Изобретение относится к плавающим механическим средствам, где при погружении в среду (воду) масса приобретает невесомость.
Аналогом изобретения в жидкой среде является плавучее основание, установленные на основании подвижные элементы относительно основания (Авторское свид. СССР N 1186228, кл. А 63 H 23/24, 1995 г.).
Данное устройство имеет оригинальную кинематическую схему перемещения приводных элементов. Однако это устройство относится к моделям традиционной техники.
Из уровня техники для предложенной машины выявлено средство того же назначения, раскрытое в описании к патенту СССР, 2031685, кл. A 63 H 23/10, 1995. Средство для передвижения в среде, раскрытое в описании к этому патенту, является по совокупности существенных признаков наиболее близким аналогом предложенного изобретения и содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, большую шестерню, соединенную с малой шестерней, сидящей на оси малого электродвигателя, и третьей шестерней, и контактную систему для подачи питания к электродвигателям.
Область применения предлагаемого изобретения - изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, большую шестерню, соединенную с малой шестерней, сидящей на оси малого электродвигателя, и третьей шестерней, и контактную систему для подачи питания к электродвигателям. Стойка установлена на основании со смещением от центра, на стойке закреплена пластина, а большой двигатель установлен в центре этой пластины, при этом большая шестерня расположена на оси большого электродвигателя, а третья шестерня установлена в подшипнике на стойке и имеет маховик, причем малый двигатель установлен на пластине и несет стержень с грузами, а контактная система расположена в центре большой шестерни.
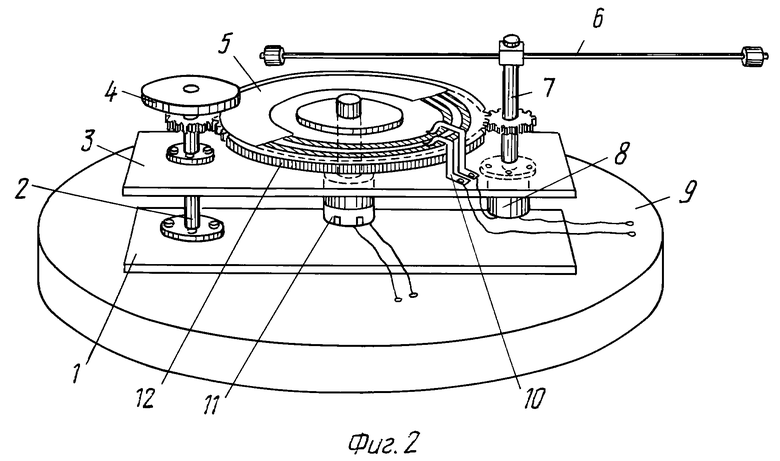
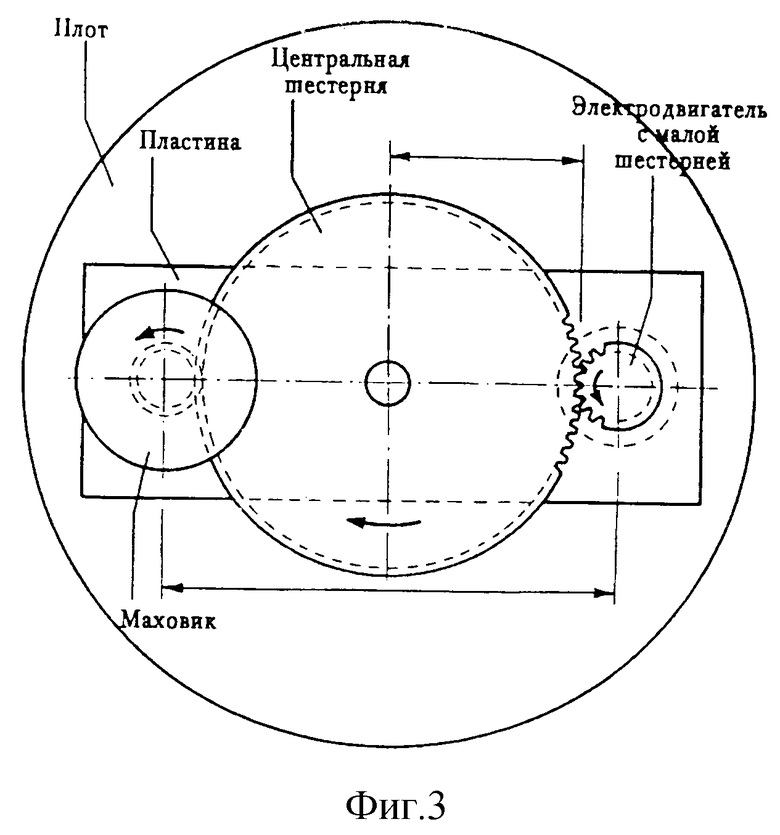
Сущность изобретения поясняется чертежами: на фиг.1 изображен общий вид средства; на фиг. 2 - другой вариант средства; на фиг. 3 - вид сверху по фиг. 1,
где 1 - основание, 2 - стойка, 3 - пластина, 4 - маховик, 5 - изолирующая лента, 6 - стержень с грузами при вращении, 7 - ось малой шестерни, 8 - стержень с грузами в статике, 9 - малый электродвигатель, 10 - плот, 11 - контакты, 12 - большой электродвигатель, 13 - большая шестерня.
Работа "Машины - Механический атом 14" осуществляется следующим образом.
Включение и отключение электродвигателя (с использованием обычного реле или какого-либо другого приспособления контактной системы) создает поступательное движение всей системе, находящейся на плавучем основании в условиях невесомости.
Когда начинает работать малый электродвигатель (9), он своей малой шестерней, опираясь о большую шестерню (13), перемещает свою правую сторону плавучего основания, а так как большая шестерня (13) соединена своей другой стороной с шестерней маховика, то эта опора дает ей усилие сдвинуть и левую сторону плавучего основания.
А поскольку этот процесс совершается одновременно, то усилие малого электродвигателя (9) создает поступательное движение на поверхности воды (в невесомости).
Когда же отключается малый электродвигатель (9), большая шестерня (13) постепенно затормаживает инерционное движение вращающихся элементов - маховика и грузов, находящихся на оси малого электродвигателя (9), что создает вновь поступательное движение в ту же сторону всей системе, находящейся на плавучем основании.
Особое внимание следует обратить на стойку (2). Ее смещение от центра создает работоспособность механизму.
Если не образована была бы "Консоль" и правую сторону пластины (3) держала бы вторая стойка, то вся система была бы "замкнута", то есть силы распределились бы поровну у центра масс с двух сторон, а в данной конструкции у центра масс плавучего основания "появилась" вторая ось, поэтому взаимодействие вращающихся элементов происходит на разных радиусах, как и показано на схеме (фиг. 3).
Иными словами, малый электродвигатель (13), находясь на краю пластины (3), имея больший рычаг, "давит" на центр, то есть на ось большого электродвигателя (12), и перемещает всю систему, находящуюся на плавучем основании.
"Машина - Механический атом 14" дает возможность рассматривать и изучать другие варианты движения механизма.
На фиг. 2 представлен вариант "Машины - Механический атом 14", где малый электродвигатель (9) имеет на оси стержень с широко расставленными грузами. Такое расположение масс создаст равную нагрузку на статор большого электродвигателя (12).
Движение машины начинается с включения большого электродвигателя. В этом варианте нужно обратить внимание на то, что статор большого электродвигателя (12) имеет нагрузку с двух сторон. С одной стороны большая шестерня (13) соединена с маховиком (4), с другой стороны - с осью малого электродвигателя (9).
Эта нагрузка дает возможность статору большого электродвигателя (12) опереться на стойку (вторую ось), где закреплена пластина, на которую действуют противоположные усилия большой шестерни (13), то есть ротора. Взаимодействия двух систем также создают поступательное движение плавучему основанию.
При отключении большого электродвигателя (12) и тормозящем движении большой шестерни (13) инерция вращения маховика (4) и инерция грузов на оси малого электродвигателя (9) создают движение плавучему основанию в направлении движения первого варианта.
Отличительные особенности "Машины - Механический атом 14":
1. Весь механизм машины размещен на пластине (4), закрепленной на одной стойке (2), смещенной от центра масс.
2. В "Машине - Механический атом 14" малый электродвигатель (9) не перемещается, как в предыдущих конструкциях, по большой статичной шестерне. Он закреплен, и расположение его создает наиболее "выгодный" импульс при рабочем моменте электродвигателя (9).
3. Вращение большой шестерни (13) и ее опора на маховик создают благоприятные условия для перемещения противоположной стороны плота.
4. Большая шестерня при отключении электродвигателей выполняет тормозящую работу. Это возможно прижатием контактов (или какое иное приспособление), что является необходимым условием в действии механизма.
Перечисленные особенности пунктов 1, 2, 3, 4 кардинально изменяют конструкцию "Машины - Механический атом", что делает ее более совершенной и работоспособной.
Средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, большую шестерню, соединенную с малой шестерней, сидящей на оси малого электродвигателя, и третьей шестерней, и контактную систему для подачи питания к электродвигателям. Стойка установлена на основании со смещением от центра, на стойке закреплена пластина, а большой двигатель установлен в центре этой пластины, при этом большая шестерня расположена на оси большого электродвигателя, а третья шестерня установлена в подшипнике на стойке и имеет маховик, причем малый двигатель установлен на пластине и несет стержень с грузами, а контактная система расположена в центре большой шестерни. Предложенное средство предназначено для изучения нетрадиционного движения в условиях плавучести. 3 ил.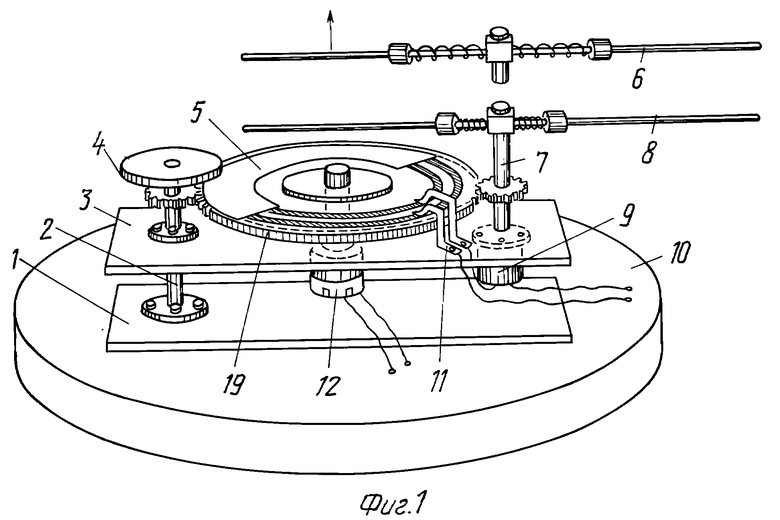
Средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, большую шестерню, соединенную с малой шестерней, сидящей на оси малого электродвигателя, и третьей шестерней, и контактную систему для подачи питания к электродвигателям, отличающееся тем, что стойка установлена на основании со смещением от центра на стойке закреплена пластина, а большой двигатель установлен в центре этой пластины, при этом большая шестерня расположена на оси большого электродвигателя, а третья шестерня установлена в подшипнике на стойке и имеет маховик, причем малый двигатель установлен на пластине и несет стержень с грузами, а контактная система расположена в центре большой шестерни.
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| RU 95121378 A1, 27.12.1997 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 7" | 1995 |
|
RU2099123C1 |
| US 3854238 A, 17.12.1974 | |||
| US 5385501 A, 31.01.1995 | |||
| JP 07016358 A, 20.01.1995. | |||
