Изобретение относится к способу и системам управления летательными аппаратами, которые могут использоваться для борьбы с танками и другими малоразмерными целями, например, в лучевых системах теленаведения.
В системах теленаведения по лучу формируют пространственную структуру электромагнитного поля, создаваемую передающим устройством с пункта управления, при этом параметры поля управления функционально связаны с координатами соответствующих точек [1], например в системе декартовых координат “Z0Y”, где “Z” - величина координаты по курсу, “Y” - величина координаты по тангажу, “0” - начало координат, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения). Формирование поля управления осуществляют, например, сканированием диаграммы направленности в двух взаимно перпендикулярных направлениях по “Z” и “Y” соответственно, при этом пропорционально углу сканирования изменяют величину команд. Таким образом, в плоскости “Z0Y” поле имеет по краям единичные (с разными знаками, соответственно) значения команд, а в центре - нулевое. Бортовая аппаратура, расположенная на ракете, измеряет параметры электромагнитного поля, изменяемые по закону времяимпульсной модуляции (ВИМ), кодово-импульсной модуляции (КИМ), широтно-импульсной модуляции (ШИМ) и т.д., а затем определяет свое положение относительно “0”.
Известны способ формирования команд управления ракетой, вращающейся по углу крена, и ракета для его реализации [1]. Способ формирования команд заключается в том, что декодируют принимаемые сигналы управления в каналах тангажа и курса, а затем формируют сигнал для управления силовым (рулевым) приводом, при этом учитывают угол крена ракеты.
Ракета, вращающаяся по крену, содержит последовательно включенные приемник электромагнитного излучения, аппаратуру разделения каналов и декодирования, преобразователь координат (команд) и рулевой привод, при этом вход управления преобразователя координат соединен с датчиком крена (потенциометрическим), механически связанным с осью внешней рамки позиционного гироскопа. Как следует из [1], последовательно включенные приемник электромагнитного излучения и аппаратура разделения каналов и декодирования образуют приемный тракт. Автопилот, включающий устройство формирования команд с датчиками, трансформируется в преобразователь координат с гироскопическим датчиком крена с теми же функциями.
Эти известные способ формирования команд управления и ракета, основанная на нем, предназначены для управления ракетой по курсу и тангажу в командной радиолинии. Однако они могут применяться по своему прямому назначению также в лучевой системе теленаведения.
Поскольку в процессе полета ракеты к цели изменяются масса (из-за выгорания топлива) и скорость полета ракеты, т.е. ее основные характеристики, влияющие на величину поперечного ускорения в вертикальной и горизонтальной плоскостях, то изменяются и динамические характеристики, что приводит к ухудшению точности наведения ракеты на цель.
Следовательно, недостатком известных способа и ракеты для его реализации является низкая точность наведения ракеты на цель.
Задачей настоящего изобретения (способа и устройства) является повышение точности наведения ракеты за счет учитывания изменения параметров ракеты (во времени с момента пуска) и их компенсации путем соответствующего автономного изменения коэффициентов передачи по курсу и тангажу на борту ракеты.
Поставленная задача решается за счет того, что в способе формирования команд управления ракетой, вращающейся по углу крена, при котором на ракете формируют сигнал вращения, декодируют принимаемые сигналы управления и вырабатывают команды управления, дополнительно фиксируют момент появления сигнала вращения, задают им начало отсчета времени, в течение которого изменяют параметры аппаратуры управления ракетой и осуществляют корректировку команд управления ракетой.
Заявленный способ реализуется следующим образом. В приемном тракте декодируют принимаемые сигналы управления, дня чего принимают электромагнитное излучение ВИМ, КИМ, ШИМ, либо ВИМ и КИМ с амплитудной модуляцией несущего колебания (соответственно ВИМ-АМ и КИМ-АМ), ШИМ с частотной манипуляцией и дополнительной амплитудной модуляцией (ШИМ-ЧМн-АМ) и т.д., передаваемое по радио или оптической линии связи, преобразуют это излучение в электрический сигнал, который декодируют, выделяя при этом значение координат по курсу “Z” и тангажу “Y”. Величины координат определяют величины смещения ракеты относительно центра поля управления, а знак - направление смещения (соответственно, вверх, или вниз и влево, или вправо).
Поскольку величины координат соответствуют декартовой системе координат пункта управления, а ракета вращается по крену, то при формировании команд управления используют сигнал вращения, параметры которого изменяются в течение разворота ракеты (от 0 до 360°) вокруг своей оси и, соответственно, преобразуют команды управления из неподвижных декартовых координат пункта управления в декартовые, либо полярные координаты, вращаемые по крену с ракетой.
Сигнал вращения формируют с начала старта ракеты. Поэтому фиксация момента появления сигнала вращения соответствует началу вращения ракеты, т.е. началу движения ракеты, например поступательно-вращательному движению в контейнере, и задает начало отсчета времени на борту ракеты. В соответствии с текущим временем программно изменяют параметры аппаратуры управления ракетой, компенсирующие соответствующие изменения характеристик ракеты, и осуществляют корректировку команд управления ракетой.
Ракета, вращающаяся по углу крена, основанная на этом способе, содержит гироскопический датчик крена, рулевой привод и последовательно включенные приемный тракт и преобразователь координат, управляющий вход которого соединен с выходом гироскопического датчика крена, в нее введены фиксатор и формирователь изменяемых команд, при этом вход фиксатора подключен к выходу гироскопического датчика крена, выход фиксатора соединен с управляющим входом формирователя изменяемых команд, сигнальный вход которого подключен к выходу преобразователя координат, а выход - со входом рулевого привода.
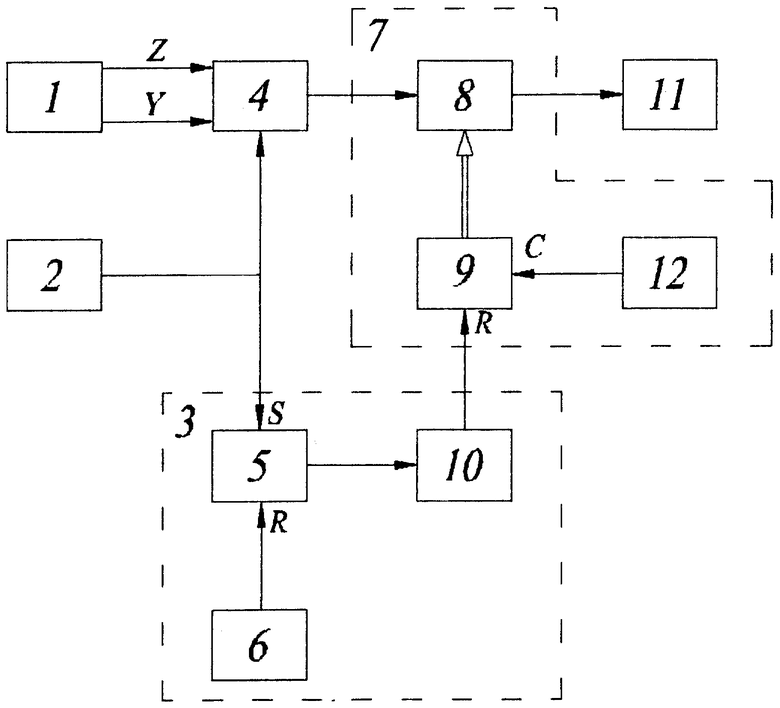
Предлагаемое устройство поясняется структурной электрической схемой, приведенной на чертеже, где представлены: 1 - приемный тракт, 2 - гироскопический датчик крена, 3 - фиксатор, 4 - преобразователь координат, 5 - RS-тригтер, 6 - обнулитель, 7 - формирователь изменяемых команд, 8 - коммутатор, 9 - счетчик, 10 - формирователь импульса, 11 -рулевой привод, 12 - синхронизатор.
Ракета, вращающаяся по углу крена, содержит последовательно включенные приемный тракт 1 и преобразователь координат 4, управляющий вход которого соединен с выходом гироскопического датчика крена 2. Вход фиксатора 3 подключен к выходу гироскопического датчика крена 2. Выход фиксатора 3 соединен с управляющим входом формирователя изменяемых команд 7, сигнальный вход которого подключен к выходу преобразователя координат 4. Выход формирователя изменяемых команд 7 соединен с рулевым приводом 11.
Приемный тракт 1 и рулевой привод (например, с одной парой рулей) 11 могут быть выполнены как в прототипе [1]. Аналогично может быть выполнен гироскопический датчик крена 2, с потенциометрическим съемом сигнала, с учетом [2]. Вместо потенциометра можно применить, например, преобразователь "угол-число" [3].
Фиксатор 3 может быть выполнен в виде RS-триггера 5, обнулителя 6 и формирователя импульса 10. RS-триггер 5, например - соответствующая микросхема серии 564. Обнулитель 6, например - дифференцирующая RC-цепочка, формирующая импульс в момент включения бортового источника питания. Формирователь импульса 10 может быть выполнен тоже как дифференцирующая RC-цепочка, которая формирует импульс из перепада напряжения с выхода RS-триггера 5.
Преобразователь координат 4 может быть выполнен, например, как схема формирования синусоидальных колебаний [4], в которой на входы S через те же резисторы подают сигнал (в той же полярности: прямой и инвертированный), например, после преобразования декартовых координат “ZOY” в полярные [4], а на входы А, В, С - с выхода преобразователя "угол-число".
Формирователь изменяемых команд 7 может быть выполнен с использованием коммутатора 8 (например мультиплексора на микросхеме 564 КП 2, выход которой подключен ко входу информационного усилителя, подключенного выходом ко входу рулевого привода 11). Входы управления мультиплексора соединены, соответственно, с выходами (разрядами) счетчика импульсов 9, счетный вход которого подключен к синхронизатору (кварцованному генератору импульсов) 12. Коммутируемые входы мультиплексора подключены к первым выводам соответствующих резисторов, вторые выводы которых объединены вместе и подключены к выходу преобразователя координат 4, при этом величины этих резисторов выбирают исходя из требуемых коэффициентов передачи.
Заявленная ракета, вращающаяся по углу крена, работает следующим образом. При нахождении ракеты на пусковой установке, перед стартом включают бортовой источник питания и раскручивают ротор гироскопа с последующей разарретацией его рамок. При включении бортового источника запитывается аппаратура ракеты и на выходе обнулителя 6 формируется разовый импульс, который устанавливает, например, по входу R нулевой уровень на выходе RS-триггера 5. Гироскопический датчик крена 2, механически связанный с осью внешней рамки гироскопа, выставлен так, чтобы в момент старта, соответствующего началу вращения ракеты по углу крена, вырабатывался передний фронт первого импульса, например, при четырехразрядном кодирующем диске [3] для одного из его разрядов. Передний фронт первого импульса, например скачок напряжения из нулевого логического уровня в единичный с выхода датчика крена 2, поступает на S вход RS-триггера 5 и выставляет на его выходе единичный логический уровень до конца полета. Формирователь импульса 10 формирует из сигнала с выхода RS-триггера 5 в момент его срабатывания импульс.
Таким образом, в момент старта (до начала управления ракетой) фиксатор 5 формирует одиночный импульс, который устанавливает по входу R счетчик 9 в исходное состояние. Счетчик 9 начинает с нуля считать импульсы, поступающие на его счетный вход С с выхода синхронизатора 12.
При попадании ракеты в поле управления, приемный тракт 1 принимает электромагнитное излучение, преобразует его в электрический сигнал, который декодируется по курсу “Z” и тангажу “Y”, а затем поступает на преобразователь координат 4, где он преобразуется в сигнал, соответствующий развороту ракеты по крену, например, в полярной системе координат. С выхода преобразователя координат 4 сигнал поступает на сигнальный вход формирователя изменяемых команд 7 (коммутатор 8). На вход управления коммутатора 8 поступают импульсы с выхода счетчика импульсов 9. В соответствии с величиной двоичного числа на выходе счетчика импульсов 9, коммутатор 8 изменяет свой коэффициент передачи.
Таким образом, величина команды управления на выходе формирователя изменяемой команды 7 зависит как от отклонения ракеты относительно точки прицеливания по курсу “Z” и тангажу “Y”, так и от величины двоичного числа с выхода счетчика 9. Рулевой привод 11, отрабатывая эту команду, смещает ракету в точку прицеливания.
Как следует из изложенного выше, в заявленном устройстве автономно изменяют коэффициент передачи таким образом, чтобы он скомпенсировал изменение параметров ракеты в процессе ее полета. Аналогичным образом можно изменить фазу сигнала команды управления и т.д.
Следовательно, в способе формирования команд управления ракетой, вращающейся по углу крена, за счет того, что фиксируют момент появления сигнала вращения, задают им начало отсчета времени полета, в течение которого изменяют параметры аппаратуры управления ракетой и осуществляют корректировку команд управления ракетой, повышена точность наведения ракеты за счет учета изменения параметров ракеты во время полета и их компенсации путем соответствующих изменений параметров аппаратуры управления непосредственно на борту ракеты.
Введение в ракету, вращающуюся по углу крена, фиксатора и формирователя изменяемых команд, при котором вход фиксатора подключен к выходу гироскопического датчика крена, выход фиксатора соединен с управляющим входом формирователя изменяемых команд, сигнальный вход которого подключен к выходу преобразователя координат, а выход - со входом рулевого привода, повысило точность наведения ракеты за счет компенсации изменения параметров ракеты в процессе ее полета соответствующим изменением коэффициента передачи аппаратуры управления ракетой.
Источники информации:
1. Основы радиоуправления/Под ред. В.А. Вейцеля и В.Н. Типугина. М.: "Советское радио", 1973, стр. 44, 49-52, рис. 1.29, стр. 64-65, стр. 246-249, рис. 4.28.
2. Павлов В.А., Понырко С.А., Хованский Ю.М. Стабилизация летательных аппаратов и автопилоты. М.: "Высшая школа", 1964, стр. 208-210, рис. 6.11.
3. Демидов В.П., Кутыев Н.Ш. Управление зенитными ракетами. М.: Военное издательство, 1989, стр. 285-287.
4. Титце У., Шенк К. Полупроводниковая схемотехника. М.: "Мир", 1983, стр. 168, 453-454.
Группа изобретений относится к системам управления летательными аппаратами, а точнее к лучевым системам теленаведения ракет, и может быть использована для борьбы с военной техникой противника. Согласно способу на ракете формируют сигнал вращения. Затем декодируют принимаемые сигналы управления и вырабатывают команды управления. Фиксируют момент появления сигнала вращения, задают им начало отсчета времени, в течение которого изменяют параметры аппаратуры управления ракетой и осуществляют корректировку команд управления ракетой. Ракета содержит гироскопический датчик крена, рулевой привод и последовательно включенные приемный тракт и преобразователь координат, управляющий вход которого соединен с выходом гироскопического датчика крена. Ракета также содержит фиксатор и формирователь изменяемых команд. Вход фиксатора подключен к выходу гироскопического датчика крена. Выход фиксатора соединен с управляющим входом формирователя изменяемых команд, сигнальный вход которого подключен к выходу преобразователя координат, а выход - со входом рулевого привода. Реализация данных технических решений позволяет повысить точность наведения ракеты на цель. 2 н.п. ф-лы, 1 ил.
| ВЕЙЦЕЛЬ В.А | |||
| и др., “Основы радиоуправления”, М., “Советское радио”, 1973 г., с.с.44, 49-52, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| RU 94045441 А1, 20.10.1996 | |||
| Способ проведения исследования клеевых соединений многослойной втулки несущего винта вертолета | 2020 |
|
RU2742540C1 |

