Изобретение относится к измерительной навигационной аппаратуре, предназначенной для контроля пространственного положения траектории ствола скважин.
Известен способ измерения зенитных и азимутальных углов (RU 2231638 C1, МПК7 E21B 47/02, 27.06.2004). Устройство содержит три ортогонально закрепленных феррозонда и три акселерометра. По показаниям феррозондов определяют компоненты полного вектора геомагнитного поля Земли, а по показаниям акселерометров определяют компоненты полного вектора силы тяжести. По полученным данным вычисляют текущие значения азимутального и зенитного углов. Далее производят сравнение текущего замера со средним значением четырех замеров, отстающих от текущего на четыре записи, относительно допуска. Если текущий замер находится за пределами допуска, то его заменяют на среднее.
Известно также устройство для определения углов искривления скважины и положения отклонителя при бурении (RU 2184845 C1, МПК7 E21B 47/022, 10.07.2002). Устройство содержит генератор возбуждения, датчик азимута, выполненный в виде трех ортогональных феррозондов, жестко закрепленных в корпусе, датчик угла установки отклонителя, три акселерометра, оси чувствительности которых взаимно ортогональны, два коммутатора, блок управления, аналого-цифровой преобразователь (АЦП). Сигналы с феррозондов и акселерометров подаются через коммутатор на АЦП, и далее в оперативную память персональной ЭВМ. После окончания полного цикла измерения и записи в памяти ЭВМ измерения накапливаются, осредняются и после алгоритмической обработки и вычислений высвечиваются на дисплее ЭВМ в виде цифровой, графической и текстовой информации.
Недостатком этих устройств является невозможность определения параметров ориентации скважин на участках с аномальными магнитными свойствами или обсаженных стальными трубами.
Наиболее близким техническим решением к заявленному изобретению относится способ и устройство для определения углов искривления скважины (RU 2166084 C1, МПК7 E21B 47/022, 27.04.2001), содержащее блоки датчиков азимута на основе трех ортогональных феррозондов, неподвижно закрепленных относительно корпуса устройства, и датчиков угла отклонения в виде трех ортогональных акселерометров, аналого-цифровой преобразователь, блок коммутаторов, датчик температуры и давления, блок телеметрии и блок гироскопических датчиков. Способ определения углов ориентации скважины включает измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси, связанные с корпусом инклинометра, последующее преобразование первичных сигналов и определение пространственной ориентации ствола скважины. Блок гироскопических датчиков используется для измерения географического азимута при наклонно-направленном и горизонтальном бурении из обсаженной скважины.
Недостаток прототипа заключается в следующем. Включение в состав измерительного модуля трех или двух одноосных гироскопических датчиков приводит к увеличению габаритов и стоимости инклинометрической системы, что в свою очередь ограничивает возможность применения измерительной системы при бурении скважин малого диаметра. При этом стоимость самого устройства увеличивается как минимум на 20-30%.
Задачей настоящего изобретения является расширение функциональных возможностей способа за счет проведения измерений в обсаженной и не обсаженной скважинах, повышение точности реализующего его устройства за счет совместного применения феррозондов и гироскопов, а также компенсации дрейфа последних.
Поставленная задача решается, а технический результат достигается, следующим образом.
В способе определения углов искривления скважины, включающем измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси инклинометра, преобразование первичных сигналов и определение пространственной ориентации ствола скважины, согласно изобретению оценивают погрешность гироскопических датчиков с привлечением информации от спутниковой навигационной системы, корректируют величину дрейфа гироскопических датчиков с учетом информации от феррозондов, при отсутствии магнитных аномалий вычисляют углы ориентации по сигналам с феррозондов и акселерометров, при работе в средах с аномальными магнитными свойствами или обсаженных стальными трубами вычисляют параметры ориентации скважины по сигналам с гироскопов и акселерометров.
В устройстве, реализующем предложенный способ, используются микромеханические гироскопы (ММГ). Такие датчики обладают хорошими эксплуатационными, габаритными и стоимостными показателями. При этом непрерывный режим работы блока гироскопических датчиков позволяет проводить измерения в обсаженных и не обсаженных скважинах, при прохождении аномальных участков и отказе блока феррозондов.
Для уменьшения величины дрейфа ММГ и обеспечения требуемой точности реализованы операции начальной оценки погрешности и последующая коррекция гироскопических датчиков. Оценить начальное состояние погрешностей ММГ можно при помощи внешнего курсоуказателя. В качестве которого предлагается использовать спутниковую навигационную систему (СНС), например GPS или Глонасс [Первовский B.C., Биндер Я.И. Азимутальная выставка гироинклинометров для скважин произвольной ориентации с использованием GPS-компаса // Научно-технический вестник Санкт-Петербургского государственного университета информационных технологий, механики и оптики. 2009. №57. С.41-46.]. Компенсацию дрейфа предлагается осуществлять, используя информацию от феррозондовых датчиков.
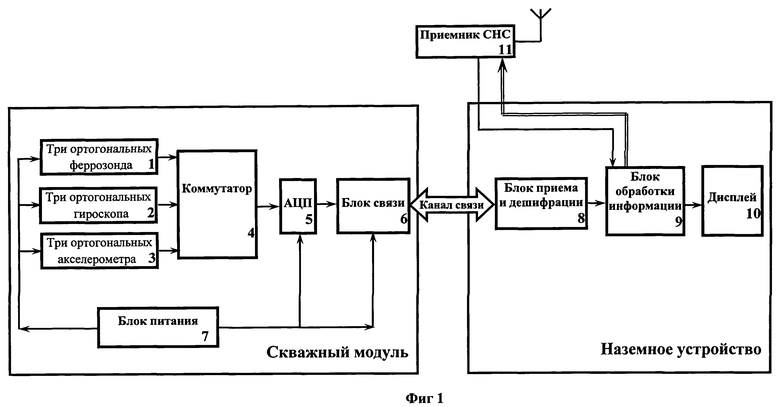
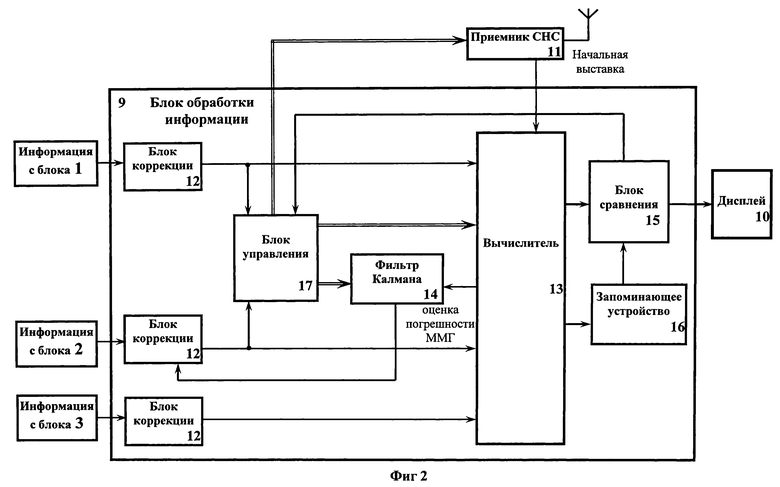
Сущность изобретения поясняется чертежами. На фиг.1 представлена структурная схема устройства для определения углов искривления скважины. На фиг.2 представлена структурная схема блока обработки информации.
Скважный модуль содержит блоки датчиков первичной информации, состоящие их трех взаимно ортогональных феррозондов 1, микромеханических гироскопов 2 и акселерометров 3, выходы которых соединены с входом коммутатора 4, АЦП 5, вход которого соединен с коммутатором, а выход с блоком связи с наземным устройством (блок телеметрии) 6, блок питания 7 датчиков и электронных схем (фиг.1). Наземное устройство состоит из последовательно соединенных блока приема и дешифрации информации 8, блока обработки информации 9, устройства отображения информации 10 (дисплей), а также приемника СНС 11, соединенного с блоком обработки информации 9.
Блок обработки информации 9, состоит из блоков коррекции 12, выходы которых соединены с вычислителем 13. Выходы вычислителя 13 соединены с фильтром Калмана 14, с блоком сравнения 15 и с запоминающим устройством 16 (фиг.2). Также блок обработки информации включает блок управления 17, на вход которого поступает информация с феррозондов 1 и гироскопов 2, с блока сравнения 15, а выход соединен с вычислителем 13, фильтром Калмана 14 и приемником СНС 11.
Устройство, реализующее предложенный способ, работает следующим образом. В устье скважины происходит начальная оценка погрешности ММГ. Для этого блок управления 17 подает управляющий сигнал на приемник СНС 11 и на вычислитель 13, где происходит вычисление географического азимута по показаниям сигналов с блока микромеханических гироскопов 2, блока акселерометров 3 и приемника СНС 11. В фильтр Калмана 14 поступает начальная оценка погрешности ММГ и далее информация о поправке погрешности передается в блок коррекции сигналов гироскопов 12.
Далее блок управления 17 подает управляющий сигнал на вычислитель 13, где происходит вычисление азимута по показаниям сигналов с блоков первичных датчиков 1-3. Здесь же происходит расчет угла магнитного наклонения и оценка величины расхождения рассчитанного значения азимута по показаниям с феррозондов и гироскопов. В запоминающем устройстве 16 фиксируются полученные опорные значения разности сигналов и угла магнитного наклонения.
В процессе измерений сигналы с блока феррозондов 1, микромеханических гироскопов 2 и акселерометров 3, через коммутатор 4 поступают в АЦП 5 и далее через блок связи 6 по каналу связи передаются в блок приема и дешифрации информации 8. Обработанная информация поступает на вход блока обработки информации 9. Показания с первичных датчиков 1-3 после коррекции в блоке 12 поступают в вычислитель 13. Здесь происходит расчет углов ориентации и оценка величины расхождения сигналов. Далее полученные значения передаются в блок сравнения 15, где сравниваются с опорными значениями, хранящимися в запоминающем устройстве 16. Если в результате сравнения полученные значения совпадают с опорными, то на экран оператора 10 выводится значение азимута, рассчитанное по результатам измерений феррозондов и акселерометров. Одновременно результат сравнения из блока 15 подается на блок управления 17. Далее в фильтре Калмана 14 по сигналу с блока управления 17 осуществляется оценка погрешности ММГ с учетом информации от феррозондов 1 и последующая коррекция сигналов гироскопов в блоке 12. Если в результате сравнения рассчитанные значения не совпадают с опорными, то на экран оператора 10 выводится значение азимута, рассчитанное по результатам измерений гироскопами и акселерометрами. Одновременно блок управления 17 подает сигнал на фильтр Калмана 14 проводить коррекцию гироскопических датчиков без привлечения информации от феррозондов 1.
Предложенный способ реализуется следующим образом.
Скважный прибор устанавливается в устье скважины. Проекции магнитного поля Земли hi, ускорения свободного падения gi и угловой скорости Земли ωi, измеренные соответственно феррозондами, акселерометрами и гироскопами в виде аналоговых сигналов поступают на коммутатор. Далее происходит преобразование аналоговых сигналов в цифровой вид в АЦП и передача в наземное устройство. В наземном устройстве происходит вычисление углов ориентации по формулам:
 ;
;
 ;
;
 ;
;
 ,
,
где αh, αω - азимут, рассчитанный по сигналам с феррозондов и гироскопов,
θ - зенитный угол,
φ - визирный угол,
d - угол магнитного склонения.
Эта начальная процедура позволяет оценить величину расхождения сигналов между феррозондами и гироскопами, а так же рассчитать значение угла магнитного наклонения, которое в устье и в стволе скважины одинаково:
Δα=αh-αω;
ϑ=arctg(h1·g1+h2·g2+h3·g3).
В процессе измерений в не обсаженной скважине величина расхождения сигналов Δα и угол магнитного наклонения в сохраняют свое значение, и в результате сравнения с опорным значением на экран оператора выводится значение азимута, рассчитанное по результатам измерений феррозондов и акселерометров.
При работе в обсаженной скважине, или на участках с аномальными магнитными свойствами возникают отклонения допустимой величины расхождения сигналов Да и угла магнитного наклонения ϑ. На экране оператора отображается значение азимута, рассчитанное по результатам измерений гироскопических датчиков и акселерометров.
Отклонение величины расхождения Δα от опорного значения может быть также вызвано дрейфом гироскопических датчиков. Таким образом, для реализации предложенного способа в устройство введен дополнительный блок приема сигналов СНС и реализована процедура компенсации дрейфа.
В предложенном способе начальная оценка погрешности ММГ осуществляется с привлечением информации с приемника СНС, для компенсации дрейфа ММГ реализована процедура оптимальной фильтрации с привлечением информации от феррозондов. При этом коррекция ММГ по сигналам с феррозондов разрешена только в том случае, если величина расхождения сигналов и угол магнитного наклонения не отличаются от опорного значения, измеренного в устье скважины.
Итак, заявляемое изобретение позволяет расширить функциональные возможности способа за счет проведения измерений в обсаженной и не обсаженной скважинах, повысить точность реализующего его устройства за счет совместного применения феррозондов и гироскопов, а также компенсации дрейфа последних.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
Изобретение относится к измерительной навигационной аппаратуре, предназначенной для контроля пространственного положения траектории ствола скважин. Техническим результатом расширение функциональных возможностей способа за счет проведения измерений в обсаженной и не обсаженной скважинах, повышение точности реализующего его устройства за счет совместного применения феррозондов и гироскопов, а также компенсации дрейфа последних. Предложен способ определения углов искривления скважины, включающий измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси инклинометра, преобразование первичных сигналов и определение пространственной ориентации ствола скважины. При этом оценивают погрешность гироскопических датчиков с привлечением информации от спутниковой навигационной системы и корректируют величину дрейфа гироскопических датчиков с учетом информации от феррозондов. Причем при отсутствии магнитных аномалий вычисляют углы ориентации по сигналам с феррозондов и акселерометров, а при работе в средах с аномальными магнитными свойствами или обсаженных стальными трубами вычисляют параметры ориентации скважины по сигналам с гироскопов и акселерометров. 2 ил.
Способ определения углов искривления скважины, включающий измерение проекций напряженности магнитного поля феррозондами, измерение проекций ускорения свободного падения акселерометрами, измерение проекций угловой скорости Земли гироскопами на оси инклинометра, преобразование первичных сигналов и определение пространственной ориентации ствола скважины, отличающийся тем, что оценивают погрешность гироскопических датчиков с привлечением информации от спутниковой навигационной системы, корректируют величину дрейфа гироскопических датчиков с учетом информации от феррозондов, при отсутствии магнитных аномалий вычисляют углы ориентации по сигналам с феррозондов и акселерометров, при работе в средах с аномальными магнитными свойствами или в средах, обсаженных стальными трубами, вычисляют параметры ориентации скважины по сигналам с гироскопов и акселерометров.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| US 5904210 А, 18.05.1999 | |||
| US 6212476 В1, 03.04.2001 | |||
| US 6508316 В2, 21.01.2003 | |||
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |

