Изобретение относится к плавающим механическим средствам, где при погружении в среду (воду) масса приобретает невесомость.
Аналогом изобретения в жидкой среде является плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания (авт.свид. СССР N 1186228, кл. A 63 H 23/24, 1995).
Данное устройство имеет оригинальную кинематическую схему перемещения приводных элементов. Однако это устройство относится к моделям традиционной техники.
Можно также упомянуть созданное автором изобретение, средство "Машина Романова - механический атом 5", где в механической модели, содержащей плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, подвижные элементы выполнены в виде шарнирно установленной на оси жестко связанные с основанием планки, несущей на одном конце вращаемый узел с малой шестеренкой, а на другом конце - уравновешивающий груз, механизм перемещения элементов выполнен в виде закрепленного на основании электродвигателя с контактной шестерней посредством жестко связанной с основанием и установленной соосно оси планки большой шестерни, а также связанное своим валом с малой шестерней электродвигателя вращаемого узла систем коммутации обоих электродвигателей и их питания, причем система коммутации содержит средства для включения электродвигателя с контактной шестерней при перемещении вращаемого узла по дуге большой шестерни, ближайшей к валу этого электродвигателя, и отключения электродвигателя в других фазах перемещения вращаемого узла по большой шестерне.
Средство для передвижения в среде, раскрытое в описании к патенту РФ 2031685, является по совокупности существенных признаков наиболее близким аналогом предложенного изобретения и содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий расположенную на стойке горизонтально большую шестерню, в центре которой вставлена в подшипник средняя шестерня, на которой закреплена планка, несущая на себе на одном конце электродвигатель, соединенный малой шестерней с большей шестерней, а на другом - уравновешивающий груз, и контактную систему, подающую питание к электродвигателю.
Техническим результатом предлагаемого изобретения является изучение нетрадиционного движения в условиях плавучести, где основным фактором в перемещении механизма является невесомость (на воде).
Указанный технический результат достигается тем, что средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий расположенную на стойке горизонтально большую шестерню, в центре которой вставлена в подшипник средняя шестерня, на которой закреплена планка, несущая на себе на одном конце электродвигатель, соединенный малой шестерней с большей шестерней, а на другом - уравновешивающий груз, и контактную систему, подающую питание к электродвигателю, по изобретению средство для передвижения в среде имеет платформу, стойка установлена на платформе со смещением от центра, а на большей шестерне на некотором расстоянии от центра закреплена ось, на которой размещен маховик с шестерней, входящей в соединение со средней шестерней, при этом контактная система расположена в центре большей шестерни.
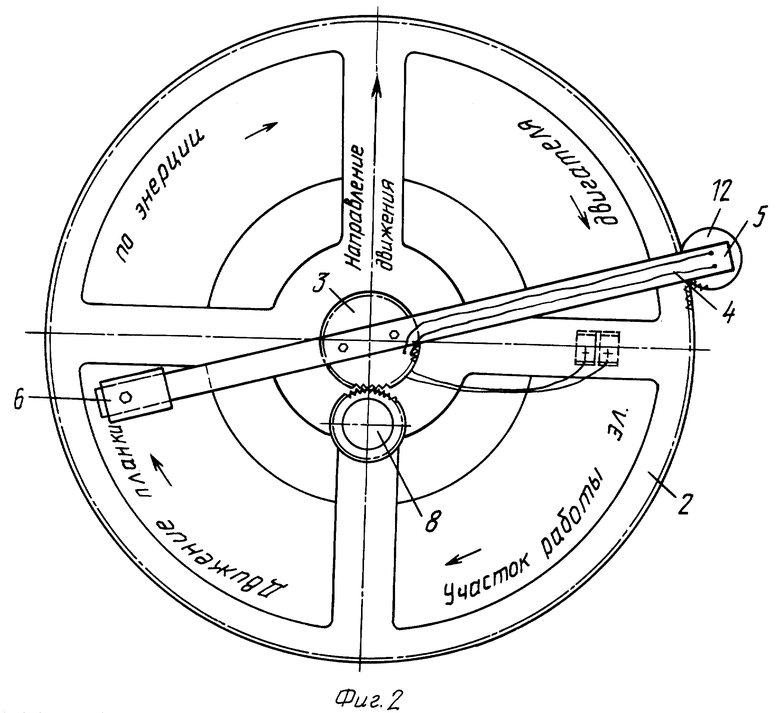
Сущность изобретения поясняется чертежами, где изображено на:
фиг. 1 - общий вид средства;
фиг. 2 - вид сверху.
На фигурах обозначены:
1. Платформа
2. Большая шестерня
3. Средняя шестерня
4. Планка
5. Электродвигатель
6. Уравновешивающий груз
7. Маховик
8. Шестеренка маховика
9. Контактная система
10. Батарея
11. Плавучее основание
12. Малая шестерня
13. Стойка
Работа "Машины Романова - механический атом 10" осуществляется следующим образом.
Последовательное чередование включения и отключения электродвигателя 5, идущего по большой шестерне 2, создает поступательное движение платформе 1.
На фиг. 2 показаны участки, где происходит включение и отключение электродвигателя 5.
Следует обратить внимание на расположение маховика 7 и исходное положение планки 4 с электродвигателем 5.
Как видно на фиг. 2, маховик 7 находится внизу от центра, планка 4 c электродвигателем 5 располагается несколько выше горизонтальной линии большой шестерни 2.
В дальнейшем будет понятно, что это расположение планки 4 и маховика 7 выбрано не случайно. Когда включается электродвигатель 5, его малая шестерня, двигаясь по большой шестерне 2, перемещает планку 4 с электродвигателем 5 и тем самым вращает маховик 7, поскольку его шестерня соединена со средней шестерней 3.
Дойдя до самой крайней нижней точки большой шестерни 2, электродвигатель 5 отключается и весь последующий путь вращающиеся элементы совершают по инерции до начального исходного положения планки 4.
Рассмотрим, что же происходит за этот один рабочий цикл.
Прежде всего нужно понять, что в механизме взаимодействуют две системы. Одна - это платформа 1, большая шестерня 2 с осью и маховиком 7. Другая система - это планка 4 со средней шестерней 3 и электродвигателем 5.
Когда электродвигатель 5 включается в сеть, он давит своей шестеренкой на зубья большой шестерни 2, толкая ее от себя в противоположную сторону. А так как большая шестерня 2 жестко закреплена на платформе 1, то это уже усилие получает и платформа 1. Плавучее основание 11 приходит в движение.
Итак, электродвигатель 5, толкая своей малой шестеренкой большую шестерню 2, сам перемещается вместе с планкой 4 в противоположную сторону. А так как планка 4 соединена со средней шестерней 3, то ее усилие передается на шестерню маховика 8, а значит и на ось, стоящую на большей шестерне 2.
Таким образом, работа электродвигателя 5 создает два противоположных усилия: давит своей малой шестеренкой на большую шестерню 2, от которого платформа 1 должна бы вращаться, но давление средней шестерни 3 на ось маховика 4 удерживает платформу 1 от вращения. И несмотря на ее потенциальное вращение, она вынуждена занять статическое положение. И в этих условиях зубья малой шестеренки заставляют большую шестерню 2 уже не вращаться, а перемещаться прямолинейно, создавая поступательное движение платформе 1.
Следует заметить, как видно на фиг. 2, включение электродвигателя 5 происходит в момент, когда его положение находится перпендикулярно по отношению расположения маховика 4. Экспериментально обнаружено, что это расположение двух взаимодействующих систем в момент включения электродвигателя наиболее выгодно для реализации поступательного движения платформы.
Что же происходит, когда отключается электродвигатель 5.
В период работы электродвигателя 5, как мы уже знаем, средняя шестерня 3 "раскручивала" маховик 7. При отключении электродвигателя 5 накопленная, аккумулированная кинетическая энергия маховиком 4, теперь отдается вращающимся элементам. И это инерционное движение также "работает" на поступательное движение всей системы.
Маховик 7 при вращении, опираясь о среднюю шестерню 3, перемещает правую сторону платформы 1, а малая шестеренка теперь давит на зубья большой шестерни 2 "впереди себя", перемещая левую сторону. Суммируя эти действия, в результате платформа 1 перемещается в том же первоначальном направлении, а тормозящее движение постепенно приводит планку к прежнему положению, откуда и совершается следующий цикл.
Каждый цикл начинается с нуля или с минимального движения, так как инертность маховика 7 и является опорой для малой шестеренки при совершении ее усилия на большую шестерню 2.
Таким образом, каждый рабочий момент чередуется с участием торможения (когда отключается электродвигатель). Оно возникает вследствие трения малой шестеренки о большую шестерню 2. (В промышленном изготовлении могут быть более совершенные конструктивные решения торможения). Важно, чтобы работа электродвигателя 5 начиналась с нуля или с малых оборотов.
Инерция на этом этапе пагубна, так как опорой для электродвигателя 5 является инертная масса маховика 7.
Такое взаимодействие вращающихся элементов, создающих поступательное движение, возможно только в условиях невесомости на воде (в среде), так как в работе участвуют не только вращающиеся элементы, находящиеся на платформе 1, но участвует также и сама платформа 1.
Как уже сказано в предыдущих заявках ("Машины Романова - механический атом 5" и "7"), если бы мы просто поставили плавучее основание на стол, мы не увидели бы реакций от усилия малой шестеренки на большую шестерню 2, а также результат усилия средней шестерни 3 на маховик 7.
Только усилия водной среды (имитация невесомости) вносит сложные взаимодействия в этот механизм, ибо здесь взаимодействуют не только "видимые" подвижные элементы, а участвует в этом процессе само плавучее основание.
Новое конструктивное решение "Машины Романова - механический атом 10" выгодно отличается от предыдущих моделей ("Машины Романова 5" и "7") своей простотой и экономичностью в конструкции.
Существенные изменения, отличающие изобретение "Машину Романова - механический атом 10" от его аналогов ("Машины Романова - механический атом 5" и "7").
1. Вся система вращающихся элементов размещена на одной стойке
2. Работа всех вращающихся элементов совершается от одного электродвигателя (эксперименты показали, нет необходимости в работе большого электродвигателя, действующего в "Машине Романова - механический атом 5"), что дает данному изобретению большую экономичность в энергии.
3. И самое главное, упорядочена работа электродвигателя, то есть найдены моменты включения и отключения электродвигателя при данном расположении на окружность маховика.
Предыдущие патенты "Машины Романова - механический атом 5" и "7" не имеют технических условий, описанных выше в пунктах 1, 2 и 3, поэтому их поступательное движение менее эффективно.
Машина Романова - механический атом 10 представляет собой средство для передвижения в среде для изучения нетрадиционного движения в условиях плавучести и содержит плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий расположенную на стойке горизонтально большую шестерню, в центре которой вставлена в подшипник средняя шестерня, на которой закреплена планка, несущая на себе на одном конце электродвигатель, соединенный малой шестерней с большей шестерней, а на другом - уравновешивающий груз, и контактную систему, подающую питание к электродвигателю. Средство для передвижения в среде имеет платформу, стойка установлена на платформе со смещением от центра, а на большей шестерне на некотором расстоянии от центра закреплена ось, на которой размещен маховик с шестерней, входящей в соединение со средней шестерней, при этом контактная система расположена в центре большей шестерни. 2 ил.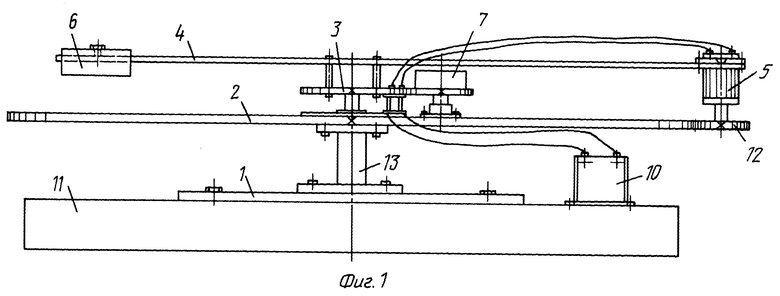
Средство для передвижения в среде, содержащее плавучее основание, установленные на основании подвижные элементы и механизм перемещения элементов относительно основания, включающий расположенную на стойке горизонтально большую шестерню, в центре которой вставлена в подшипник средняя шестерня, на которой закреплена планка, несущая на себе на одном конце электродвигатель, соединенный малой шестерней с большей шестерней, а на другом - уравновешивающий груз, и контактную систему, подающую питание к электродвигателю, отличающееся тем, что средство для передвижения в среде имеет платформу, стойка установлена на платформе со смещением от центра, а на большей шестерне на некотором расстоянии от центра закреплена ось, на которой размещен маховик с шестерней, входящей в соединение со средней шестерней, при этом контактная система, расположена в центре большей шестерни.
| ДЕМОНСТРАЦИОННАЯ МОДЕЛЬ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ЖИДКОЙ ПОВЕРХНОСТИ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ" | 1990 |
|
RU2031685C1 |
| RU 95121378 A1, 27.12.97 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ В СРЕДЕ "МАШИНА РОМАНОВА-МЕХАНИЧЕСКИЙ АТОМ 7" | 1995 |
|
RU2099123C1 |
