Изобретение относится к плавающим механическим средствам, в частности моделям, используемым в учебно-познавательном процессе.
Ближайшим аналогом изобретения является средство для передвижения в (жидкой) среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания (авт. свид. СССР N 1186228, кл. А 63 Н 23/14; 1985).
Данное устройство имеет оригинальную кинематическую схему перемещения приводных элементов, что делает его достаточно занимательным, однако это устройство относится к моделям традиционной техники и не позволяет показывать некоторые "неожиданные" эффекты.
Можно также упомянуть созданное автором изобретения средство "Машина Романова механический атом 5", где в механической модели, содержащей плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, подвижные элементы выполнены в виде шарнирно установленной на оси жестко связанной с основанием планки, несущей на одном конце вращаемый узел с малой шестерней, а на другом конце - уравновешивающий груз, механизм перемещения элементов выполнен в виде закрепленного на основании электродвигателя с контактной шестерней на его валу, взаимодействующей с малой шестерней посредством жестко связанной с основанием и установленной соосно оси планки большой шестерни, а также связанного своим валом с малой шестерней электродвигателя вращаемого узла, систем коммутации обоих электродвигателей и их питания, причем система коммутации содержит средства для включения электродвигателя с контактной шестерней при перемещении вращаемого узла по дуге большой шестерни, ближайшей к валу этого электродвигателя, и отключения электродвигателя в других фазах перемещения вращаемого узла по большой шестерне.
Техническим результатом изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что "Машина Романова - "Механический атом 7", в отличие от известных средств для передвижения в среде представляет собой платформу (плавучее основание), на которой со смещением от центра на двух стойках горизонтально расположена большая шестерня. В ее центре на подшипнике в оси находится планка, несущая на себе на одном конце уравновешивающий груз, на другом малый двигатель, соединенный с большой шестерней посредством малой шестеренки, в нижней части которой закреплен горизонтально стержень с подвижными подпружиненными грузами.
Сущность изобретения иллюстрируется чертежами на фиг. 1 (общий вид) и на фиг. 2 (вид сверху), где обозначено: 1 платформа (плавучее основание); 2 - стойки; 3 большая шестерня; 4 малый двигатель; 5 шестеренка; 6 планка; 7 уравновешивающий груз; 8 подпружиненные грузы; 9 большой электродвигатель; 10 диск оси большого электродвигателя; 11 диск на перемещающейся оси; 12 шток электромагнита; 13 электромагниты; 14 - батарея; 15 контактная система.
Снизу большой шестерни установлен большой электродвигатель, на его оси, направленной внизу, к платформе закреплен диск, соединенный с другим диском, стоящим на платформе горизонтально на перемещающейся оси, связанной со штоком, ведущим к электромагниту.
Питание от батареи (14) поступает к электродвигателям и электромагниту через контактную систему (15), находящуюся в центре большой шестерни.
Работа "Машины Романова "Механический атом 7" осуществляется следующим образом.
Когда включается питание электродвигателей от батареи 14, движение малого электродвигателя 4 начинается с точки "А", против часовой стрелки (фиг. 2).
Перемещаясь по дуге большой шестерни 3, малая шестеренка совершает определенное количество оборотов вместе с подпружиненными грузами 8, находящимися на стержне.
Дойдя до точки "В", малый электродвигатель с помощью системы 15 (фиг. 2) переключается, и его ось начинает вращаться в противоположную сторону, затормаживая планку 6. Одновременно отключается питание большого электродвигателя 3, но включается электромагнит 13, соединяющий диск 10 на оси большого электродвигателя 9 с диском 11 на перемещающейся оси. Этот процесс торможения всей вращающейся системы совершается до входа в точку "А2 малого электродвигателя.
Насколько подробнее рассмотрим все взаимодействия вращающихся элементов.
Когда начинает работать малый электродвигатель 4, перемещаясь по левой стороне большой шестерни 3 с точки "А", малая шестерня 5, соединяясь зубьями с большой шестерней 3, толкает ее в противоположную сторону.
При каждом обороте шестеренки 5 подпружиненные грузы 8, находящиеся на стержне, под действием инерционных (центробежных) сил удаляются от центра, сжимая пружины. Их передвижения по стержню, от центра к периферии, все время создают "нагрузку" малому электродвигателю 4, что и создает постоянное давление зубьев малой шестеренки 5 на большую шестерню 3. Такое действие малого электродвигателя 4 должно было бы поворачивать вокруг центра масс платформу 1 и все вращающиеся элементы, находящиеся на ней. Но этого не может происходить, так как в это время большой электродвигатель 9, вращающий диск 10 и создающий опору статору, дает возможность ему (статору), а значит и всей платформе 1, противодействовать усилиям малого электродвигателя 4.
Иными словами, возникают взаимодействия двух независимых систем. Малый электродвигатель 4 своей шестерней 5 давит на большую шестерню 3, то есть на платформу 1, стремясь ее повернуть, а большой электродвигатель 9, опираясь на массу своего диска 10 действием статора, противодействует усилиям малого электродвигателя.
В результате этих взаимодействий возникает однонаправленное поступательное движение всей механической системы, находящейся на платформе.
Эти действия совершаются на протяжении всего пути малого электродвигателя 4, идущего по левой стороне большой шестерни 3.
С переходом на правую сторону большой шестерни 3, как было уже выше сказано, малый электродвигатель 4 переключается на противоположное вращение оси торможение. Но вращающийся по инерции стержень с подпружиненными грузами 8 при торможении давит теперь на большую шестерню 3 "впереди себя", стараясь повернуть всю систему вокруг центра масс. Но такой поворот опять не возможен, так как диск 10, находящийся на оси большого электродвигателя 9, соединившись с диском 11 на перемещающейся оси в момент включения электромагнита 13, затормаживается его инертной массой.
Эти действия противодействуют поворотному движению платформы 1 и вновь создают поступательное движение платформе 1 в ту же сторону, в какую было совершено ранее. Таким образом, и на правой стороне большой шестерни 3 возникают два действия, с одной стороны тормозящий момент самого диска 10 большого электродвигателя 9, и при этом его усилие на перемещающуюся ось диска 11, с другой стороны давление малой шестеренки 5 на зубья большой шестерни 3 ("впереди себя").
Суммируя опять эти действия, платформа 1 (плавучее основание) приобретает однонаправленное движение в том же, первоначальном, направлении.
Но такое взаимодействие двух независимых систем, создающих поступательное движение, возможно только в условиях невесомости на воде, так как в работе участвуют не только вращающиеся элементы, находящиеся на платформе 1 (плавучем основании), но участвует также и сама платформа 1 (плавучее основание).
В самом деле, если бы мы просто поставили плавучее основание на стол, мы не увидели бы реакций от усилия малой шестеренки на большую шестерню, а также реакцию статора от нагрузки диска на оси большого электродвигателя.
Только условия водной среды ("имитация невесомости") вносит все сложные взаимодействия в этот механизм, ибо здесь взаимодействуют не только "видимые" подвижные элементы, а участвует в этом процессе само плавучее основание.
Когда малый электродвигатель 4 совершает движение по левой стороне большой шестерни 3, под действием центробежных сил подпружиненные грузы перемещаются от центра к периферии, сжимая пружины. Их перемещение гасит инерцию вращения оси малого электродвигателя 4, и таким образом создает электродвигателю 4 нагрузку и этим самым постоянное давление малой шестеренки 5 на зубья большой шестерни 3. Когда малый электродвигатель 4 перемещается по правой стороне большой шестерни 3, процесс торможения заставляет подпружиненные грузы вращаться к центру (под действием разжимающихся пружин). Их возвращение к центру, несмотря на тормозящее движение оси, ускоряет вращение стержня (согласно эффекту Жуковского), что создает давление малой шестерни 5 на большую шестерню 3, толкая ее не назад, как было ранее, а вперед.
В "Машине Романова "Механический атом 7" статор большого электродвигателя 9 не соединен ни с какими внешними приспособлениями, а платформа 1 (плавучее основание) является самим "статором", поскольку соединена жестко с ним на большой шестерне.
Реакции статора возникают от вращения массы диска 10 на роторе и являются опорой для статора.
На платформе (плавучем основании) действуют две независимые системы это малый двигатель с шестерней и ротор большого электродвигателя. И если малый электродвигатель, соединенный шестеренкой с большой шестерней, стремится повернуть всю систему, то статор, опираясь на диск ротора, противодействует этому вращению, что и побуждает платформу перемещаться прямолинейно.
А можно сказать и наоборот. Статор, опираясь о ротор, на ось с диском, стремится повернуть всю систему вокруг центра масс, а малый электродвигатель своей шестеренкой, опираясь о большую шестерню, противодействует этому вращению и побуждает платформу перемещаться прямолинейно. И если доминирует в этом взаимодействии малый электродвигатель, платформа перемещается с креном в левую сторону. Если доминирует большой электродвигатель, платформа перемещается с креном в правую сторону. Поэтому в контактной системе должны работать регулирующие сопротивления при подаче питания в электродвигатели.
Существенные изменения, отличающие изобретение от его ближайшего аналога, следующие.
1. Малая шестерня 5 малого электродвигателя 4 несет на себе стержень с подпружиненными грузами 8 (фиг. 1). Это устройство создает условия постоянного давления на большую шестерню 3 на протяжении всего пути малого электродвигателя 4 по левой стороне большой шестерни 3, а также создает и по правой стороне большой шестерни давление, описанное выше.
2. В данном изобретении создан механизм торможения диска на оси большого электродвигателя 9 посредством присоединения к нему диска на перемещающейся оси 11, связанной со штоком 12 электромагнита 13 (фиг. 1), что является необходимым устройством в работе машины, где каждый последующий цикл должен начинаться с нуля или определенного уровня движения вращающихся элементов.
3. Самое большое отличие заключается в том, что в "Машине Романова - "Механический атом 7" ротор большого электродвигателя 9 не соединен с планкой 6, где закреплен малый электродвигатель 4.
Система "Машина Романова "Механический атом 5" не имеет устройств, описанных выше в пунктах 1, 2 и 3; ее работа поступательное движение менее эффективна.

Использование: при создании плавающих механических средств, в частности моделей для целей учебно-познавательного процесса. Сущность изобретения: при имитации невесомости на водной поверхности перемещение модели, включающей платформу с подвижными элементами, достигается не за счет реактивной силы и не вследствие вращения эксцентрических грузов (безопорным, инерцоидным движением), а вследствие взаимодействий двух механических систем с участием подвижного (малого) и неподвижного электродвигателей, в последнем из которых существенно использован в работе не только ротор, но и статор, жестко связанный с платформой, что в условиях имитации невесомости (на воде) возбуждает реальную силу, вследствие которой и достигается эффект однонаправленного поступательного движения всей механической системы. 2 ил.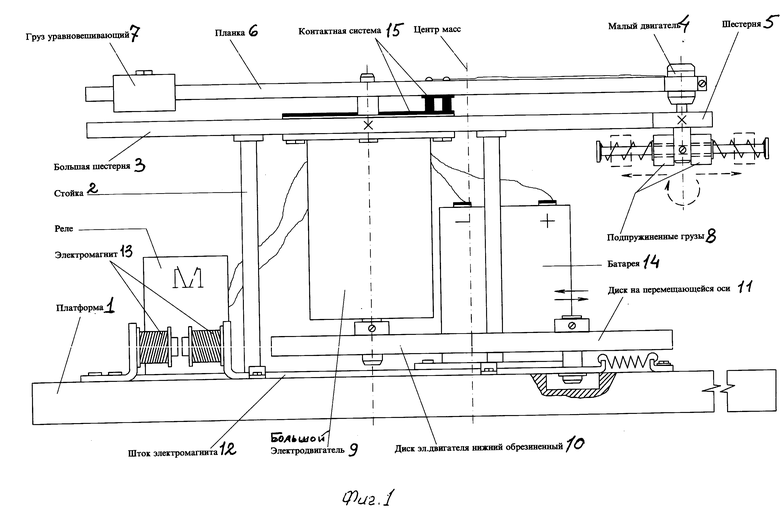
Средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, отличающееся тем, что состоит из платформы, на которой со смещением от центра на двух стойках горизонтально расположена большая шестерня, в ее центре на оси в подшипнике закреплена планка, несущая на себе на одном конце уравновешивающий груз, на другом малый электродвигатель, соединенный с большой шестерней посредством малой шестерни, в нижней части которой закреплен горизонтально стержень с подпружиненными грузами, а снизу большой шестерни установлен большой электродвигатель, на его оси, направленной книзу к платформе, закреплен диск, соединенный с диском, стоящим на платформе горизонтально на перемещающейся оси, связанной со штоком, ведущим к электромагниту, который включен в общую контактную энергосистему.
| Игрушечное судно | 1984 |
|
SU1186228A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
