Изобретение относится к балансировочной технике, а именно, к способам и устройствам балансировки роторов.
Известен способ динамической балансировки роторов (ОСТ 1 80195-74. Балансировка динамическая роторов гиромоторов. Типовой технологический процесс), согласно которому (пп.2.1.3.2.1.13) устанавливают ротор на опорах, совмещают одну из плоскостей коррекции с линией центров, приводят ротор во вращение на заданной частоте, определяют угол и значение дебаланса в этой плоскости, совмещают вторую плоскость с линией центров и в ней определяют параметры дисбаланса.
Указанное известное решение принято за прототип.
Наиболее близким аналогом к устройству является балансировочный станок для динамического уравновешивания роторов (а.с. СССР N 780014, G 01 M 1/16, 1949).
Техническим результатом изобретения является повышение точности балансировки за счет исключения влияния паразитных вибраций невращающихся масс колебательной системы.
На чертеже изображена схема колебательной системы балансировочного станка для осуществления способа.
Колебательная система состоит из основания 1, вибропреобразователей 2, установленных между основанием и соответствующей опорой 3, измерительной системы (не показана).
Способ вибрационной балансировки роторов осуществляют следующим образом.
Балансируемый ротор 4 устанавливают на опорах 3, соединенных неподвижно с вибропреобразователями 2. Совмещают одну из плоскостей коррекции, например, ZOY с линией центров OZ. Вращают ротор 4. Для этого сообщают ротору угловые механические колебания вокруг линии центров OZ с помощью вибропреобразователя 2 угловых колебаний (на чертеже слева снизу с креплением по оси линии центров OZ). Происходит передача мощности от вибропреобразователя 2 ротору 4 через опору 3, в результате на ротор 4 действует вращающий момент, обусловленный силой инерции, что и обеспечивает вращение ротора 4.
Вариант второй. Для вращения ротора 4 ему сообщают линейные механические колебания по оси OY1 с помощью вибропреобразователя 2 линейных колебаний (на чертеже справа вверху с креплением на основании 1). Практически эти колебания по своему воздействию близки к угловым (первый вариант), так как и в этом случае колебания ротора осуществляют вокруг одной и той же линии центров OZ. В общей случае для однозначного понимания упоминание в описании второго варианта следует исключить, так как он повторяет первый.
Вследствие действия силы инерции "тяжелое" место будет медленно двигаться к точке минимума функции как к некоторому устойчивому состоянию квазиравновесия. Верхнему положению "тяжелого" места может быть придана устойчивость путем надлежаще дозированной вибрации оси ротора 4. При стабилизации устойчивом верхнем положении фиксируют ("метят") точку положения "тяжелого" места на поверхности ротора.
Измерение времени tк движения "тяжелого" места на поверхности ротора с контрольным грузом mк и времени ti без груза к устойчивому верхнему положению осуществляют следующим образом. Готовят, например, из воска контрольный груз mк, прикрепляют его на метку "тяжелого" места на поверхности ротора 4 в плоскости Z1O1Y1, поворачивают ротор 4 так, чтобы метка "тяжелого" места из фиксированного верхнего положения переместилась в нижнее на угол, равный π, приводят ротор 4 во вращение вибрацией вокруг оси ОZ, измеряют время tк движения "тяжелого" места на заданном угловом расстоянии
с контрольным грузом mк к точке устойчивого верхнего положения, снимают контрольный груз mк. Повторяют измерения для времени ti без контрольного груза mк и производят соответствующие вычисления по выражению:
Для этого же ротора повторяют измерения в плоскости ZOY.
Для каждого последующего (i + 1)-го ротора измерения и вычисления осуществляют, как описано выше, или выполняют измерения времени ti+1 движения поверхности ротора без груза, а вычисления производят по выражению:
Пример измерений. Измерение осуществляли с помощью стенда вибрационного электродинамического ВЭДС-10А (Паспорт. Союзтогмашприбор. ПО "Виброприбор", 1981, 28 л.), использованного в качестве вибропреобразователя.
Прикладывали колебания по оси O1Y с частотой 125 Гц и перегрузкой 5g вокруг оси OZ.
Величина контрольного груза mк 0,2 г
Время движения с грузом tк 21 с
Время движения без груза ti 67,5 c, ti+1 80 c
Величина корректирующей массы mi 0,09 г, mi+1 0,076 ге
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ настройки станка для балансировки колесных пар | 1981 |
|
SU1004787A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| КОНТРОЛЬНЫЙ РОТОР ДЛЯ ПРОВЕРКИ БАЛАНСИРОВОЧНОГО СТАНКА | 2015 |
|
RU2613017C1 |
Использование: балансировочная техника, в частности может быть использовано при балансировке роторов индивидуально или в составе изделия. Сущность изобретения: частоту вращения ротору сообщают путем возбуждения в одной из опор линейных или угловых механических колебаний с осью колебаний в плоскости коррекции и проходящих через ось ротора. Затем измеряют время движения "тяжелого" места поверхности ротора к точкам устойчивого состояния квазиравновесия с контрольным грузом и без него, на основании чего определяют положение и величину корректирующей массы по предложенной зависимости. Колебательная система состоит из основания, вибропреобразователей, установленных жестко на опорах, измерительной системы. 2 с.п. ф-лы, 1 ил.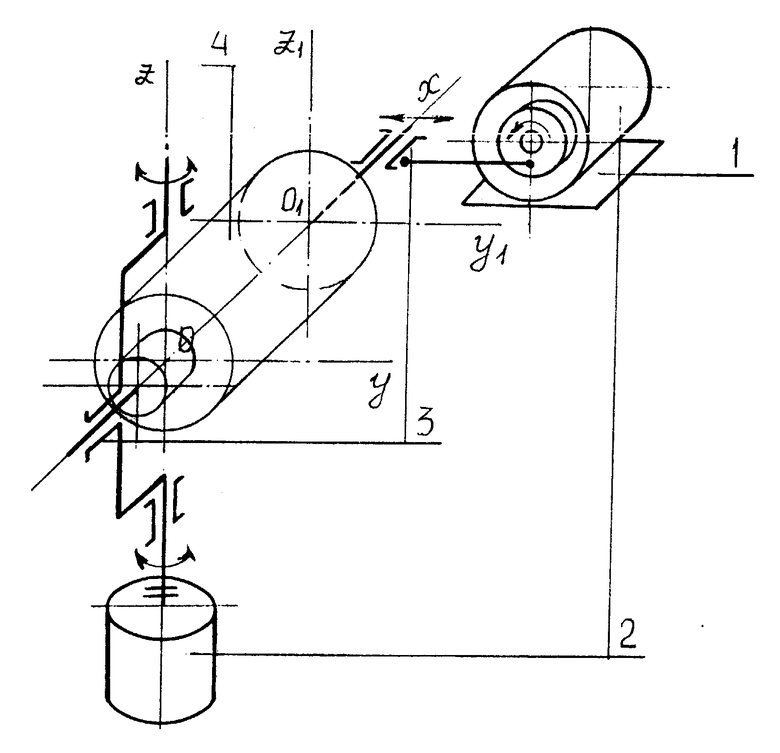
где tк время движения места неуравновешенной массы с контрольным грузом;
t время движения неуравновешенной массы без контрольного груза;
mк масса контрольного груза.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Балансировка динамическая роторов гидромоторов | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 780014, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
