Изобретение относится к области цифровых систем связи с импульсно-кодовой модуляцией (ИКМ), в частности к способам контроля этих систем.
Известны способы измерения фазового дрожания, основанные на непосредственном измерении разности фаз с помощью фазового детектора. Один из таких способов реализован в устройстве и может являться аналогом предлагаемого технического решения. При измерении дрожания фазы указанным способом вначале с помощью выделителя тактовой частоты (ВТЧ) формируется сигнал тактовой частоты, которая с помощью гетеродина преобразуется в промежуточную частоту.
Сигнал промежуточной частоты поступает на два канала опорный и измерительный. В опорном канале фазовые дрожания подавляются узкополосным кварцевым фильтром, а в измерительном канале фильтр отсутствует. Выходы двух каналов подключены к фазовому детектору, а с него сигнал, пропорциональный фазовому дрожанию, поступает на устройство функциональной обработки для получения нужной характеристики фазового дрожания, например дисперсии.
Однако более близким к предлагаемому способу по технической сущности является тот, что реализован в устройстве. Это техническое решение и выбрано в качестве прототипа. В этом устройстве имеются последовательно включенные блок согласования, выпрямитель, выделитель тактовой частоты, частотный детектор, интегратор, квадратичный детектор и индикатор. Сигнал с линии связи поступает на блок согласования, где усиливается, затем выпрямляется выпрямителем и поступает на ВТЧ. Выделенная тактовая частота поступает на частотный детектор, с помощью которого фазовые дрожания преобразуются в эквивалентные отклонения частоты. Интегрирование этих отклонений в интеграторе позволяет получить фазовые дрожания, которые далее функционально преобразуются с помощью квадратичного детектора, и результат отображается на индикаторе.
Недостаток как аналога, так и прототипа заключается в том, что описанные способы измерения дрожания фазы требует выделения тактовой частоты, а сам ВТЧ вносит дополнительные фазовые дрожания, что увеличивает погрешность измерения. Кроме того, эти способы реализованы в виде аналоговых устройств, и отсутствие первичных цифровых результатов уменьшает возможности функциональной обработки.
Задачей изобретения является повышение точности измерения и расширение функциональных возможностей.
Поставленная задача решается тем, что в известном способе измерения фазового дрожания, включающем определение отклонений фазы путем интегрирования отклонений частоты в течение времени измерения, до интегрирования отклонений частоты выбирают время измерения, равным первому интервалу времени, разбивают первый интервал времени на целое число одинаковых промежутков времени, равных второму интервалу времени, и с периодом, равным второму интервалу времени,на протяжении первого интервала времени измеряют третий интервал времени между фронтами импульсов, номинальный интервал времени между которыми соответствует целому числу периодов линейной частоты, вычисляют первую вспомогательную величину по формуле
a1 = τ3fн (1),
где а1 первая вспомогательная величина;
τ3 третий интервал времени,с;
fн номинальная линейная частота,Гц;
округляют первую вспомогательную величину до целого числа, получая таким образом вторую вспомогательную величину, вычисляют третью вспомогательную величину по формуле
где а2 вторая вспомогательная величина;
а3 третья вспомогательная величина,
вычисляют отклонение частоты от номинальной по формуле
Δf = fн(a3-1) (3),
где Δf отклонение частоты от номинальной,Гц,
измерение третьего интервала времени и вычисление первой, второй, третьей вспомогательных величин и отклонения частоты от номинальной проводят периодически, получая ряд значений отклонений частоты для дискретных моментов времени с дискретом, равным второму интервалу времени, общее количество этих значений определяют по формуле, округляя результат до целого числа
где m общее количество точек отсчета (целое число);
τ1 первый интервал времени,
τ2 второй интервал времени,
затем производят интегрирование отклонений частоты по формуле
где Δϕn отклонение фазы (рад) на дискретный момент времени n;
n номер дискретного момента времени от 1 до m;
π 3,14.
i индекс, меняющийся от 1 до n;
Dfi отклонение частоты (Гц) в дискретный момент времени, соответствующий индексу i;
вычисляют m значений отклонения фазы, после чего вычисляют вспомогательный коэффициент по формуле
где K вспомогательный коэффициент, рад;
i индекс, меняющийся от 1 до m;
Δϕi отклонение фазы в дискретный момент времени, соответствующий индексу i;
вычисляют величину фазового дрожания в долях номинальной частоты для каждого дискретного момента времени по формуле
где gn величина фазового дрожания в дискретный момент времени n;
при этом первый, второй и третий интервалы времени выбирают, исходя из частотного диапазона фазовых дрожаний по формулам
где fmin нижняя частота фазового дрожания;
где fmax верхняя частота фазового дрожания;
τ3 ≤ τ2 (10)
В предлагаемом способе основной измерительной операцией является измерение интервала времени, а именно третьего интервала времени. Схемы измерения времени широко известны, отработаны, обеспечивают получение цифрового результата с высокой точностью. Однако сам выбор измеряемого интервала между фронтами первичных импульсов сигнала, номинальный интервал времени между которыми соответствует целому числу периодов линейной частоты, являются новым, поскольку в известных способах измерения фазового дрожания первичный сигнал вначале преобразуется с помощью ВТЧ. Далее производятся вычисления, которые могут быть выполнены современными микропроцессорами. Рассмотрим более подробно эти операции.
Вначале по формуле (1) вычисляют первую вспомогательную величину а1, которая по своему физическому смыслу показывает число периодов номинальной линейной частоты fн в первом интервале времени τ1. Поскольку реальная линейная частота отличается от номинальной, число а1 не будет целым. Однако отклонения от целого не превысят единиц процента, поскольку эти отклонения обусловлены нестабильностью линейной частоты, которая для систем связи с ИКМ не превышает 0,01% и фазовым дрожанием, которое на коротких интервалах времени не превышает нескольких процентов от периода линейной частоты. Следовательно, при округлении числа а1 до целого, погрешность округления будет много меньше 0,5, т.е.50% После округления числа получается вторая вспомогательная величина а2, которая по своему физическому смыслу показывает число периодов измеренной линейной частоты в первом интервале времени τ1.
По формуле (2) вычисляют третью вспомогательную величину а3, которая по своему физическому смыслу показывает отношение измеренной линейной частоты к номинальной. Далее по формуле (3) вычисляют разность этих частот, которая может быть положительной или отрицательной, при дальнейших вычислениях знак разности должен учитываться.
Измерение третьего интервала времени производят периодически с периодом, равным второму интервалу времени в течение первого интервала времени. Определение первого и второго интервалов времени производят по формулам (8),(9) до начала непосредственных измерений. Эти формулы основаны на теореме Котельникова, условие (10) должно быть обеспечено с учетом особенностей кода. Количество измерений в одной серии определяется по формуле (4). Практически можно вначале проводить периодически m измерений третьего интервала времени, накапливая их в регистре, затем проводить вычисления по результатам этих измерений, а после завершения вычислений накапливать m результатов. При достаточном быстродействии микропроцессора можно проводить измерения и вычисления параллельно.
При обработке серии из m измерений вначале вычисляют отклонения фазы в дискретные моменты времени по формуле (5). Вследствие дискретного характера измерений в этой формуле интегрирование производится путем суммирования, что вполне допустимо. Полученные отклонения фазы содержат линейную составляющую, обусловленную отклонением среднего значения измеренной линейной частоты от номинальной, а также фазовые дрожания.
Чтобы исключить линейную составляющую, надо вначале вычислить вспомогательный коэффициент, характеризующий наклон линейной составляющей, по формуле (6). При выводе формулы учтены следующие обстоятельства. Если построить зависимость отклонения фазы от номера отсчета, представляя отклонение постоянным на каждом интервале, то получим некоторую площадь, ограниченную рядом прямоугольников. Поскольку отклонение фазы может иметь разные знаки, то при отсутствии линейной составляющей общая площадь с учетом знака элементарных площадей должна быть равна нулю. Если площадь не равна нулю, то ее можно приравнять к площади треугольника, образованного линейной составляющей фазы и осью абсцисс. Из равенства этих площадей следует формула (6). Следует отметить, что вспомогательный коэффициент может быть как положительным, так и отрицательным, либо равняться нулю при отсутствии линейной составляющей фазы.
Метод линеаризации, на котором основана формула (6), широко применяется при обработке экспериментальных данных. Экспериментальные точки всегда имеют некоторый разброс, поэтому соединяющая линия будет ломаной. При замене этой ломаной линейной зависимостью прямую линию проводят так, чтобы площади отклонений по обе стороны этой прямой были равны.
Величину фазового дрожания обычно выражают в долях периода линейной частоты, для этого отклонение фазы в радианах надо разделить на 2π. С учетом этого величину фазового дрожания для каждого дискретного момента времени вычисляют по формуле (7). Получив значения фазового дрожания в цифровой форме в дискретные моменты времени, можно рассчитать различные параметры, например среднеквадратичное значение фазового дрожания по обычным формулам для определения среднеквадратичной величины. Используя быстрое преобразование Фурье, можно найти частотный спектр фазовых дрожаний.
Таким образом, предлагаемый способ измерения фазовых дрожаний решает поставленную задачу. При этом повышение точности измерений достигается за счет выбора в качестве первичной измерительной операции измерения интервала времени с получением цифрового результата. Кроме того, предлагаемый способ позволяет расширить функциональные возможности за счет определения величины дрожания фазы в дискретные моменты времени,т.е. за счет получения первичных значений фазового дрожания, зная которые,можно вычислять любые характеристики: интегральные, частотные и т. д. Изобретение соответствует современному уровню техники, поскольку в его основе лежат цифровые методы измерения и микропроцессоры.
Устройство, осуществляющее предлагаемый способ,представлено на чертеже. Приняты следующие обозначения: формирователь фронтов 1,формирователь задержки 2, первая схема И 3,вторая схема И 4, генератор квантующих импульсов 5, третья схема И 6, микропроцессор 7,счетчик 8,первый триггер 9, схема ИЛИ 10, второй триггер 11.
Вход устройства соединен с входом формирователя фронтов 1. Вход формирования фронтов 1 соединен с первым входом формирования задержки 2, с первым входом первой системы И 3 и с вторым входом второй схемы И 4. Второй вход формирователя задержки 2 соединен с выходом генератора квантующих импульсов 5, а также с вторым входом третей схемы И 6. Вход сброса формирователя задержки 2 соединен с выходом микропроцессора 7, а также с входом сброса счетчика 8, с вторым входом схемы ИЛИ 9. Выход формирователя задержки 2 соединен с первым входом второй схемы И 4. Второй вход первой схемы И 3 соединен с инверсным выходом первого триггера 10. Выход первой схемы И 3 соединен с входом первого триггера 10, а также с входом установки второго триггера 11. Выход второй схемы И 4 соединен с первым входом схемы ИЛИ 9. Первый вход третьей схемы И 6 соединен с выходом второго триггера 11, а также с первым входом микропроцессора 7. Выход третьей схемы И 6 соединен с входом счетчика 8. Второй вход процессора 7 соединен с выходом счетчика 8. Выход схемы ИЛИ соединен с входом сброса второго триггера 11.
Устройство, осуществляющее предлагаемый способ, работает следующим образом. Сигнал в линии связи поступает на формирователь фронтов 1, в котором сигнал нормализуется по амплитуде и в зависимости от вида кода формируются импульсы, соответствующие фронтам сигнала, расстояние между которыми по оси времени соответствует целому числу периодов линейной частоты. Выделение таких фронтов предусмотрено в любой системе и ИКМ, поскольку они необходимы для работы выделителя тактовой частоты (ВТЧ), следовательно, схема такого формирователя известна.
Работа устройства происходит циклически. Цикл начинается после поступления импульса сброса от микропроцессора 7. Этот импульс устанавливает в исходное состояние формирователь задержки 2, оба триггера 10, 11 и счетчик 8. Первый пришедший после этого импульс с формирователя фронтов 1 запускает формирователь задержки 2 и, пройдя через первую схему И 3, опрокидывает первый и второй триггеры 10, 11. Через третью схему И 6 на счетчик 8 начинают приходить счетные импульсы частотой f0 с генератора квантующих импульсов 5, а вход первой схемы И 3 блокируется первым триггером 9. По окончании времени задержки tзад с выхода формирователя задержки 2 поступает разрешение на вторую схему И 4, и первый, поступающий после этого импульс с выхода формирователя фронтов 1, проходит через вторую схему И 4, схему ИЛИ 9 и поступает на вход сброса второго триггера 11.
Формирователь задержки 2 может быть выполнен на базе вычитающего счетчика. При приходе импульса "Сброс" в этот счетчик записывается некоторое число, после прихода импульса с формирователя фронтов 1 формируется разрешение на счет и происходит вычитание импульсов с частотой f0, поступающей от генератора квантующих импульсов 5. При обнулении вычитающего счетчика формируется выходной сигнал разрешения.
После сброса второго триггера 11 с его выхода на третью схему И 6 поступает запрет, прохождение счетных импульсов на счетчик 8 прекращается. Повторный запуск второго триггера 11 в течение одного цикла блокируется первым триггером 10 через первую схему И 3. С выхода второго триггера 11 на вход микропроцессора 7 поступает сигнал, разрешающий считывание информации со счетчика 8.
Длительность цикла задается микропроцессором 7 и выбирается равной длительности второго интервала времени. Длительность третьего интервала времени определяется временем, в течение которого импульсы частотой f0 поступают на счетчик 8. Это время может изменяться от цикла к циклу. Эта неравномерность определяется неравномерностью следования импульсов с выхода формирования фронтов 1 и зависит от вида кода, принятого в системе связи. Время задержки определяет нижнюю границу третьего интервала времени, а длительность цикла верхнюю.
Диапазон частот фазового дрожания, который может быть учтен в результатах измерения, зависит от длительности цикла, чем короче цикл, тем выше диапазон измеряемых частот, но на высоких частотах ограничением является недостаточное быстродействие процессора. В принципе возможна комбинированная система, когда низкочастотная часть фазовых дрожаний измеряется с помощью микропроцессора, а высокочастотная каким-либо аналоговым методом.
Источники информации:
1. Авторское свидетельство N 902272, МКИ H 04 B 3/46, 1982.
2. Авторское свидетельство N 696617, МКИ H 04 B 3/46, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| Устройство фазовой автоподстройки частоты | 1990 |
|
SU1774497A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1992 |
|
RU2050552C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФАЗОВОГО СДВИГА ПСЕВДОСЛУЧАЙНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 1991 |
|
RU2013016C1 |
| ФОРМИРОВАТЕЛЬ ЭТАЛОННЫХ ОТВЕТОВ ДЛЯ ОБУЧАЮЩИХ УСТРОЙСТВ | 1993 |
|
RU2109024C1 |
| ЦИФРОВОЙ ФАЗОМЕТР | 2002 |
|
RU2207579C1 |
| ГЕНЕРАТОР МНОГОЧАСТОТНЫХ ИЗМЕРИТЕЛЬНЫХ СИГНАЛОВ | 1992 |
|
RU2120110C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕВИЗИОННЫХ СИГНАЛОВ | 1991 |
|
RU2014745C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1991 |
|
RU2048676C1 |
Способ измерения фазового дрожания относится к области цифровых систем связи с импульсно-кодовой модуляцией, в частности к способам контроля этих систем. Предлагаемое техническое решение направлено на повышение точности измерения и расширения функциональных возможностей. Эта задача решается в предлагаемом способе за счет выбора измеряемого интервала времени между фронтами первичных импульсов сигнала, номинальный интервал времени между которыми соответствует целому числу периодов линейной частоты, в отличие от известных, где первичный сигнал вначале преобразуется с помощью ВТЧ. 1 ил.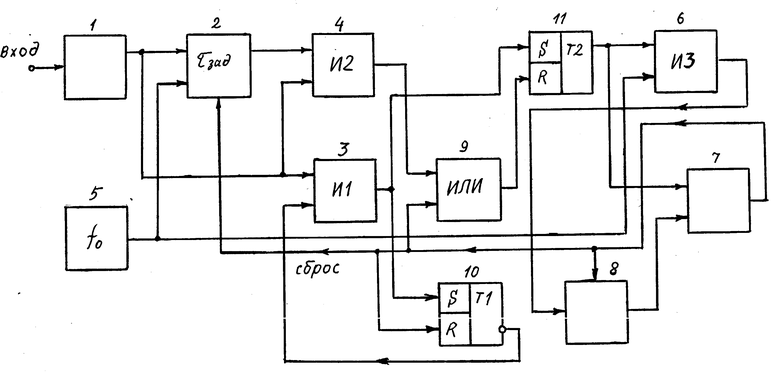
Способ измерения фазового дрожания, включающий определение отклонений фазы путем интегрирования отклонений частоты в течение времени измерения, отличающийся тем, что до интегрирования отклонений частоты выбирают время измерения, равным первому интервалу времени, разбивают первый интервал времени на целое число одинаковых промежутков времени, равных второму интервалу времени, и с периодом, равным второму интервалу времени, на протяжении первого интервала времени измеряют третий интервал времени между фронтами импульсов, номинальный интервал времени между которыми соответствует целому числу периодов линейной частоты, вычисляют первую вспомогательную величину по формуле
a1 = τ3fн,
где а1 первая вспомогательная величина;
τ3 - третий интервал времени, с;
fн номинальная линейная частота, Гц,
округляют первую вспомогательную величину до целого числа, получая таким образом вторую вспомогательную величину, вычисляют третью вспомогательную величину по формуле
где а2 вторая вспомогательная величина;
а3 третья вспомогательная величина, вычисляют отклонение частоты от номинальной по формуле
Δf = fн(a3-1),
где Δf - отклонение частоты от номинальной, Гц,
измерение третьего интервала времени и вычисление первой, второй, третьей вспомогательных величин и отклонения частоты от номинальной проводят периодически, получая ряд значений отклонений частоты для дискретных моментов времени с дискретом, равным второму интервалу времени, общее количество этих значений определяют по формуле, округляя результат до целого числа
где m общее количество точек отсчета (целое число);
τ1 - первый интервал времени;
τ2 - второй интервал времени,
затем производят интегрирование отклонений частоты по формуле
где Δϕn - отклонение фазы, рад, на дискретный момент времени n;
n номер дискретного момента времени от 1 до m;
i индекс, меняющийся от 1 до n;
Δfi - отклонение частоты, Гц, в дискретный момент времени, соответствующий индексу i,
вычисляют m значений отклонения фазы, после чего вычисляют вспомогательный коэффициент по формуле
где К вспомогательный коэффициент, рад;
i индекс, меняющийся от 1 до m;
Δϕi - отклонение фазы в дискретный момент времени, соответствующий индексу i;
вычисляют величину фазового дрожания в долях периода номинальной частоты для каждого дискретного момента времени по формуле
где gn величина фазового дрожания в дискретный момент времени n,
при этом первый, второй и третий интервалы времени выбирают, исходя из частотного диапазона фазовых дрожаний по формулам
где fm i n нижняя частота фазового дрожания,
где fm a x верхняя частота фазового дрожания,
τ3 ≤ τ2.с
| SU, авторское свидетельство, 696617, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
