Изобретение относится к плавающим механическим средствам (игрушкам), в частности моделям, где при погружении в среду (воду) масса приобретает невесомость, и используется в учебно-познавательном процессе.
Данная заявка является развитием известного из патента на изобретение РФ №2314854 средства для передвижения в среде, содержащего плавучее основание, на котором неподвижно статором закреплен большой двигатель, и расположенный со смещением от центра основания малый электродвигатель и контактную систему для подачи питания.
Как видно из фигуры 2 ближайшего аналога (см. РФ №2314854), большой и малый электродвигатели расположены радиально на краях плавучего основания.
Большой электродвигатель закреплен на правой стороне плавучего основания, а малый - на левой стороне.
Если включить питание только одному большому электродвигателю, то плавучее основание под действием статора начнет вращаться вокруг центра масс (при этом ротор двигателя будет вращаться по направлению часовой стрелки). Но если одновременно с большим включить питание малому электродвигателю (его ротор будет вращаться против часовой стрелки), то плавучее основание под действием статора малого электродвигателя начнет двигаться поступательно и однонаправлено.
Это объясняется тем, что малый электродвигатель усилием своего статора затормаживает вращение плавучего основания. Если бы усилие статора малого электродвигателя было бы недостаточным, то плавучее основание перемещалось бы, отклоняясь от прямой в правую сторону.
И наоборот, если усилие будет излишним, то вместо движения плавучего основания строго по прямой он будет отклоняться в левую сторону. Взаимодействие двух статоров большого и малого электродвигателей превращает вращательное движение плавучего основания в прямолинейное (поступательное).
Техническим результатом предлагаемого изобретения является расширение арсенала средств для изучения нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, на котором неподвижно статором закреплен большой двигатель, ротор которого имеет возможность вращения по часовой стрелке, и расположенный со смещением от центра основания малый электродвигатель, ротор которого имеет возможность вращения против часовой стрелки, и контактную систему для подачи питания. На оси ротора большого электродвигателя установлена стойка, на которой закреплена планка, а малый электродвигатель установлен на одном конце планки, при этом на другом конце планки расположен противовес, на оси которого установлен фрикционный ролик, имеющий возможность опирания на пластину, соединенную со статором большого двигателя, причем токоведущие дорожки контактной системы разделены на две ведущие дорожки, из которых дорожка большого электродвигателя имеет возможность придавать ему постоянное питание, а дорожка малого электродвигателя имеет возможность давать ему питание с перерывами.
Изобретение поясняется чертежами, на которых изображено на:
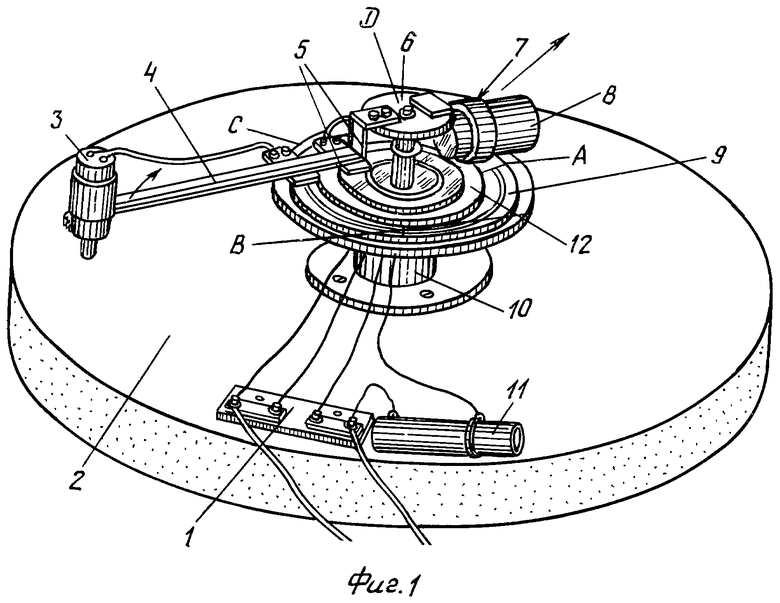
фиг.1 - общая схема средства для передвижения в среде;
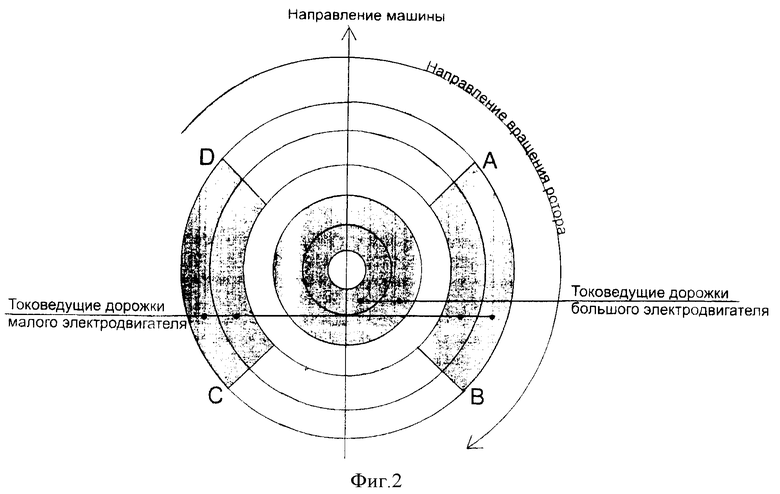
фиг.2 - схема контактной системы средства.
На фиг.1 изображено под следующими позициями:
1. Контакты питания;
2. Плавучее основание;
3. Малый электродвигатель;
4. Планка;
5. Контактная система большого электродвигателя;
6. Стойка;
7. Фрикционный ролик;
8. Противовес;
9. Контактная система малого электродвигателя;
10. Большой электродвигатель;
11. Сопротивление;
12. Пластина, соединенная со статором большого двигателя.
Как видно на схеме, на оси большого электродвигателя 10 располагается стойка 6, на которой закреплена планка 4, несущая на своем конце малый электродвигатель 3, а на другом ее конце - противовес 8 с осью. На оси противовеса установлен фрикционный ролик 7. Он соединен с пластиной 12, которая расположена на большом электродвигателе, статор которого соединен с плавучим основанием 2.
На пластине также расположены медные, токоведущие дорожки контактной системы, которые разделены на две ведущие дорожки. Дорожка 5 большого электродвигателя придает ему постоянное движение. Дорожка 9 малого электродвигателя придает ему питание с перерывами.
Работа машины начинается с включения электродвигателей в точке «А».
Ротор большого электродвигателя вращается по часовой стрелке.
Ротор малого (расположенного на конце планки) электродвигателя вращается против часовой стрелки. При этом нужно отметить, что его вращение против часовой стрелки создает усилие на статор малого электродвигателя и тем самым на планку, увлекая ее в противоположную сторону от направления вращения ротора большого электродвигателя.
Таким образом, когда малый электродвигатель перемещается по правой стороне окружности машины, усилие планки затормаживает ротор большого электродвигателя, что и является опорой статору, то есть плавучему основанию (статор большого электродвигателя соединен с последним). Эта опора планки создает усилие плавучего основания на ось электродвигателя, перемещая механизм машины.
Когда же планка доходит до точки «В», питание малого электродвигателя отключается и планка проходит расстояние по окружности до точки «С».
Оказавшись на левой стороне машины, малый электродвигатель вновь включается в точке «С».
При этом ротор малого электродвигателя, продолжая вращаться против часовой стрелки, перемещаясь по левой стороне окружности, меняет свое усилие на планку, увлекая ее в сторону вращения ротора большого электродвигателя.
Таким образом, перемещаясь по левой стороне окружности, он «тащит» за собой ротор большого электродвигателя.
В этих условиях на левой стороне ротор большого электродвигателя уже не представляет собой той противоположной опоры, которая была у него на противоположной стороне.
Иными словами нарушается динамическое равновесие в механизме. Облегченная левая сторона удлиненной стороны ротора создает опору на правой стороне машины, перемещая плавучее основание в том же направлении, что и было ранее.
Отключение питания малому электродвигателю в точках «В» и «Д» дает возможность его ротору совершать следующий цикл, где его вращение начинается с нуля, то есть ротор является инертной массой и через планку создает усилие на ротор большого электродвигателя.
Фрикционный ролик, смещаясь по своей дорожке, обеспечивает движение средства от возможных отклонений движения плавучего основания по прямой (влево или вправо) при движении ротора большого электродвигателя.
Большой электродвигатель оснащен регулирующим сопротивлением 11.
Это дает возможность подобрать питание электродвигателям в соответствии с их мощностью. Ибо только их определенное взаимодействие может обеспечить однонаправленное движение плавучему основанию.
Следует учитывать удаленность малого электродвигателя от центра плавучего основания. Чем больше его «орбита», тем большая может возникать скорость движения машины.
Такой способ движения можно использовать в космическом пространстве, в условиях невесомости и вакуума.
И все же, как объяснить это «неопознанное явление механики»? На самом деле это «неопознанное явление механики» зиждится на прочной основе высказывания Альберта Эйнштейна, его положения о том, что «масса и энергия эквивалентны».
Как видно на фиг.1, на правой стороне машины малый электродвигатель входит в точку «А», где ему включается энергия. Как описано ранее, вращение его ротора создает дополнительное усилие ротору большого электродвигателя. Это усилие является «увеличением массы» ротора большого электродвигателя и опорой для его статора.
Большой электродвигатель «воспринимает» это усилие, как появившуюся «массу», - то есть «эксцентрик», являющийся для него опорой.
Но разница между материальной массой эксцентрика и «эксцентриком» от энергии заключается в том, что эксцентрик, являющийся материальной массой, продолжал бы свое движение по всей окружности, превращая механизм машины в вибратор, лишая ее поступательного движения, а «эксцентрик», появляющийся от энергии, может возникнуть в определенном месте окружности и исчезнуть при отключении энергии.
С переходом планки на левую сторону машины, как уже описано ранее, ротор (малого электродвигателя) меняет свое усилие на планку, увлекая ее в сторону вращения ротора большого электродвигателя.
При этом усилии ротор большого электродвигателя теряет свою «массу», создавая «эксцентрик» на противоположной стороне механизма.
Таким образом, подтверждается положение Альберта Эйнштейна о том, что «масса и энергия эквивалентны». Их равенство подтверждается заявленным механизмом, его однонаправленным движением в условиях невесомости (в воде) и вакуума. Предлагаемое средство может также имитировать основные элементарные частицы атома: электрон, нейтрон, протон.
Изобретение относится к плавающим механическим средствам и может быть использовано в игрушках. Средство для передвижения в среде содержит плавучее основание, на котором неподвижно статором закреплен большой двигатель, ротор которого имеет возможность вращения по часовой стрелке, и расположенный со смещением от центра основания малый электродвигатель, ротор которого имеет возможность вращения против часовой стрелки. Средство также содержит контактную систему для подачи питания. При этом на оси ротора большого электродвигателя установлена стойка, на которой закреплена планка, а малый электродвигатель установлен на одном конце планки, причем на другом конце планки расположен противовес с опирающимся на пластину фрикционным роликом. Токоведущие дорожки контактной системы разделены на две ведущие дорожки, из которых дорожка большого электродвигателя имеет возможность придавать ему постоянное питание, а дорожка малого электродвигателя имеет возможность давать ему питание с перерывами. Изобретение обеспечивает возможность изучения сложного перемещения по воде. 2 ил.
Средство для передвижения в среде, содержащее плавучее основание, на котором неподвижно статором закреплен большой двигатель, ротор которого имеет возможность вращения по часовой стрелке, и расположенный со смещением от центра основания малый электродвигатель, ротор которого имеет возможность вращения против часовой стрелки, и контактную систему для подачи питания, отличающееся тем, что на оси ротора большого электродвигателя установлена стойка, на которой закреплена планка, а малый электродвигатель установлен на одном конце планки, при этом на другом конце планки расположен противовес, на оси которого установлен фрикционный ролик, имеющий возможность опирания на пластину, соединенную со статором большого двигателя, причем токоведущие дорожки контактной системы разделены на две ведущие дорожки, из которых дорожка большого электродвигателя имеет возможность придавать ему постоянное питание, а дорожка малого электродвигателя имеет возможность давать ему питание с перерывами.
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "СТАТОРНАЯ МАШИНА РОМАНОВА" | 2006 |
|
RU2314854C1 |
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 17" | 2001 |
|
RU2201276C1 |
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| RU 95121378 A, 27.12.1997 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 7" | 1995 |
|
RU2099123C1 |
| US 3854238 А, 17.12.1974 | |||
| US 5385501 А, 31.01.1995 | |||
| JP 7016358 А, 20.01.1995. | |||

