Изобретение относится к плавающим механическим средствам (игрушкам), в частности моделям, где при погружении в среду (воду) масса приобретает невесомость, и используется в учебно-познавательном процессе.
Данная заявка является развитием к заявке 2001131067/12.
Из уровня техники для предложенного средства для передвижения в среде "Статорная машина Романова" выявлено плавучее средство того же назначения, раскрытое в описании к патенту РФ 2201276, кл. А63Н 23/14, 2003. Известное средство для передвижения в среде содержит плавучее основание, большой электродвигатель, неподвижно и со смещением от центра закрепленный на основании, малый электродвигатель и контактную систему для подачи питания.
Техническим результатом предлагаемого изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, большой электродвигатель, неподвижно и со смещением от центра закрепленный на основании, малый электродвигатель и контактную систему для подачи питания. Оно имеет дополнительные малые электродвигатели, и все малые электродвигатели расположены вокруг большого электродвигателя. При этом все электродвигатели установлены на плавучем основании неподвижно посредством установочных площадок, связанных с их статорами и с возможностью перестановки по поверхности плавучего основания. Роторы малых электродвигателей имеют возможность вращения против часовой стрелки, а ротор большого электродвигателя имеет возможность вращения по часовой стрелке.
На плавучем основании подвижные элементы, представляющие собой малые электродвигатели, расположены по краю плавучего основания. Каждый из двигателей соединен с установочной площадкой, что дает электродвигателям возможность перемещаться и стоять в разных точках на площади плавучего основания.
В центре плавучего основания размещена колодка, соединяющая электропровода питания электродвигателей.
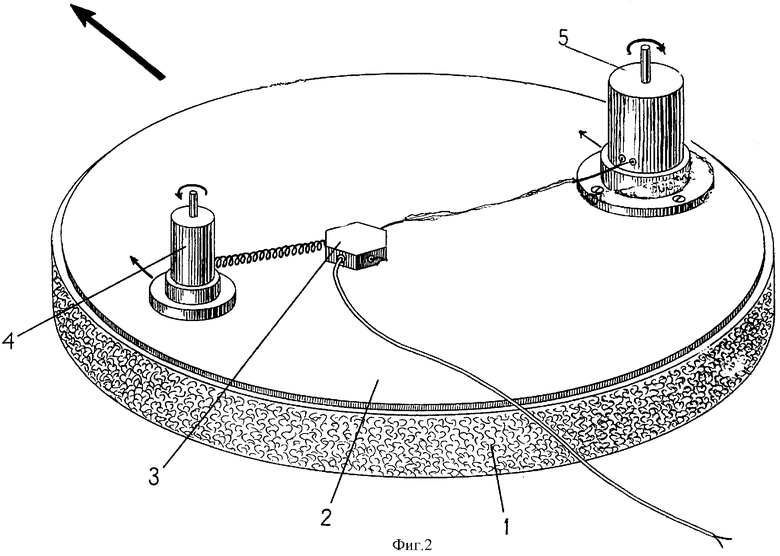
На фиг.1 изображено:
1 - плавучее основание;
2 - пластина;
3 - колодка, соединяющая электропровода питания электродвигателей;
4 - малые электродвигатели (количество электродвигателей может быть больше или меньше 4);
5 - большой электродвигатель.
Как видно на фиг.1, на плавучем основании расположены малые электродвигатели 4, каждый из них имеет установочную площадку, что дает возможность перемещать их от центра плавучего основания к его краю, увеличивая или уменьшая их действие. Так как все перечисленные электродвигатели имеют вращение ротора против часовой стрелки, то их статоры, стоящие на плавучем основании, могут создавать усилие на плавучее основание, вращая его вокруг центра масс по направлению часовой стрелки.
Около центра плавучего основания, со смещением вправо, расположен большой электродвигатель. Его ротор вращается по часовой стрелке, и если отключить все малые электродвигатели и оставить только вращение ротора большого электродвигателя, то плавучее основание от усилия его статора будет перемещаться с большим креном в левую сторону.
Но если при этом включить малые электродвигатели, то усилия их статоров на плавучее основание изменят его направление перемещения и придадут ему однонаправленное движение.
Таким образом, движение плавучего основания возникает вследствие противоположных действий статоров малых электродвигателей и статора большого электродвигателя. Причем усилие статоров возникают от вращения роторов, которые являются опорой для статоров.
Как указано выше, малые электродвигатели, закрепленные на индивидуальных площадках, дают возможность перемещать их от края плавучего основания к центру. Их перемещение является своеобразным "регулятором" действия статора большого электродвигателя.
Если малые электродвигатели находятся на самом краю плавучего основания, их статоры дают наибольшее сопротивление статору большого электродвигателя и этим самым могут уничтожить его действие.
И наоборот, если малые электродвигатели приблизить к центру плавучего основания, действия их статоров не смогут дать нужного сопротивления по отношению действий статора большого электродвигателя.
Переставляя малые электродвигатели, можно найти на площади плавучего основания наиболее эффективные точки положения, по отношению усилия статора большого электродвигателя, что и придает однонаправленное поступательное движение плавучему основанию.
При этом в целях совершенствования учебно-познавательного процесса можно было бы использовать в электросети малых электродвигателей регулирующие сопротивления, но следует отметить, что перестановка электродвигателей нагляднее показывает действие статоров малых электродвигателей.
То есть наглядно показано, что вращающиеся роторы являются только опорой для статоров и действие статоров малых электродвигателей связано непосредственно с центром плавучего основания, а вращение ротора и усилие статора большого электродвигателя осуществляется относительно точки, смещенной от центра плавучего основания. Если бы большой электродвигатель находился в центре плавучего основания, то никакого линейного смещения последнего от действия статора большого электродвигателя не происходило бы, максимум что плавучее основание начнет вращаться вокруг его центра масс.
Как сказано ранее в описании заявки: «Количество электродвигателей может быть больше или меньше».
Однонаправленное движение от ротора и статора электродвигателей можно увидеть и в других примерах.
На фиг.2 электродвигатели расположены на краях противоположных радиусов плавучего основания.
Большой электродвигатель закреплен на правой стороне плавучего основания. Малый на краю левой стороны.
Если включить питание только одному большому электродвигателю, то плавучее основание под действием статора (при этом ротор его будет вращаться по направлению часовой стрелки) начнет вращаться вокруг центра масс. Но если включить питание малому электродвигателю (где его ротор будет вращаться против часовой стрелки), плавучее основание под действием статора малого электродвигателя получит однонаправленное движение.
Это объясняется тем, что малый электродвигатель усилием своего статора затормаживает вращение плавучего основания.
Однако действие статора большого электродвигателя остается прежним, но усилие статора малого электродвигателя затормаживает вращение плавучего основания только с определенным усилием.
Если бы усилие статора малого электродвигателя было бы не достаточным, то плавучее основание перемещалось бы с креном в левую сторону. И наоборот, с излишним усилием плавучее основание перемещалось бы с креном в правую сторону. Только определенное соотношение усилий статоров может создать однонаправленное движение плавучему основанию.
Таким образом, в этом примере взаимодействие двух статоров большого и малого электродвигателей превращает вращательное движение плавучего основания в прямолинейное (поступательное).
Изобретение относится к плавающим механическим игрушкам и может быть использовано в учебно-познавательном процессе. Средство для передвижения в среде содержит плавучее основание, большой электродвигатель, неподвижно и со смещением от центра закрепленный на основании, малый электродвигатель и контактную систему для подачи питания, при этом средство имеет дополнительные малые электродвигатели. Все малые электродвигатели расположены вокруг большого электродвигателя, причем все электродвигатели установлены на плавучем основании неподвижно посредством установочных площадок, связанных с их статорами и с возможностью перестановки по поверхности плавучего основания. Роторы малых электродвигателей имеют возможность вращения против часовой стрелки, а ротор большого электродвигателя имеет возможность вращения по часовой стрелке. Средство для передвижения в среде позволяет изучать нетрадиционное движение в условиях плавучести. 2 ил.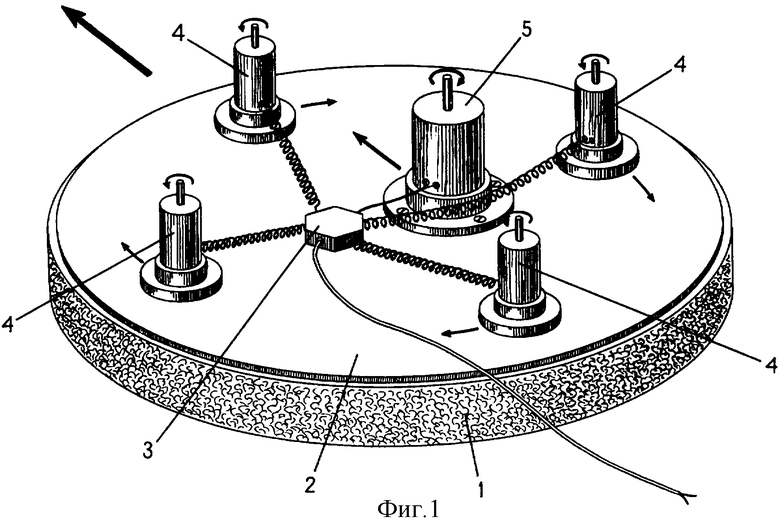
Средство для передвижения в среде, содержащее плавучее основание, большой электродвигатель, неподвижно и со смещением от центра, закрепленный на основании малый электродвигатель, и контактную систему для подачи питания, отличающееся тем, что оно имеет дополнительные малые электродвигатели, и все малые электродвигатели расположены вокруг большого электродвигателя, при этом все электродвигатели установлены на плавучем основании неподвижно посредством установочных площадок, связанных с их статорами и с возможностью перестановки по поверхности плавучего основания, и роторы малых электродвигателей имеют возможность вращения против часовой стрелки, а ротор большого электродвигателя имеет возможность вращения по часовой стрелке.
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 17" | 2001 |
|
RU2201276C1 |
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| RU 95121378 A, 27.12.1997 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 7" | 1995 |
|
RU2099123C1 |
| US 3854238 А, 17.12.1974 | |||
| US 5385501 А, 31.01.1995 | |||
| JP 7016358 А, 20.01.1995. | |||

