Уровень техники
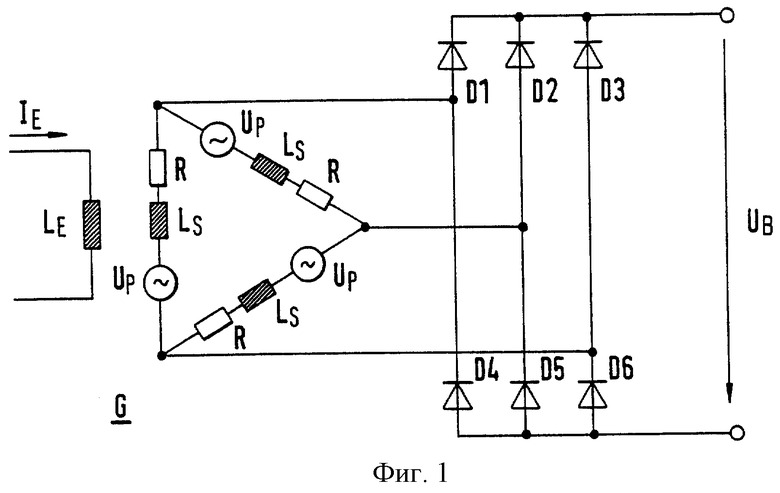
В настоящее время в транспортных средствах в качестве источника электроэнергии преимущественно используют генераторы с когтеобразными полюсами. Такие генераторы представляют собой трехфазные электрические машины, работающие примерно по тому же принципу, что и синхронные явнополюсные электрические машины. Обычно трехфазный выходной ток генератора выпрямляется блоком диодов, включенных по пассивной мостовой схеме В6 типа схемы, показанной на фиг.1. Работа генератора регулируется током возбуждения таким образом, чтобы выходное напряжение UВ генератора устанавливалось на требуемую величину независимо от частоты вращения ротора, а в пределах эффективной мощности генератора - и независимо от нагрузки. При использовании генератора, а также соответствующей выпрямительной схемы, такой как показанная на фиг.1, отдача мощности начинается лишь по достижении ротором определенной частоты вращения, так называемой начальной частоты вращения, начиная с которой выходное напряжение генератора начинает зависеть от частоты вращения ротора. При частотах вращения ротора ниже этой начальной частоты напряжение генератора ниже напряжения аккумуляторной батареи. В этом случае мощность в электрическую бортовую сеть поступать от источника питания через мостовую выпрямительную схему В6 не может.
Увеличить мощность генератора с когтеобразными полюсами можно, повысив величину тока возбуждения. Однако такое повышение тока возбуждения приводит в тех генераторах с когтеобразными полюсами, которые обычно рассчитаны на работу в транспортных средствах, к проявлению явно выраженного эффекта магнитного насыщения. Подобный эффект магнитного насыщения может существенно замедлить повышение мощности. Кроме того, заметное увеличение тока возбуждения при длительной работе генератора приводит к его тепловой перегрузке, в результате чего указанный подход имеет временные ограничения по его использованию.
Еще одна возможность повышения мощности заключается в варьировании числа витков статорной обмотки. Увеличение числа витков статорной обмотки приводит к снижению указанной выше начальной частоты вращения ротора и к повышению выходной мощности в диапазоне низких частот вращения. Однако в этом случае заметно снижается выходная мощность в диапазоне средних и высоких частот вращения ротора. Хотя сокращение числа витков статорной обмотки и приводит к повышению мощности в диапазоне высоких частот вращения, тем не менее такое сокращение числа витков одновременно снижает мощность в диапазоне низких частот вращения и повышает начальную частоту вращения, начиная с которой выходное напряжение генератора начинает зависеть от частоты вращения ротора. По этой причине варьирование числа витков статорной обмотки не позволяет достичь целевого повышения мощности в широком диапазоне частот вращения ротора.
В заявке DE-P 19733221.8 описан способ, позволяющий за счет включения в схему за генератором повышающего, соответственно понижающего регулирующего элемента и варьирования числа витков статорной обмотки оптимальным образом изменять характеристику изменения мощности генератора. При сокращении числа витков статорной обмотки и включении в схему за генератором с выполненным на диодах выпрямителем повышающего регулирующего элемента, как описано в заявке DE-P 19845569.0, наблюдается повышение мощности в диапазоне средних и высоких частот вращения ротора. В диапазоне же низких частот вращения напряжение генератора повышают до уровня напряжения электрической бортовой сети с помощью повышающего регулирующего элемента.
Существенный недостаток выпрямления трехфазных токов генератора с помощью пассивной мостовой схемы В6 состоит в неиспользовании фазного тока и его фазы или угла выбега ротора в качестве регулируемых величин для регулирования генератора. Фазное напряжение в этом случае является неизменной величиной, задаваемой напряжением электрической бортовой сети, а угол сдвига фаз фазного тока и фазного напряжения составляет во всех рабочих точках с достаточной степенью приближения ϕ=0. По этой причине невозможно обеспечить оптимальное во всех рабочих точках управление электрической машиной в отношении выходной мощности, коэффициента полезного действия (кпд) и динамического диапазона регулирования.
При использовании вместе с генератором импульсного инвертора такое ограничение перестает существовать. Известны также публикации, посвященные использованию генератора с когтеобразными полюсами в сочетании с импульсным инвертором.
В DE-P 19733212.9 в этой связи описан способ регулирования генератора с приводом от двигателя внутреннего сгорания. При этом предполагается возможность работы с двумя диапазонами регулирования, а именно, в зоне до основной частоты вращения при низких частотах вращения и в зоне области ослабления поля возбуждения при более высоких частотах вращения ротора. Сам способ регулирования не описан. При этом регулирование тока возбуждения также не упоминается. Вместе с тем неиспользование тока возбуждения в процессе регулирования приводит к неоптимизированному по мощности и кпд режиму управления работой электрической машины, соответственно генератора.
В патенте US 5648705, соответственно в заявке ЕР 0762596 А1 описан способ, предполагающий увеличение мощности в диапазоне низких частот вращения ротора за счет изменения величины фазового угла между током в обмотке статора и напряжением ротора. Разработанная концепция регулирования в этих публикациях не описана. Если в диапазоне низких частот вращения ротора требуется не максимальная выходная мощность, то трехфазный ток генератора настраивают на величину требуемого выходного напряжения с помощью блока диодов, включенных по пассивной мостовой схеме, и регулированием только лишь тока возбуждения. Для пассивной мостовой схемы, выполненной на диодах, используют паразитные диоды МОП-транзисторных ключей схемы вентильного преобразователя электроэнергии. Однако вопрос регулирования в диапазоне средних и более высоких частот вращения ротора в указанных публикациях не рассматривается. Поэтому оптимизированный по мощности и кпд режим регулирования работы электрической машины в диапазоне средних и более высоких частот вращения ротора при полной и частичной нагрузке в данном случае не обеспечивается.
В патенте US 5663631 описана система регулирования генератора, в которой регулятор определяет величину тока возбуждения IЕ электрической машины исключительно на основании разности между заданным значением UBзад и фактическим значением UВфакт выходного постоянного напряжения ΔUВ=UВзад-UBфакт. Утол выбега δ ротора электрической машины устанавливают равным δ=90° для получения максимальной выходной мощности. Одновременно в этой публикации указывается на возможность обеспечить работу электрической машины в оптимальной по кпд рабочей точке путем соответствующего подбора угла выбега ротора. Говорится также, что угол выбега ротора можно точно отрегулировать в зависимости от величины тока возбуждения. Однако о том, каким именно образом следует варьировать угол выбега ротора в зависимости от величины тока возбуждения, в указанной публикации не говорится.
Основная особенность этого способа состоит в том, что величина тока возбуждения определяется только в зависимости от такого регулировочного параметра, как вышеописанная разность ΔUВ. Упомянутая в описании к указанному патенту коррекция угла выбега ротора выполняется только в зависимости от величины тока возбуждения.
В отличие от известного способа в формуле настоящего изобретения представлены методы, позволяющие произвольно подбирать величину и фазу тока возбуждения и фазного тока для любой частоты вращения ротора и для любой требуемой мощности генератора. В результате создается возможность подбирать из всех возможных режимов работы электрической машины, соответственно генератора такой режим, который в наибольшей степени отвечает текущим потребностям, а также возможность отрегулировать работу электрической машины, соответственно генератора на наиболее оптимальную для каждого случая рабочую точку в соответствии с заданными требованиями. Согласно предлагаемому в изобретении техническому решению требуемая выходная мощность влияет не только на заданную величину тока возбуждения, но и оказывает непосредственное влияние на все параметры управления электрической машиной, относящиеся к процессу ее регулирования.
Еще один недостаток известного из патента US 5663631 способа по сравнению с предлагаемым в изобретении решением состоит в том, что динамический диапазон регулирования определяется параметрами цепи возбуждения. Поэтому поведение электрической машины при значительных изменениях нагрузки, когда ее регулирование осуществляется таким способом, связано с тем же недостатком, что и выпрямление тока с помощью блока диодов, включенных по пассивной мостовой схеме В6. По этой причине при изменениях нагрузки отработка рассогласования в динамике обеспечивается лишь при больших постоянных времени возбудителя. В отличие от этого согласно предлагаемому в изобретении решению для высокоэффективной отработки рассогласования в динамике, возникающего при больших скачках нагрузки, предусмотрено дополнительное использование величины и фазы фазных токов.
Преимущества изобретения
Преимущество предлагаемых в изобретении способа и устройства для регулирования генератора заключается в существенном повышении как отдаваемой в нагрузку выходной мощности, так и коэффициента полезного действия генератора в широком диапазоне частот вращения ротора по сравнению с генератором с пассивной выпрямительной схемой на диодах, соответственно пассивной вентильной выпрямительной схемой.
Дополнительно предлагаемый способ обеспечивает заметное повышение динамики процесса регулирования, например при сбросе нагрузки. В современных генераторах защиту от перенапряжения при сбросе нагрузки обеспечивают выполненные в виде полупроводниковых стабилитронов выпрямительные диоды. Если генератор должен вырабатывать более высокое напряжение для электрической бортовой сети, например UВ=42 В, то возникают значительные проблемы с изготовлением полупроводниковых стабилитронов, рассчитываемых на работу при более высоком напряжении. Поэтому для обеспечения защиты от перенапряжения при сбросе нагрузки в том числе и при более высоком напряжении генератора, например UВ=42 В, необходимо использовать иные подходы к ограничению напряжения. Предлагаемый в изобретении способ позволяет достичь оптимального сочетания между повышением мощности и кпд генератора с эффективной защитой от перенапряжения при сбросе нагрузки.
Указанные преимущества достигаются в предлагаемом способе благодаря наличию в общей сложности четырех различных диапазонов регулирования, в которых осуществляется регулирование генератора. Один из этих четырех диапазонов регулирования подбирают в зависимости от имеющихся требований и граничных условий, например в зависимости от требуемой выходной мощности и заданной частоты вращения ротора генератора. Тем самым по сравнению с режимом, использующим пассивное выпрямление, становится возможным существенно эффективнее управлять электрической машиной, что позволяет повысить отдаваемую в нагрузку выходную мощность, кпд и динамику процесса регулирования.
Еще одно преимущество предлагаемого способа заключается в возможности его использования для регулирования как неявно- и явнополюсных синхронных электрических машин, так и генераторов с аналогичным им принципом действия, например генераторов с когтеобразными полюсами. При этом фазные обмотки электрической машины могут быть соединены как звездой, так и треугольником. Ниже один из вариантов предлагаемого способа рассмотрен на примере абстрактной явнополюсной синхронной электрической машины. Предлагаемый способ предполагает применение аналогичных подходов и для регулирования электрических машин с аналогичным принципом действия или с дополнительными эффектами, которыми нельзя пренебречь, такими как явно выраженная нелинейная магнитная характеристика.
Другие предпочтительные варианты осуществления изобретения представлены в зависимых пунктах формулы.
Чертежи
Ниже изобретение более подробно поясняется на примере одного из вариантов его осуществления со ссылкой на прилагаемые чертежи.
Описание
На фиг.1 для лучшего понимания сущности изобретения показаны основные компоненты генератора G с пассивной выпрямительной схемой. На фиг.1 показана схема, которая в настоящее время широко применяется в транспортных средствах для генерирования постоянного тока и в которой используются генератор с когтеобразными полюсами и блок диодов, включенных по мостовой схеме. При этом LЕ означает индуктивность обмотки возбуждения, a IЕ означает ток возбуждения. Через LS обозначена индуктивность обмотки статора, соответственно фазы обмотки. Up означает напряжение явнополюсного ротора, a R означает сопротивление обмоток. Диоды, включенные по мостовой схеме, обозначены через D1-D6, a UВ означает напряжение в электрической бортовой сети, соответственно напряжение аккумуляторной батареи.
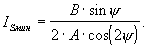
Принципиальная схема всей системы показана на фиг.2. Генератор G через элементы импульсного инвертора PWR соединен с конденсатором ZK звена постоянного тока и аккумуляторной батареей ВА. Устройство VO определяет частоту вращения nG ротора генератора и положение ротора. Отдельные регуляторы обозначены как ER (регулятор тока возбуждения), SR (регулятор тока статора),  (регулятор более высокого уровня или задающий регулятор) и SpR (регулятор напряжения). Остальные величины, указанные на фиг.2, поясняются ниже.
(регулятор более высокого уровня или задающий регулятор) и SpR (регулятор напряжения). Остальные величины, указанные на фиг.2, поясняются ниже.
Требуемую заданную мощность Рзад генератора определяет регулятор напряжения, например пропорционально-интегральный регулятор (ПИ-регулятор) на основании рассогласования между заданным и фактическим значениями напряжения аккумуляторной батареи UВзад-UВфакт. Устройство VO определения положения и частоты вращения определяет положение и частоту вращения ротора генератора. Для такого определения положения и частоты вращения ротора могут быть использованы методы, основанные, например, на оптическом, магнитном или механическом принципе. Кроме того, существуют и методы, позволяющие без использования датчиков определять положение ротора и частоту его вращения на основании сигналов, снимаемых с зажимов или выводов электрической машины. Эти методы известны и поэтому не требуют более подробного рассмотрения.
Входными величинами для задающего регулятора являются требуемая мощность Рзад генератора, частота вращения nG ротора генератора и напряжение UВфакт в звене постоянного тока. Задающий регулятор произвольно выбирает один из четырех диапазонов регулирования.
Задаваемыми величинами, которые выдает задающий регулятор, являются, как показано на фиг.2, величина ISзад и фазный угол Ψзад фазного тока, соответственно продольная и поперечная составляющие Idзад, Iqзад фазного тока, а также заданная величина IЕзад тока возбуждения. Тем самым обеспечивается возможность свободного выбора наиболее оптимальной в каждом случае рабочей точки для любой частоты вращения ротора и для любой величины мощности генератора, требуемой регулятору напряжения.
Входными величинами для регулятора тока статора являются положение и частота вращения nG ротора генератора, заданное значение фазных токов и измеренные значения линейных токов ILфакт1 и ILфакт2. На основании двух измеренных значений линейных токов можно с помощью вычислений определить величину фазных токов генератора. В другом варианте можно также непосредственно измерять все три линейных тока или два, соответственно три фазных тока.
Регулятор тока статора соответствующим образом управляет шестью переключателями импульсного инвертора (фиг.5) для подачи согласованного по величине и по фазе фазного тока. Переключатели импульсного инвертора могут быть выполнены, например, как показано на фиг.5, в виде МОП-транзисторов. В настоящее время существует большое число возможных методов ввода в трехфазную электрическую машину с помощью импульсного инвертора таких фазных токов, согласованных по величине и фазе, и поэтому такие методы, которые являются общеизвестными, не требуют подробного рассмотрения.
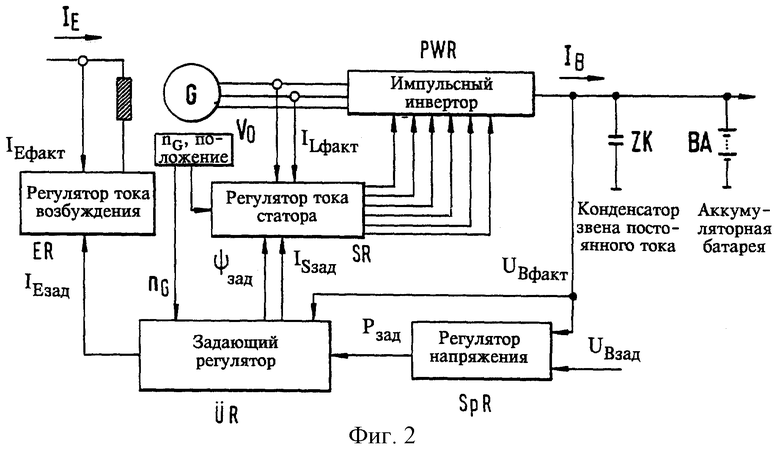
На фиг.3 показаны характеристики для трех диапазонов регулирования 1-3 в зависимости от выходной мощности РГЕН генератора и от частоты вращения nG ротора генератора.
При работе генератора с частотой вращения ротора, значения которой расположены на графике слева от кривой N23 частоты вращения, в варианте с использованием блока диодов, включенных по пассивной мостовой схеме В6, отбор мощности невозможен, поскольку выходное напряжение генератора в этом случае меньше напряжения UB в электрической бортовой сети. Кривая N23 частоты вращения соответствует работе генератора в режиме полной нагрузки с использованием блока диодов, включенных по пассивной мостовой схеме В6. Диапазоны регулирования 1 и 2 позволяют генератору отдавать мощность и в диапазонах очень низких частот вращения ротора. Таким образом, важная для пассивной выпрямительной схемы начальная частота вращения nо, начиная с которой выходное напряжение генератора начинает зависеть от частоты вращения ротора, при осуществлении предлагаемого в изобретении способа не играет более никакой роли.
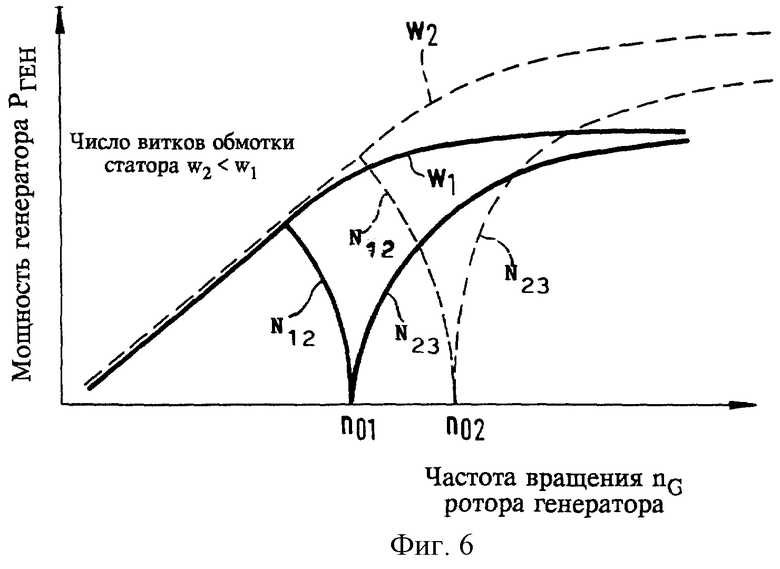
На фиг.6 показана характеристика изменения мощности генератора в зависимости от различного числа витков обмотки статора. При сокращении числа витков обмотки статора с w1 до w2 мощность при высоких частотах вращения повышается. Граничные линии N12 и N23 диапазонов регулирования смещаются в сторону более высокой частоты вращения. Однако максимальная выходная мощность, получаемая в диапазоне очень низких частот вращения, остается постоянной. При этом в диапазоне регулирования 1 выходная мощность изменяется по линейному закону, проходя вдоль той же самой прямой, независимо от числа витков обмотки статора.
Диапазоны регулирования 1-3 представляют собой также диапазоны с различным кпд. Поэтому изменение числа витков обмотки статора позволяет согласовывать с характеристикой нагрузки как параметры мощности, так и параметры кпд. Так, например, указанным способом можно добиться того, чтобы частота вращения при холостом ходе у транспортного средства приходилась на оптимальный по кпд диапазон регулирования 1.
Диапазон регулирования 1
Диапазон регулирования 1 перекрывает диапазон низких частот вращения ротора генератора. В этом диапазоне регулирования ток возбуждения IE устанавливают на максимально возможное значение, т.е. IE=IEмакс, получая за счет этого максимальное напряжение ротора в диапазоне низких частот его вращения. Из-за низкой частоты вращения фазное напряжение US по сравнению с напряжением UE в электрической бортовой сети постоянно остается на столь низком уровне, что в диапазоне регулирования 1 исключается превышение диапазона регулирования напряжения выше его задаваемой импульсным инвертором максимальной величины Uмакс. Поэтому фазное напряжение US постоянно остается ниже задаваемой импульсным инвертором максимальной величины напряжения Uмакс. Поэтому величину и фазу фазных токов можно без ограничений отрегулировать таким образом, чтобы выходная мощность электрической машины была максимальной. Величина максимально допустимого фазного тока ограничивается только нагревом электрической машины. При постоянном фазном токе IS максимальная выходная мощность электрической машины в диапазоне регулирования 1 увеличивается пропорционально частоте вращения ротора.
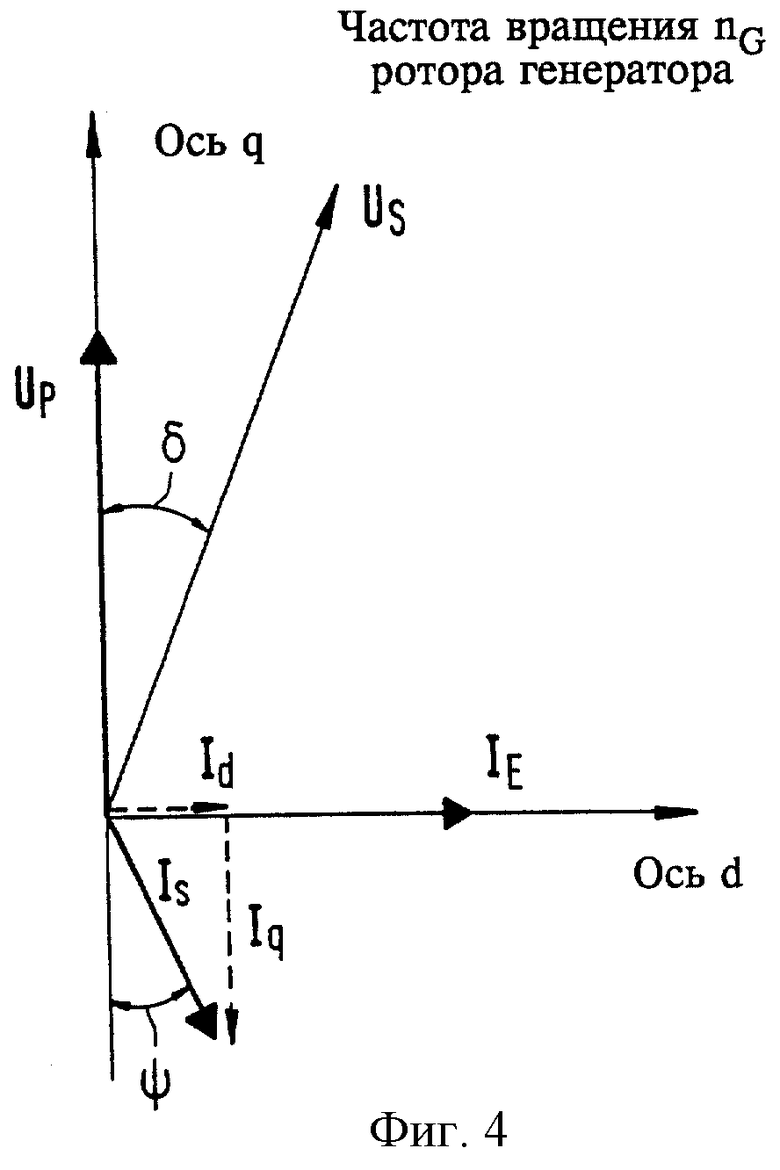
При величинах продольной и поперечной составляющих токов Id и Iq, которые соответственно определяются через указанный на фиг.4 угол Ψ как Id=IS·sinΨ, Iq=-IS·cosΨ, выходную мощность синхронной явнополюсной электрической машины можно рассчитать следующим образом:
 ,
,
где ω означает электрическую угловую частоту токов статора,
Mde означает индуктивность связи между ротором и статором.
На основании вышеприведенного уравнения, из которого следует, что IS=IS(РГЕН, ψ), для требуемой заданной мощности РГЕН генератора можно определить оптимальный угол ψопт, при котором величина фазного тока принимает минимальное значение.
При

указанные величины можно приблизительно представить в следующем виде:
Таким образом, минимизация величины фазного тока за счет установления оптимального угла ψопт для требуемой заданной мощности РГЕН сводит при максимально возможном токе возбуждения IЕ=Iмакс к минимуму омические потери в фазных обмотках. Поскольку электрические омические потери в фазных обмотках, не считая очень малой мощности потерь, постоянно остаются существенно выше электрических потерь в цепи возбуждения, электрическая машина работает в диапазоне регулирования 1 с максимальным кпд.
Начиная с определенной частоты вращения, зависящей от мощности, что на фиг.3 обозначено кривой N12 частоты вращения, импульсный инвертор не может более устанавливать фазный угол фазных токов в соответствии с подходом, используемым для диапазона регулирования 1. В этом случае фазное напряжение превышает задаваемое напряжением UВфакт промежуточного звена постоянного тока максимальное значение напряжения Uмакс в диапазоне регулирования напряжения импульсного инвертора. В результате происходит переход во второй диапазон регулирования, т.е. диапазон регулирования 2, в котором за счет соответствующего управления электрической машиной фазное напряжение должно быть ограничено его максимально возможным значением.
Диапазон регулирования 2
В диапазоне регулирования 2 далее устанавливают IЕ=Iмакс. Однако в этом случае фазный угол фазного тока выбирают с таким расчетом, чтобы фазное напряжение принимало максимальное, устанавливаемое импульсным инвертором значение, т.е. US=Uмакс. Фазный угол фазного тока выбирают таким образом, чтобы не допустить превышения максимального напряжения Uмакс в диапазоне регулирования напряжения импульсного инвертора при ослаблении магнитного поля в воздушном зазоре.
Если угол выбега ротора обозначить через δ, то при постоянном фазном напряжении US=Uмакс выходную мощность генератора можно определить по следующей формуле:

При заданном постоянном максимальном фазном напряжении Uмакс варьированием угла δ выбега ротора мощность генератора можно отрегулировать на требуемое значение. Для любой требуемой заданной мощности угол выбега ротора можно в пределах эффективной мощности генератора настроить на определенную величину δ=δ(Рзад).
При настройке угла выбега ротора δ=δ(Рзад) в электрической машине исключается превышение диапазона регулирования импульсного инвертора и соблюдается условие US=Uмакс.
Величины продольной и поперечной составляющих тока устанавливаются в соответствии со следующими зависимостями:

Величины IЕ, Id и Iq однозначно определяют режим работы электрической машины в зависимости от требуемой заданной мощности Рген.
В диапазоне регулирования 2 электрическая машина потребляет реактивную мощность PВ. С уменьшением выходной мощности (режим частичной нагрузки) cosϕ в конечном итоге достигает значения 1, т.е. фазный ток и фазное напряжение совпадают по фазе. Кривая N23 частоты вращения образует указанную границу. Однако в данном случае при еще более низких величинах мощности целесообразно продолжать работу электрической машины с cosϕ=1 с целью обеспечить максимальный кпд. Для этой цели используется диапазон регулирования 3.
Диапазон регулирования 3
Особенностью диапазона регулирования 3 является работа генератора с коэффициентом мощности cosϕ=1, когда фазный ток и фазное напряжение совпадают по фазе. Диапазон регулирования 3 соответствует работе генератора с пассивной выпрямительной схемой на диодах. Указанный диапазон регулирования вводят в режиме работы с частичной нагрузкой, начиная с диапазона средних частот вращения ротора. Для рассматриваемого случая с постоянным фазным напряжением US=Uмакс кпд генератора является максимальным. Для установления этого режима ток возбуждения регулируют таким образом, чтобы угол ϕ равнялся 0, т.е. чтобы реактивная мощность PВ была равна 0. Достижение значений мощности, лежащих выше граничной линии N23, диапазон регулирования 3 обеспечить не может, поскольку для этого случая необходим ток возбуждения IE>IЕмакс.
Величина фазного тока для диапазона регулирования 3 задается следующим образом:

Искомый угол δ выбега ротора, величина продольной и поперечной составляющих токов Id, Iq и величина тока возбуждения IЕ рассчитываются на основании уравнений для явнополюсной синхронной машины следующим образом:


Тем самым управление электрической машиной в диапазоне регулирования 3 полностью определено.
Стратегии регулирования, реализованные в рассмотренных выше диапазонах регулирования 1-3, охватывают все обычные режимы работы электрической машины.
Диапазон регулирования 4
Описанный ниже диапазон регулирования 4 предназначен в первую очередь для обеспечения высокой динамики процесса регулирования при экстремальных сбросах нагрузки. С другой стороны, назначение этой функции регулирования состоит в дополнительной защите от перенапряжений.
При превышении напряжением UВфакт настраиваемого порогового значения перенапряжения импульсный инвертор прекращает работать в обычном режиме, и переключатели импульсного инвертора замыкают накоротко трехфазные выходы генератора. В результате повышенное напряжение очень быстро снижается. Одновременно, например, в результате быстрого развозбуждения, уменьшается величина тока возбуждения в электрической машине. По достижении выходным напряжением настраиваемого порогового значения минимального напряжения, которое ниже заданного значения выходного напряжения Uвзад, управление электрической машиной снова осуществляется в соответствии с диапазонами регулирования 1-3.
Техника автоматического регулирования, используемая для осуществления способа по изобретению
В принципе границы между отдельными диапазонами регулирования можно определять путем численных вычислений, а с помощью представленных выше уравнений определять величину тока возбуждения и продольную и поперечную составляющие токов. Однако такой подход связан с очень высокими непроизводительными затратами, обусловленными сложностью и трудоемкостью вычислений. Более того, при реализации всей этой системы регулирования в транспортном средстве вычислительной производительности применяемых в транспортных средствах контроллеров по причине существующей тенденции к снижению их стоимости недостаточно для решения указанных задач.
Один из возможных путей решения этой проблемы состоит, например, в применении методов, ориентированных на представление различных величин в табличном виде. На вход задающего регулятора подаются сигналы, характеризующие величины Рзад, nG, UВ, а с его выхода выдаются сигналы, характеризующие величины IE, Id и Iq, соответственно IS и ψ. Эту зависимость выходных величин от входных можно представить в виде многомерной таблицы. Элементами такой таблицы будут в этом случае данные, рассчитанные отдельно для задающего регулятора по вышеприведенным уравнениям (диапазоны регулирования 1-4).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАГРУЗКИ НАСОСА | 2009 |
|
RU2529652C2 |
| СПОСОБ МОНИТОРИНГА КОНТРОЛЛЕРА ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2520162C2 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ТОРМОЗ ДЛЯ УНИВЕРСАЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2543617C2 |
| ЭЛЕКТРОДИНАМИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ УНИВЕРСАЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2528413C2 |
| УПРАВЛЕНИЕ И/ИЛИ РЕГУЛИРОВАНИЕ ТРЕХФАЗНОГО ПРЕОБРАЗОВАТЕЛЯ ЭЛЕКТРОЭНЕРГИИ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ АСИНХРОННОЙ МАШИНЫ | 2007 |
|
RU2455751C2 |
| ОПРЕДЕЛЕНИЕ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2009 |
|
RU2528948C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| Система подачи топлива в двигатель внутреннего сгорания | 1971 |
|
SU442614A1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| ФОРМИРОВАТЕЛЬ ПОСЫЛАЕМОГО СИГНАЛА (ВАРИАНТЫ) И СПОСОБ ФОРМИРОВАНИЯ ПОСЫЛАЕМОГО СИГНАЛА | 2009 |
|
RU2498388C2 |

В заявке описан способ оптимизированного по мощности и кпд регулирования трехфазного генератора с соответствующим преобразовательным мостом, прежде всего синхронной электрической машины, в котором определяют по меньшей мере три диапазона регулирования, в пределах которых регулирование генератора осуществляют по различным критериям. Указанные диапазоны регулирования задают, в частности, в зависимости от частоты вращения и в зависимости от требуемой заданной мощности. При этом регулируют как ток возбуждения, так и ток в обмотке статора, для чего используют различные регуляторы, которые обмениваются друг с другом информацией. Технический результат - повышение кпд. 2 с. и 8 з.п. ф-лы, 6 ил.
| Система электроснабжения для автомобилей | 1979 |
|
SU855858A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| EP 0693816 А, 24.01.1996. | |||

