Изобретение относится к движителям шагающего типа и может быть использовано в механических игрушках.
Известен шагающий движитель транспортного средства, содержащий круглый корпус с двумя группами радиально расположенных опорных ног, одна из которых жестко скреплена с корпусом, платформу, смонтированную посредством шарнирных осей в корпусе, кривошип, соединенный с приводом, имеющий ось, и шип, поворотно соединенный с платформой.
Цель изобретения достигается тем, что корпус состоит из двух подвижных относительно друг друга полукорпусов, на каждом из которых смонтирована группа опорных ног, движитель снабжен двумя поворотно смонтированными относительно полукорпусов, соединенными с полукорпусами посредством осей и расположенными между полукорпусами платформами, соединенными между собой посредством кривошипа, имеющего ось, присоединенную к приводу, а также в устройстве шагающего движителя применены механизмы, обеспечивающие плоско-параллельную подвижность полукорпусов относительно друг друга и исключающие поворот между ними, при этом управление направлением движения шагающего движителя производится выбором положения платформам относительно полукорпусов путем поворота первых на осях с помощью дополнительно смонтированных в устройстве шагающего движителя приводов или механизмов.
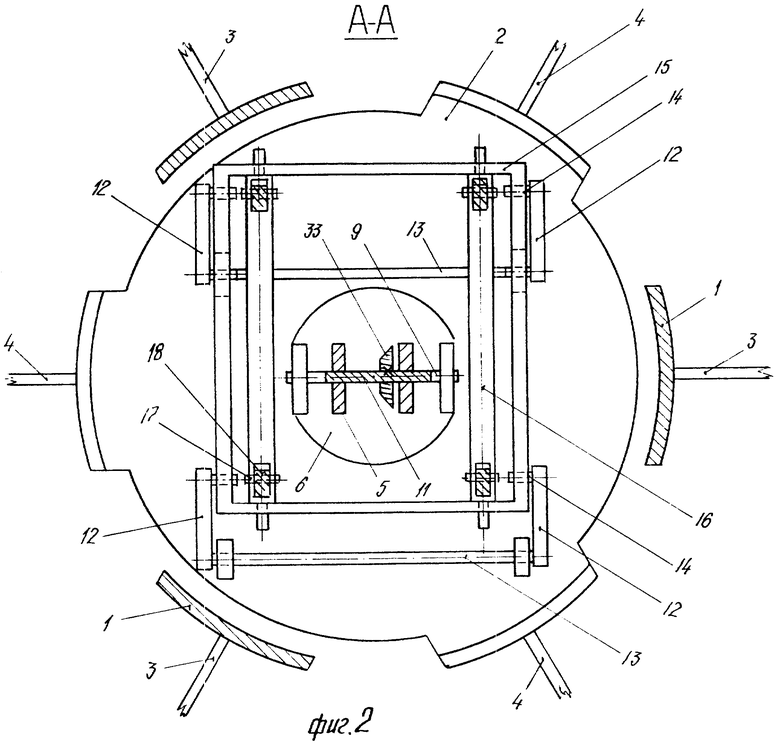
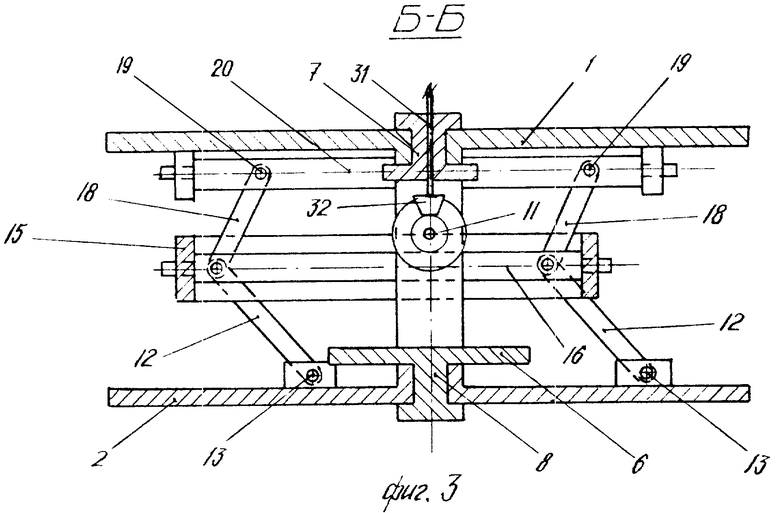
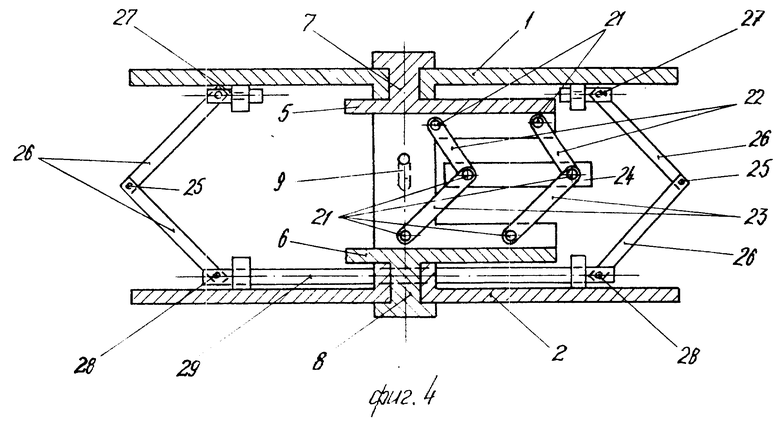
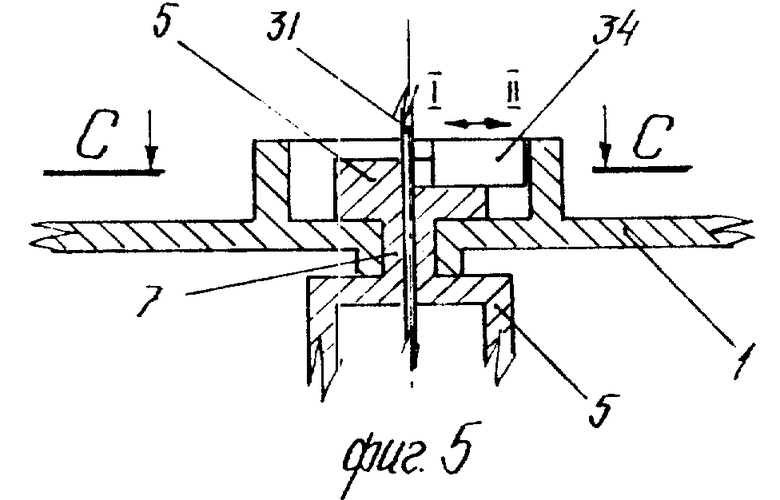
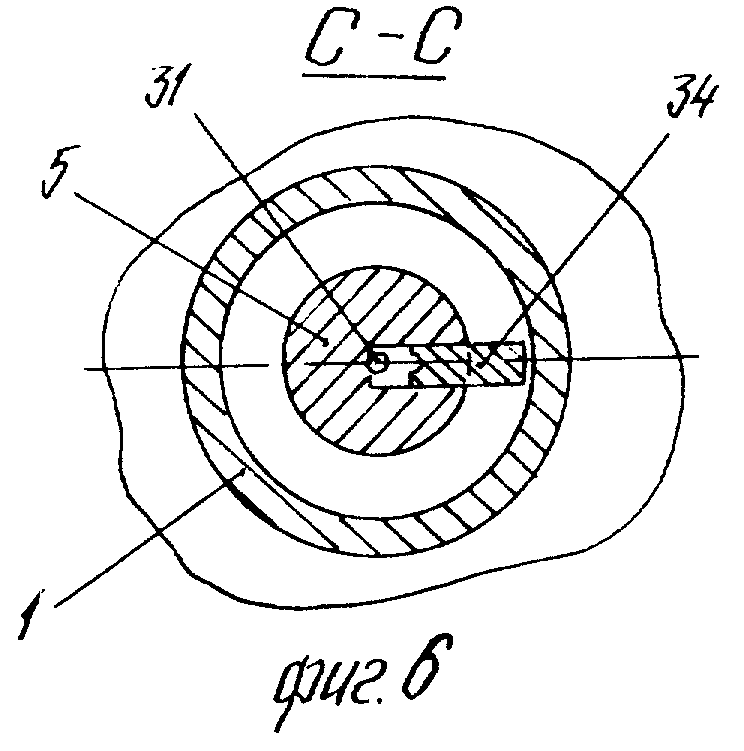
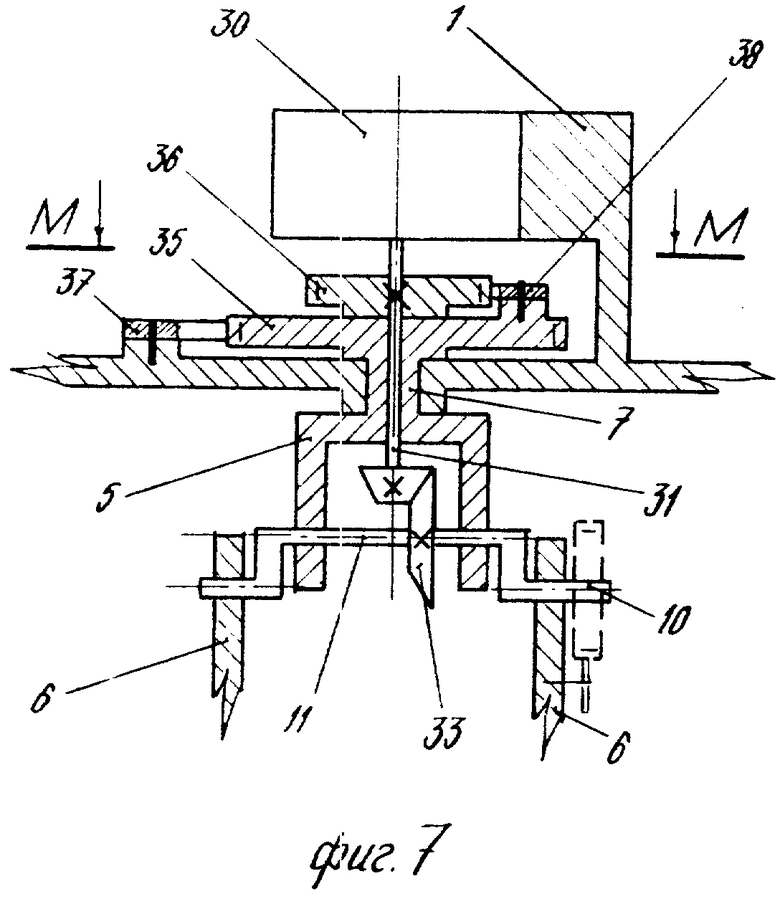
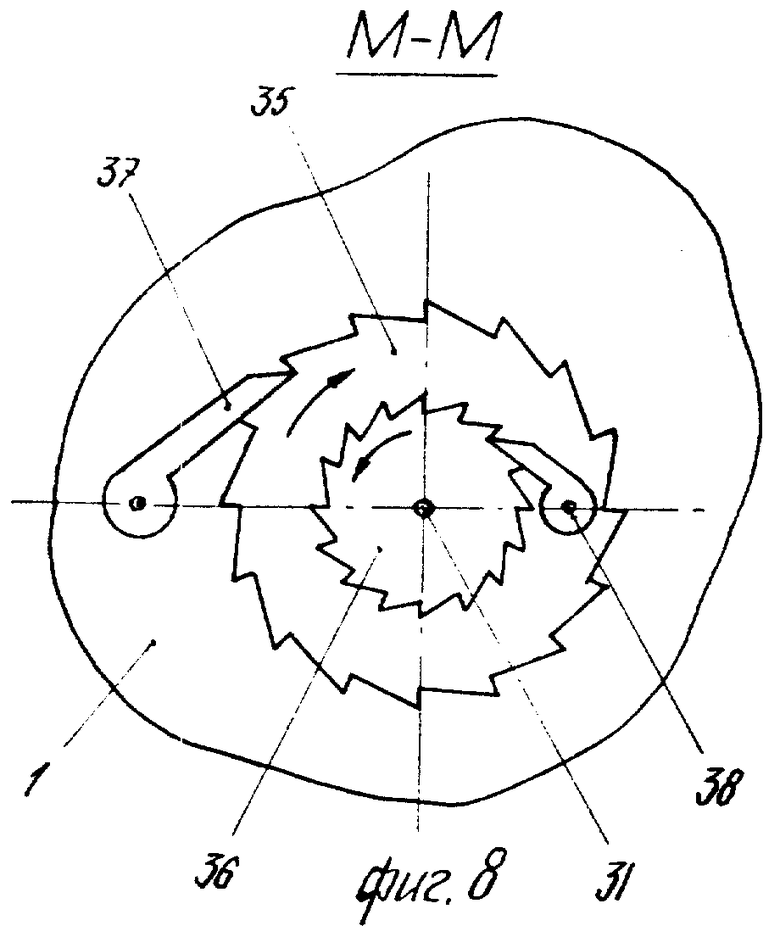
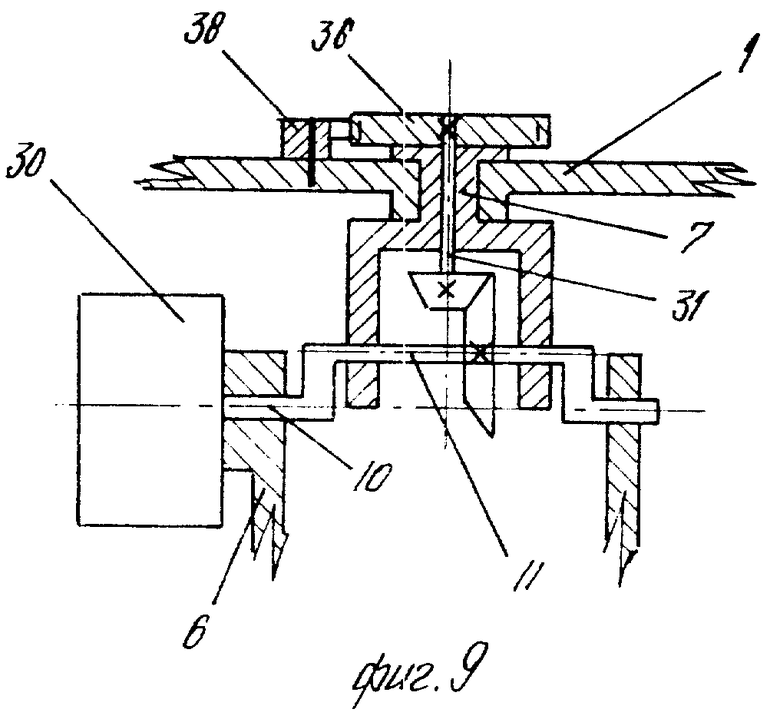
На чертеже фиг. 1 изображен шагающий движитель в поперечном разрезе; на фиг. 2 разрез A-A фиг. 1; на фиг. 3 разрез B-B фиг. 1; на фиг. 4 в поперечном разрезе шагающий движитель, в котором применен механизм, обеспечивающий параллельность осей соединяющих платформы с полукорпусами и подвижность первых относительно друг друга в плоскости перпендикулярно расположенной оси вращения кривошипа; на фиг. 5 механизм в шагающем движителе для поворота платформ относительно полукорпусов путем отбора мощности от вертикального вала; на фиг. 6 разрез C-C фиг. 5; на фиг. 7 - механизм в шагающем движителе для поворота платформ на осях относительно полукорпусов путем изменения направления вращения вала, соединяющего привод с кривошипом; на фиг. 8 разрез M-M фиг. 7; на фиг. 9 -прямая связь привода с кривошипом и шагающий движитель, в устройстве которого применен один из механизмов для поворота платформ на осях относительно полукорпусов.
Шагающий движитель состоит из полукорпусов 1, 2 (фиг. 1, фиг. 2, фиг. 3) с радиально-расположенными двумя группами опорных ног 3 и 4, где группа опорных ног 3 смонтирована на полукорпусе 1, а группа опорных ног 4 смонтирована на полукорпусе 2. В шагающем движителе применены две платформы 5 и 6, расположенные между полукорпусами 1, 2 и присоединенные поворотно, платформа 5 присоединена посредством оси 7 к полукорпусу 1, а платформа 6 - посредством оси 8 к полукорпусу 2, имеется кривошип 9, шип 10 которого соединен с платформой 5, а его ось 11 поворотно установлена на платформе 6, при этом в устройстве шагающего движителя может имеется два кривошипа 9 на противоположных концах оси 11 с соосными шипами 10.
В шагающем движителе обе группы опорных ног 3, 4 могут быть жестко скреплены со своими полукорпусами 1, 2.
С целью обеспечения плоско параллельной подвижности полукорпусам 1, 2 относительно друг друга, а также исключения поворота между ними в шагающем движителе применен механизм, содержащий расположенные под углом к плоскости полукорпуса 2, штанги 12, которые одними концами прикреплены к параллельным шарнирным осям 13, поворотно установленным на полукорпусе 2, а другими концами шарнирными 14, оси которых параллельны с осями 13, присоединены к раме-перемычке 15, на которой имеются параллельные друг другу поворотные оси 16, к которым шарнирами 17 присоединены расположенные под углом к полукорпусу 1 штанги 18, противоположные концы которых шарнирами 19 присоединены к параллельным осям 20, поворотно установленным на полукорпусе 1.
Изобретение не ограничивается приведенным вариантом механизма, обеспечивающего плоско параллельную подвижность полукорпусов 1, 2 относительно друг друга и исключающего поворот между ними.
В шагающем движителе может применятся механизм, обеспечивающий параллельность осей 7, 8, соединяющих платформы 5, 6 с полукорпусами 1, 2, и подвижность платформам 5, 6 относительно друг друга в плоскости, перпендикулярно расположенной оси вращения кривошипа 9, состоящий из двух шарнирами 21 (фиг. 4) с параллельными осями, соединенных параллелограммов, образованных двумя парами, выполненных посредством штанг, элементов 22, 23, шарнирами 21 присоединенных к перемычке 24, где одна пара элементов 22 шарнирами 21 присоединена к платформе 5, а другая пара элементов 23 к платформе 6. При этом полукорпусы связаны механизмом, состоящим из расположенных под углом друг к другу и попарно соединенных шарнирами 25 штанг 26, где одна пара штанг 26 двухстепенными шарнирами 27 присоединена к полукорпусу 1, а другая пара штанг 26 шарнирами 28 присоединена к шарнирной оси 29, поворотно установленной в полукорпусе 2, при этом пары штанг 26 подвижны в одной плоскости, проходящей через данную шарнирную ось 29.
В шагающем движителе привод 30 может быть смонтирован на одной из платформ 5 или 6 (фиг. 9) и напрямую связан с осью 11 или шипом 10 кривошипа 9.
В шагающем движителе привод 30 может быть смонтирован на полукорпусе 1 (фиг. 1) и связан с осью 2 кривошипа 9, проходящим через ось 7, валом 31 через коническую шестеренчатую передачу, состоящую из двух шестерен 32, 33.
Управление направления движения шагающего движителя производится выбором положения платформам 5, 6 относительно полукорпусов 1, 2 путем поворота первых на осях 7, 8, для чего в устройстве шагающего движителя применяются дополнительные механизмы или приводы, смонтированные на полукорпусах 1, 2 или на платформах 5, 6, обеспечивающие поворот последним на осях 7, 8 на 360o и фиксацию поворота платформ 5, 6 в определенно выбранном положении относительно полукорпусов 1, 2.
Для поворота платформ 5, 6 на осях 7, 8 и их неподвижной фиксации в определенно-выбранном положении относительно полукорпусов 1, 2 путем отбора мощности от вращательно-подвижного вала 31 в шагающем движителе применяется выполненный посредством муфты двойного действия промежуточный элемент 34 (фиг. 5, фиг. 6), смонтированный на оси 7 или на платформе 5, работающий на два положения, где в первом положении (I) промежуточный элемент 34 входит в сцепление с валом 31, который при вращении от привода 30 проворачивает платформы 5, 6 на осях 7, 8, а во втором положении (II) входит в сцепление с полукорпусом 1, чем обеспечивается неподвижность платформам 5, 6 относительно полукорпусов 1, 2.
С целью обеспечения поворотов платформ 5, 6 на осях 7, 8 путем изменения направления вращения вала 31 в устройстве шагающего движителя применяются механизмы, передающие момент вращения только в одном направлении, выполненные посредством самодействующих муфт или посредством храповых механизмов, последний в качестве примера показан на фиг. 7, фиг. 8 и состоит из храповых колес 35, 36, где колесо 35 жестко скреплено с осью 7 и взаимодействует с собачкой 37, шарнирно установленной на полукорпусе 1, а колесо 36 жестко скреплено с валом 31 и взаимодействует с собачкой 38, шарнирно установленной на колесе 35. На чертеже фиг. 8 стрелками показано направление вращения храповых колес 35, 36, при которых они не входят в зацепление с собачками 37, 38.
На чертеже фиг. 7 пунктиром показано возможное расположение колеса 36, где оно жестко скреплено с шипом 10 и взаимодействует с собачкой, шарнирно присоединенной к платформе 6.
В шагающем движителе, привод 30 которого смонтирован на одной из платформ 5 или 6 и напрямую связан с осью 11 или шипом 10 кривошипа 9, храповое колесо 36 (фиг. 9, фиг. 10) взаимодействует с собачкой 38, шарнирно установленной на полукорпусе 1.
Шагающий движитель работает следующим образом.
Привод 30 поворачивает кривошип 9, который перемещает платформы 5, 6 относительно друг друга в плоскости, перпендикулярно расположенной оси вращения кривошипа 9 и опорной плоскости, на которой находится данный шагающий движитель, при этом подвижность от платформ 5, 6 передается полукорпусам 1, 2, которые, в свою очередь поочередно опираясь группами опорных ног 3 или 4 на опорную плоскость, переносят друг друга по направлению вращения кривошипа 9. Управление направлением движения шагающего движителя производится выбором положения платформам 5, 6 относительно полукорпусов 1, 2 путем поворота первых на осях 7, 8 с помощью дополнительно смонтированных в устройстве шагающего движителя приводов или механизмов, при этом изменяется положение плоскости, в которой подвижны платформы 5 и 6 относительно опорной плоскости, в результате чего изменяется и направление подвижности полукорпусов 1, 2 по опорной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2023895C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2340506C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
Изобретение относится к движителям шагающего типа, улучшает маневренность движителя и может быть использовано в механических игрушках. Шагающий движитель состоит из двух подвижных относительно друг друга полукорпусов 1, 2, на каждом из которых смонтирована группа опорных ног 3,4, движитель снабжен расположенными между полукорпусами 1,2 двумя платформами 5, 6, где платформа 5 посредством оси 7 поворотно присоединена к полукорпусу 1, а платформа 6 посредством оси 8 - к полукорпусу 2, имеется кривошип 9, кинематически соединенный с приводом 30, шип 10 которого поворотно соединен с платформой 6, а его ось 11 поворотно установлена на платформе 5, а также в устройстве шагающего движителя применены механизмы, обеспечивающие плоско параллельную подвижность полукорпусов 1, 2 относительно друг друга и исключающие поворот между ними, при этом управление направлением движения шагающего движителя производится выбором положения платформам 5,6 относительно полукорпусов 1, 2 путем поворота первых на осях 7,8 с помощью дополнительно смонтированных в устройстве шагающего движителя приводов или механизмов. 7 з.п. ф-лы, 9 ил.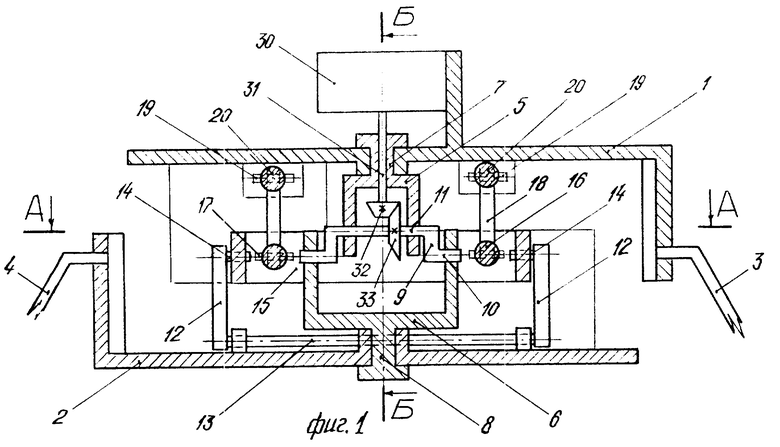
| RU, патент, 2000240, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
