Изобретение относится к способу регулирования исполнительной системы, работающей с трением, базирующему на формировании сигнала регулирования исполнительной системой.
Известен способ регулирования исполнительной системы, работающей с трением, основанный на формировании сигнала регулирования исполнительной системы, величина которого определяется величиной отклонения регулирования [1]
Известен также оптимальный по быстродействию регулятор. Такой регулятор положения (позиционный регулятор) имеет в качестве нелинейного усилительного звена выведенный от оптимального по быстродействию корневой годограф с линейной областью для малых отклонений регулирования для исключения граничных циклов. Обусловленное требуемой динамикой малого сигнала высокое усиление создает вместе с шумом сенсорного и аналого-цифрового преобразователей в переходном режиме недопустимо высокую нагрузку системы и выделение шума [2]
В основу изобретения положена задача создать способ регулирования исполнительной системы, работающей с трением, приводящий в соединении с оптимизированной по быстродействию характеристикой большого сигнала и хорошей характеристикой малого сигнала и сигнала помехи к малой нагрузке системы, в частности к малой нестабильности положения в заданном положении.
Поставленная задача решается за счет того, что согласно заявляемому способу формируют такие значения сигнала регулирования исполнительной системы, определенные нелинейной характеристикой регулятора, при которых исполнительная система, преодолевая трение, приходит в состояние движения при превышении величины регулирования заданного значения или в состояние покоя при других ее значениях, образуя первую целевую область регулирования, в которой энергия движения исполнительной системы может быть поглощена.
При предложенном способе преимущественно в нелинейной характеристике регулятора формируют вторую и третью области разной крутизны, причем крутизна второй области этой характеристики меньше, чем крутизна третьей области.
Также предпочтительным является то, что регулятор имеет интегральную составляющую.
Согласно предпочтительному примеру осуществления способа по изобретению коэффициент интегрирования регулятора изменяют в зависимости от отклонения регулируемого параметра.
Способ согласно изобретению пригоден для регулирования любой исполнительной системы, работающей с трением. Перестановка регулировочного штока дизельного топливного насоса и перестановка ходового механизма автомашины называются лишь в качестве примера, иллюстрирующего заявленный способ.
Приведенные примеры осуществления способа согласно изобретению не должны ограничивать его объем.
На фиг. 1 приведена структурная схема системы регулирования с исполнительной системой, работающей с трением; на фиг.2 нелинейная характеристика регулятора положения; на фиг.3 функциональная зависимость между интегральной составляющей и отклонением регулирования.
Система регулирования, показанная на фиг.1, регулирует выходную величину Xi, соответствующую фактической величине положения исполнительной системы 1, работающей с трением, в зависимости от задаваемой заданной величины положения Xs. Формирователь разности 2 определяет на основании заданной величины положения Xs и фактической величины положения Xi отклонение регулирования Δx, подводимое к регулятору положения 3. Регулятор положения 3 содержит часть 4 с нелинейной характеристикой, а также часть 5 с интегральной составляющей. Выходы частей 4 и 5 суммируются в сумматоре 6 и затем подводятся в качестве входного параметра Ns, Vs к исполнительной системе 1.
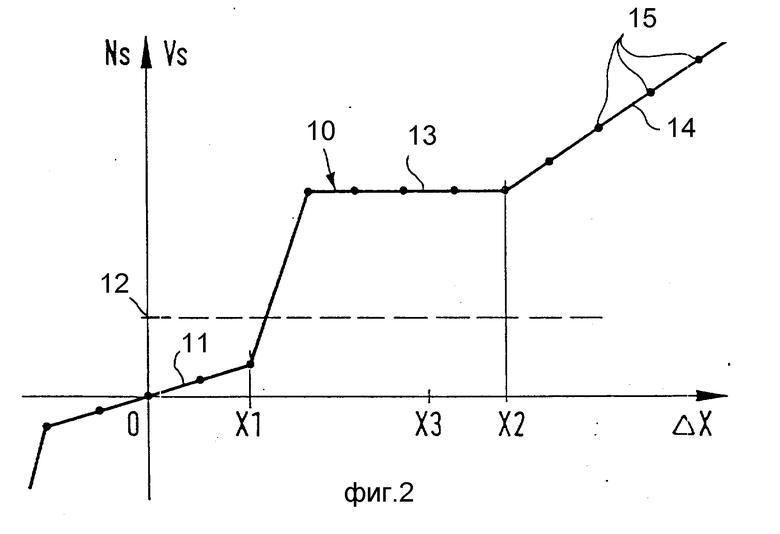
На фиг. 2 показана нелинейная характеристика 10, содержащаяся в части 4 фиг. 1. Нелинейная характеристика 10 составляет функциональную зависимость между отклонением регулирования Δx и входным параметром Ns, Vs исполнительной системы 1, работающей с трением. Характеристика 10 составлена по меньшей мере из трех участков. Малые отклонения регулированияΔx располагаются внутри целевой области  . В целевой области 11 величина параметра Ns, Vs расположена ниже величины 12, соответствующей моменту трения или силе трения исполнительной системы 1, работающей с трением. Эта граница изображена на фиг. 2 штриховой линией. К целевой области 11 примыкает вторая область
. В целевой области 11 величина параметра Ns, Vs расположена ниже величины 12, соответствующей моменту трения или силе трения исполнительной системы 1, работающей с трением. Эта граница изображена на фиг. 2 штриховой линией. К целевой области 11 примыкает вторая область  . Значения величин Ns, Vs лежат выше границы 12 момента трения или силы трения. Характеристика имеет в этой области меньшую крутизну, чем в третьей области 14, примыкающей сюда в направлении больших отклонений регулирования
. Значения величин Ns, Vs лежат выше границы 12 момента трения или силы трения. Характеристика имеет в этой области меньшую крутизну, чем в третьей области 14, примыкающей сюда в направлении больших отклонений регулирования  . Область
. Область  может быть обозначена как область малого сигнала, а область
может быть обозначена как область малого сигнала, а область  как область большого сигнала. Поскольку регулятор 3 реализован как математическое обеспечение в компьютере, то вместо непрерывной характеристики 10 имеются дискретные значения 15.
как область большого сигнала. Поскольку регулятор 3 реализован как математическое обеспечение в компьютере, то вместо непрерывной характеристики 10 имеются дискретные значения 15.
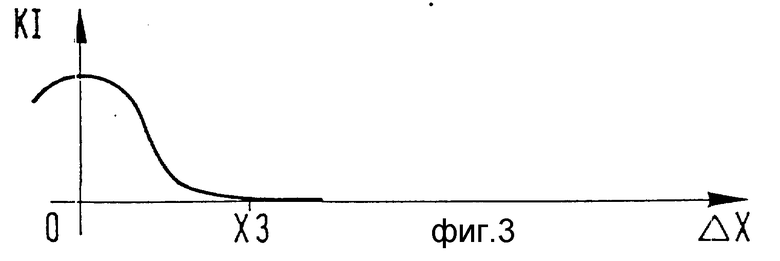
На фиг. 3 показана функциональная зависимость между отклонением регулирования Δx и коэффициентом интегрирования K1 интегральной составляющей, содержащейся в части 5 регулятора 3 (фиг.1). Коэффициент интегрирования K1 соответствует обратной величине временной константы Т1 интегратора. Коэффициент интегрирования K1 зависит от отклонения регулирования Δx. Ниже задаваемой границы  возрастает K1 до определенной величины и при отклонении регулирования
возрастает K1 до определенной величины и при отклонении регулирования  приходит к нулю.
приходит к нулю.
Способ согласно изобретению более подробно описывается с помощью фиг.1 и 2.
Изображенная на фиг.1 система регулирования содержит исполнительную систему 1, работающую с трением.
Величиной регулирования Xi является положение, которое при отклонении регулирования Δx за минимально возможное время должно стать равным новой заданной величине Xs. Речь может идти как о вращательных, так и о поступательных движущихся исполнительных системах. Входной параметр вращательной системы 1, например, представляет собой задание определенного установленного числа оборотов Ns, входной параметр поступательно движущейся системы 1 задание скорости перемещения Vs. Неописанными более подробно подчиненными контурами регулирования в случае вращательных систем являются, например, дифференциальные регуляторы числа оборотов и тока для приводного двигателя.
Согласно фиг. 2, в зависимости от отклонения регулирования Δx определяют величину для параметра Ns, Vs с помощью заданной нелинейной характеристики 10. Существенным для изобретения является установление нелинейной характеристики 10 таким образом, чтобы величина параметра Ns, Vs при лежащем вне задаваемой целевой области 11 отклонении регулирования Δx давала вращающий момент или усилие, что является достаточным для вырывания исполнительной системы 1 из момента сцепления, и чтобы энергия движения исполнительной системы 1 могла поглощаться в целевой области 11. Для этого требуется лишь знание момента трения или силы трения исполнительной системы 1, который(ая) может определятся, например, экспериментальным путем. На фиг.2 эта величина 12 показана штриховой линией. Величины для Ns, Vs внутри целевой области 11 находятся ниже величины 12. Поскольку в регуляторе положения 3 не предусмотрена интегральная составляющая, характеристика 10 в целевой области 11 не имеет крутизны. С помощью этого мероприятия система регулирования полностью успокаивается внутри целевой области 11 и энергия не расходуется.
Во второй и в третьей областях 13, 14 величина параметра Ns, Vs назначена такой, что энергия движения исполнительной системы может полностью поглощаться внутри целевой области 11. Нелинейная характеристика 10 может иметь во второй области 13 нулевую крутизну или крутизну с задаваемой величиной. Преимущественно крутизна во второй области 13 постоянно меньше, чем крутизна в третьей области 14. С помощью этого мероприятия создается диапазон торможения для исполнительной системы 1, обеспечивающей своевременное торможение, если система 1 от третьей области 14, соответствующей работе с большим сигналом, стремится к меньшим отклонениям регулирования Δx. Без предварительного уменьшения крутизны третьей области 14 во второй области 13 имелась бы опасность перерегулирования.
Статическая нелинейная характеристика 10 регулятора положения 3 может быть дополнена частью 5 (фиг.1), содержащей интегральную составляющую. Интегральная составляющая повышает стационарную точность. Особенно предпочтительным является мероприятие по заданию интегральной составляющей в зависимости от отклонения регулирования Δx. Взаимосвязь между отклонением регулирования Δx и коэффициентом K1 интегральной составляющей показана на фиг.3. Коэффициент K1 является обратной величиной временной константы Т1 интегратора. Характеристика преимущественно установлена таким образом, что максимальная величина K1 получается при отклонении регулирования Δx, равном нулю, и выше задаваемой величины  отклонения регулирования Δx приходит к нулю. Граничная величина X3 находится, например, в зоне малого сигнала
отклонения регулирования Δx приходит к нулю. Граничная величина X3 находится, например, в зоне малого сигнала  . Первое возможное положение величины
. Первое возможное положение величины  приведено в качестве примера на фиг. 2. Однако величина
приведено в качестве примера на фиг. 2. Однако величина  также может лежать в начале третьей области 14, соответствующей работе с большим сигналом. Уменьшенная в этой области до нуля интегральная составляющая предупреждает ненужное интегрирование до больших величин Ns, Vs при больших отклонениях регулирования Δx.
также может лежать в начале третьей области 14, соответствующей работе с большим сигналом. Уменьшенная в этой области до нуля интегральная составляющая предупреждает ненужное интегрирование до больших величин Ns, Vs при больших отклонениях регулирования Δx.
Сумматор 6, который только и требуется в том случае, если предусмотрена часть 5, суммирует выходные величины 4 и 5 и выдает величины для параметра Ns, Vs в качестве входных величин на исполнительную систему 1.
Весь регулятор положения 3 содержит, следовательно, лишь две характеристики интегрирование и суммирование, и за счет этого для него требуется лишь незначительное время расчета в том случае, если способ реализован в компьютере. Если отказываться от интегральной составляющей, отпадает одна характеристика интегрирование и суммирование.
Способ согласно изобретению пригоден для регулирования всех исполнительных систем 1, работающих с трением. В качестве примера таких исполнительных систем здесь приводятся регулировочный шток топливного насоса для дизельного топлива и регулирование ходового механизма транспортного средства.
Литература
1. Патент США N 2410289, кл. 318-619, 1946.
2. Справочник "Einfuhrung in die Regelungstechnik". Статья Леонхарда "Zeitophmaler Regler".
Изобретение относится к автоматике. Технический результат заключается в повышении точности регулирования, который достигается за счет того, что способ регулирования исполнительной системы, работающей с трением, основан на формировании сигнала регулирования исполнительной системы, величина которого определяется величиной отклонения регулирования. При этом формируют такие значения сигнала регулирования исполнительной системы, определенные нелинейной характеристикой регулятора, при которых исполнительная система, преодолевая трения, приходит в состояние движения при превышении величины регулирования заданного значения или в состояние покоя при других ее значениях, образуя первую целевую область регулирования, в которой энергия движения исполнительной системы может быть поглощена. 3 з. п. ф-лы, 3 ил.
| US, патент, 2410289, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |

