Изобретение относится к плавающим механическим средствам, где при погружении в среду (воду) масса приобретает невесомость.
Аналогом изобретения в жидкой среде является плавучее основание, установленные на основании подвижные элементы относительно основания (Авторское свид. СССР 1186228, кл. А 63 Н 23/24, 1995 г.).
Данное устройство имеет оригинальную кинематическую схему перемещения приводных элементов.
Однако это устройство относится к моделям традиционной техники.
Из уровня техники для предложенной машины выявлено средство того же назначения, раскрытое в описании к патенту РФ, 2031685, кл. А 63 Н 23/10, 1995. Средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, жестко установленную на стойке большую шестерню, планку, несущую на себе малый электродвигатель, и уравновешивающий груз, большой электродвигатель, неподвижно закрепленный на основании, шестерню большого электродвигателя и контактную систему для подачи питания.
Техническим результатом от предлагаемого изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, жестко установленную на стойке большую шестерню, планку, несущую на себе малый электродвигатель и уравновешивающий груз, большой электродвигатель, неподвижно закрепленный на основании, шестерню большого электродвигателя и контактную систему для подачи питания, при этом имеет дифференциал, на котором расположена планка, а шестерня большого электродвигателя входит в зацепление с нижней шестерней дифференциала, при этом контактная система имеет контакты для каждого электродвигателя, расположенные на большой шестерне и обеспечивающие подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o.
Стойка установлена в центре плавучего основания, на которой закреплен дифференциал и большая шестерня, на верхней шестерне дифференциала расположена планка, имеющая с одной стороны малый электродвигатель и с другой стороны уравновешивающий груз, большой электродвигатель соединен своей шестерней с дифференциалом - с его нижней шестерней и тем самым соединен с малым электродвигателем, а контактная система расположена в центре большой шестерни.
Сущность изобретения поясняется чертежом, где изображен общий вид средства.
1. Основание;
2. Плот;
3. Большой электродвигатель;
4. Пластина;
5. Большая шестерня;
6. Малый электродвигатель;
7. Планка;
8. Дифференциал;
9. Контактная система;
10. Уравновешивающий груз;
11. Шестерня дифференциала
Работа "Машины Романова-Механический атом 17" осуществляется следующим образом.
Как видно на чертеже, в Машине действуют два электродвигателя. Малый электродвигатель 6 перемещается по большой шестерне 5. Большой электродвигатель статичен и закреплен на несущей пластине 4.
Рассматривая работу электродвигателей, нужно обратить внимание на два условия.
Первое: электродвигатели включаются поочередно, и второе: электродвигатели включаются в определенных местах окружности.
Рассмотрим первый цикл - работу малого электродвигателя - 6.
В точке "А" происходит включение электродвигателя 6. Находясь на планке 7, закрепленной на шестерне дифференциала 11, электродвигатель 6 перемещается по большой шестерне 5 (по часовой стрелке). На этом участке полуокружности малый электродвигатель 6 своей малой шестерней опирается на зубья большой шестерни 5, тем самым толкая в противоположную сторону большую шестерню 5, закрепленную на плавучем основании 2.
Таким образом, усилие малой шестерни передается непосредственно на плавучее основание 2.
Это усилие малого электродвигателя 6 и сцепление малой шестерни с большой шестерней 5 должно было бы вращать всю систему вместе с плавучим основанием. Но этого не может происходить, так как планка с электродвигателем 6 опирается о блок шестерен дифференциала. (Надо помнить, что в это время большой электродвигатель 3 не работает).
Этот шестеренчатый блок дифференциала противодействует вращательному движению всей системы, что и создает условия малой шестерне перемещать прямолинейно плавучее основание 2.
Малый электродвигатель 6, дойдя до точки "а" отключается. При этом возникает "пауза". Происходит замедление движения вращающихся элементов на отрезке "а" и "В".
В точке "В" включается большой электродвигатель 3.
Работа большого электродвигателя 3 существенно отличается от действий малого электродвигателя 6.
Большой электродвигатель 3 своей шестерней передает усилие через вертикальную шестерню дифференциалам 8 на малую шестерню электродвигателя 6 (малый электродвигатель 6 теперь не работает) и перемещает ее по большой шестерне 5, толкая ("таща") ее, и тем самым перемещая всю систему в ту же сторону, в какую ранее перемещал малый электродвигатель 6.
И в этом цикле также шестеренчатый блок дифференциала 8 стабилизирует всю систему, противодействуя вращательному движению плавучего основания.
Подведя малую шестерню к точке "в" большой электродвигатель 3 отключается. И вновь на отрезке "в" и "А" происходит замедленное движение вращающихся элементов.
Подведя малую шестерню к точке "А", совершается следующий цикл.
Эффект однонаправленного поступательного движения плавучего основания зависит от подачи соответствующей энергии.
Если в первом цикле малый электродвигатель 6 совершал движение по большой шестерне 5, на большом радиусе, что облегчало ему движение, то во втором цикле большой электродвигатель 3 перемещает малую шестерню по большой шестерне 5 на большом радиусе, что требует большей энергии.
Ускоренное вращение элементов может иметь отрицательный эффект. Появится инерция вращающихся элементов, что может нарушить сам принцип, природу возникновения данного явления, поэтому контактная система имеет контакты для каждого электродвигателя, расположенные в центре большой шестерни 5, обеспечивающие подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o.
Изобретение относится к научно-познавательным средствам и содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, жестко установленную на стойке большую шестерню, планку, несущую на себе малый электродвигатель и уравновешивающий груз, большой электродвигатель, неподвижно закрепленный на основании, шестерню большого электродвигателя и контактную систему для подачи питания, при этом оно имеет дифференциал, на котором расположена планка, а шестерня большого электродвигателя входит в зацепление с нижней шестерней дифференциала, при этом контактная система имеет контакты для каждого электродвигателя, расположенные на большей шестерне и обеспечивающие подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o. Предложенное средство предназначено для изучения нетрадиционного движения в условиях плавучести. 1 ил.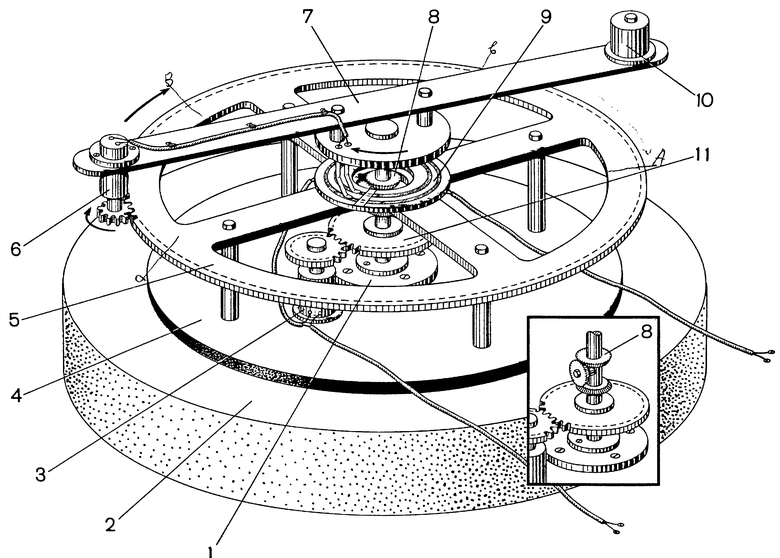
Средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий стойку, жестко установленную на стойке большую шестерню, планку, несущую на себе малый электродвигатель и уравновешивающий груз, большой электродвигатель, неподвижно закрепленный на основании, шестерню большого электродвигателя, и контактную систему для подачи питания, отличающееся тем, что имеет дифференциал, на котором расположена планка, а шестерня большого электродвигателя входит в зацепление с нижней шестерней дифференциала, при этом контактная система имеет контакты для каждого электродвигателя, расположенные на большей шестерне и обеспечивающие подачу электроэнергии к каждому из двигателей попеременно на дугах, меньших 180o.
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| RU 95121378 A1, 27.12.1997 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 7" | 1995 |
|
RU2099123C1 |
| US 3854238 А, 17.12.1974 | |||
| US 5385501 A, 31.01.1995 | |||
| JP 07016358 A, 20.01.1995. | |||

