в любом направлении могут быть получены коэффициенты команд не менее 0,924.
Таким образом, использование предлагаемого устройства для формирования одноканального сигнала управления вращающейся ракетой позволяет ОУ ракеты формировать максимальные команды в любом направлении при выработке датчиком вращения ракеты пилообразных сигналов, а также существенно расширяет динамический диапазон формируемых ОУ ракеты команд при выработке датчиком вращения ракеты сигналов синусоидальной формы. При этом в обоих случаях полностью исключается возможность возникновения искажений процесса управления.
Возможен и другой вариант реализации предлагаемого устройства, обеспечивающий достижение тех же целей, в соответствии с функциональной схемой, приведенной на фиг. 6.
При этом в устройство, содержащее блок формирования команд наведения, соединенный с гироскопом датчик вращения ракеты, два компаратора и усилитель мощности, связанный с приводом органа управления ракеты, введены два управляемых ограничителя, два блока формирования модуля, ограничитель и логическая схема ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом первый выход блока формирования команд наведения соединен с входом первого управляемого ограничителя и через последовательно соединенные первый блок формирования модуля и ограничитель - с входом второго управляемого ограничителя, второй выход блока формирования команд наведения соединен с вторым входом второго управляемого ограничителя, выход которого через второй блок формирования модуля соединен с вторым входом первого управляемого ограничителя, выходы первого и второго управляемого ограничителей соединены с входами компараторов, вторые входы которых соединены с выходами датчика вращения ракеты, а выходы - с входами логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которой соединен с усилителем мощности.
Ограничение команд наведения по одной из осей (например, по оси Y) осуществляется так же как и в вышеописанном варианте, а ограничение команд наведения по другой оси (оси Z) осуществляется автоматически. Функцию ограничителя, включаемого последовательно с блоком выделения модуля, выполняет управляемый ограничитель 7 команд Uy. При этом уровни ограничения команд наведения Uz равны
U
где
U
Закон изменения уровней ограничения команд наведения Uz, Uy может быть записан следующим образом:
Таким образом, второй вариант реализации устройства также позволяет получить равные единице коэффициенты команд в любом направлении при одновременном исключении возможности возникновения искажений процесса управления.
Блоки формирования модуля могут быть выполнены на операционных усилителя (см. Гутников В.С. Интегральная электроника в измерительных устройствах. Л.: Энергоатомиздат, 1988, с. 119).
Ограничители сигналов, последовательно соединенные с блоками формирования модуля, могут быть выполнены, например, на операционных усилителях с транзисторами в цепи обратной связи, шунтирующими ее при достижении входными сигналами уровней ограничения.
Датчик вращения ракеты может быть выполнен, например, потенциометрическим. При этом жестко связанный с корпусом ракеты потенциометр имеет равномерную кольцевую обмотку с двумя диаметрально противоположными отводами, соединенными с источником питания. Потенциометр снабжен двумя перпендикулярно расположенными токосъемниками, закрепленными на неподвижной рамке гироскопа. Такая реализация датчика вращения позволяет формировать два пилообразных сигнала, сдвинутых относительно друг друга на π/2 с одинаковыми амплитудами
U
Блок формирования команд наведения может включать, например, пеленгатор, определяющий по импульсным сигналам инфракрасного ответчика ракеты ее отклонение относительно линии прицеливания по двум взаимно ортогональным осям, преобразуемым далее в соответствии с выбранным законом управления в команды наведения ракеты, передаваемые на борт последней либо по проводам, либо с помощью лазерной, радио или инфракрасной линий связи.
С целью минимизации бортовой аппаратуры ракеты управляемые ограничители и цепи управления их уровнями ограничения могут быть реализованы в блоке формирования команд наведения, установленном в пункте наведения. При этом на борт ракеты будут передаваться команды наведения, ограниченные по описанному выше закону.
В том случае, когда для передачи команд наведения используется беспроводная линия связи, на борту ракеты может формироваться так называемая команда компенсации веса Uкв. Формирование этой, например, постоянной команды именно на борту ракеты объясняется тем, что в процессе ее полета по траектории возможны перерывы связи, т.е. перерывы в приеме команд наведения бортовым приемником ракеты, вызванные возникающим в боевой обстановке помехами, например, дымами, разрывами снарядов и мин между ракетой и передатчиком линии связи, перекрывающими направление передачи радиосигналов. Ее назначение состоит в том, чтобы во время этих перерывов связи под действием ничем не компенсируемого собственного веса ракета не просела бы ниже линии прицеливания и не задела бы за растительность или складки местности.
Если при этом цепи ограничения команд наведения реализованы в блоке формирования команд наведения, находящемся в пункте управления, то ограничение команд наведения должно осуществляться с учетом наличия на борту ракеты постоянной составляющей команды наведения по оси Y положительного знака Uкв. Для этого в цепь формирования уровней ограничения команды наведения Uz перед блоком формирования модуля может быть введен сумматор, на котором команда наведения Uy суммируется с Uкв. При этом уровни ограничения команды наведения Uz будут достигать максимального значения, равного U
В качестве компараторов могут быть использованы, например, функциональные микросхемы 521СА3.
В качестве схемы ИСКЛЮЧАЮЩЕЕ ИЛИ может быть использована, например, функциональная логическая микросхема 564ЛП2.
В качестве усилителя мощности может быть использован, например, релейный транзисторный усилитель с двумя оконечными каскадами, работающими в противофазе.
Привод органа управления ракетой может быть выполнен, например, в виде релейной рулевой машинки, управляющей перемещением аэродинамического или газового рулевого органа. Принцип ее работы пояснен на фиг. 7.
Выходы усилителя мощности 13 подключены к обмоткам 26, 27 левого и правого электромагнитов рулевой машинки, вторые концы которых подключены к источнику питания Uпит. При прохождении тока через правый электромагнит, якорь 25 этого электромагнита перемещает шарик 29 правого клапана, перекрывая проход газа в правую полость силового цилиндра 34 и открывает полость выхлопа 33. В этом время под действием давления газа шарик 28 левого клапана, преодолевая усилие пружины 30, перекрывает проход газа в полость выхлопа 32 и открывает проход в левую полость силового цилиндра 34 под поршень 35, вследствие чего поршень 35 перемещается в крайнее правое положение.
При прохождении тока через левый электромагнит, якорь 24 этого электромагнита перемещает шарик 28 левого клапана, перекрывая проход газа в левую полость силового цилиндра 34 и открывая полость выхлопа 32. В это время под действием давления газа шарик 29 правого клапана, преодолевая усилие пружины 31, перекрывает проход газа в полость выхлопа 33 и открывает проход в правую полость силового цилиндра 34 под поршень 35, вследствие чего поршень 35 перемещается в крайнее левое положение.
При работе рулевой машинки поршень 35 занимает одно из двух крайних устойчивых положений.
Поступательное перемещение поршня 35 через поводок, конец которого вставлен в паз 36 поршня 35, образуется в угловое перемещение рулевого органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 1995 |
|
RU2097821C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| КОРАБЕЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2165063C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2413918C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
Изобретение относится к системам управления ракетами и может быть использовано в аппаратуре управления ракетой, вращающейся вокруг своей продольной оси. Технический результат заключается в исключении искажений процесса управления, который достигается за счет того, что первый вариант устройства включает блок формирования команд наведения, соединенный с гироскопом датчик вращения ракеты, два компаратора, усилитель мощности, связанный с приводом органа управления ракеты, два управляемых ограничителя, два блока формирования модуля, два ограничителя и логическую схему ИСКЛЮЧАЮЩЕЕ ИЛИ. Второй вариант устройства включает блок формирования команд наведения, соединенный с гидоскопом датчик вращения ракеты, два компаратора, усилитель мощности, связанный с приводом органа управления ракеты, два управляемых ограничителя, два блока формирования модуля, ограничитель и логическую схему ИСКЛЮЧАЮЩЕЕ ИЛИ. 2 с.п. ф-лы, 7 ил.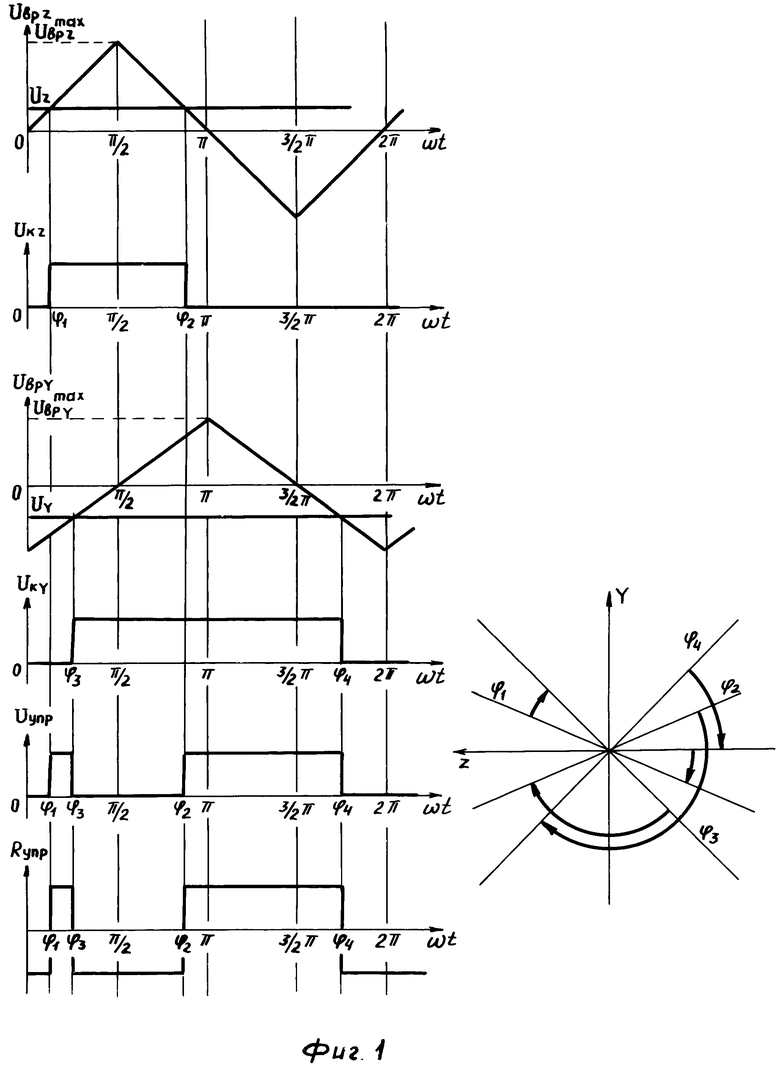
| DE, заявка, 1802223, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

