Изобретение относится к области нефтепромысловой геофизики, в частности к технике инклинометрических измерений, и может быть использовано для увеличения точности измерения параметров искривления скважин.
Известен способ обработки выходных сигналов синусно-косинусных инклинометрических преобразователей, основанный на введении в выходной сигнал поправки, компенсирующей погрешность преобразователей, заключающийся в том, что поправку формируют путем суммирования сигнала одного из каналов обработки с определенной частью сигнала из другого канала обработки сигналов [1] Недостаток способа состоит в том, что он имеет ограниченные эксплуатационные возможности, т.к. не позволяет устранить погрешности смещения нулевых уровней сигналов в каналах обработки синусно-конусных преобразователей и нелинейность характеристик преобразователей, когда сигналы последних представляют собой суммы ряда гармоник.
Известен также способ обработки выходных сигналов синусно-конусных преобразователей, основанный на введении в выходной сигнал компенсирующей погрешности измерения поправки, которую формируют путем суммирования сигнала одного из каналов обработки с определенной частью сигнала из другого канала обработки, при этом измеряют отношения выходных сигналов синусно-косинусных преобразователей при двух углах, кратных 45o, абсолютная разность между которыми составляет 90o [2] Данный способ обработки сигналов, как и предыдущий, не позволяет компенсировать погрешности смещений нулевых уровней сигналов и нелинейности характеристик преобразователей. Однако по сравнению с предыдущим обладает более высокими эффективностью и точностью, т.к. предполагает измерения отношений сигналов преобразователей, практически слабо зависящих от напряжения питания преобразователей и температуры окружающей среды, и требует только два контрольных измерения.
Известен также способ обработки сигналов преобразователей, содержащих синусно-косинусные датчики, реализованный в феррозондовом датчике азимута и заключающийся в том, что на основе гармонического анализа функции, описывающей систематическую погрешность преобразования без поправок, определяют коэффициенты, с помощью которых формируют гармонические функции, корректирующие статическую характеристику датчика в направлении уменьшения разности между измеренными и заданными значениями параметра [3] Преимуществом этого способа по сравнению с рассмотренными выше является универсальность, обусловленная возможностью компенсировать погрешности от различных факторов посредством изменения числа корректирующих функций. Однако существенный недостаток его состоит в том, что для формирования и введения корректирующих функций (поправок) используется промежуточный параметр (в данном случае напряжение), отличающийся по размерности от выходного параметра датчика, вследствие чего использование способа влечет за собой как структурные изменения в схеме датчика, усложняющие его конструкцию, так и усложнение алгоритма обработки информационного сигнала, поскольку в этом случае для промежуточного параметра необходимо вводить специальный масштаб, пропорциональный масштабу выходного параметра датчика.
В качестве прототипа принят способ обработки выходных сигналов инклинометрических преобразователей, реализованный в феррозондовом датчике азимута и заключающийся в том, что диапазон изменения измеряемых (заданных) значений параметра разбивают на интервал, для каждого интервала формируют постоянную поправку, равную по величине и противоположную по знаку среднему значению систематической погрешности на данном интервале, и суммируют поправки с выходным сигналом датчика. При этом для разделяющих интервалы заданных значений параметра задают соответствующие значения связанного с выходным сигналом датчика промежуточного параметра, по которым производят переключения интервалов [4]
Преимуществом данного способа является универсальность, что позволяет использовать его для компенсации систематических погрешностей инклинометрических преобразователей практически с любым законом изменения. Кроме того, достоинством способа является то, что его применение не связано с необходимостью внесения каких-либо структурных изменений в схему датчика. Тем не менее способ имеет существенные недостатки, к которым относятся использование промежуточного параметра, связанного с выходным сигналом преобразователя посредством специально вводимого масштабного коэффициента, усложняющего алгоритм обработки информации, и неоднозначность результатов измерений при переходах измеряемых значений параметра через границы интервалов, которая носит релейный характер и приводит к неопределенности показаний прибора. Недостатком способа является также необходимость использования большого числа постоянных коэффициентов, которое должно быть значительно увеличено для относительно небольшого увеличения точности измерений. При этом в средах обработки информации требуется использование большого объема постоянной памяти для хранения служебной информации.
Задачей, на решение которой направлены заявляемые изобретения, является повышение точности конечных результатов измерений, в том числе при использовании преобразователей, имеющих сравнительно невысокую собственную точность.
Технический результат, который может быть получен при использовании изобретений, заключается в снижении трудоемкости калибровки инклинометрических преобразователей и уменьшения объема запоминаемой служебной информации.
Решение задачи по первому варианту достигается тем, что в способе обработки сигналов инклинометрических преобразователей, заключающемся в том, что из получаемых с выходов преобразователей измеренных значений параметров вычитают поправки, определяемые путем измерения ряда дискретных значений систематических погрешностей, поправки формируют в виде непрерывных функций, описывающих систематические погрешности преобразователей в зависимости от данных значений измеряемых параметров, причем вместо заданных значений параметров в них используют измеренные значения параметров, получаемые с выходов преобразователей.
По второму варианту способа поправки формируют в виде непрерывных функций, описывающих зависимости разностей между получаемыми с выходов преобразователей измеренными значениями параметров и заданными значениями параметров от измеренных значений параметров.
В соответствии с принятым в измерительной технике определением (ГОСТ 8.009-84) систематическая погрешность инклинометрического преобразователя представляет собой величину:
Δψ = ψп- ψ, (1)
где ψ истинное или заданное в процессе метрологической поверки значение измеренного углового параметра (азимутального, зенитного или визирного углов);
jп значение измеряемого параметра, полученное в результате процесса измерения с выхода преобразователя, или измеренное значение параметра.
Систематическую погрешность рассматривают как функцию заданного значения измеряемого параметра:
Δψ = Δψ(ψ), (2)
по закону изменения и экстремальным значениям которой оценивают точность преобразователей.
Измеренное значение параметра, входящее в уравнение (1), является статической характеристикой преобразователя и определяется не только заданным значением параметра, но и рядом влияющих факторов p1, p2, pn, отражающих особенности построения и условия эксплуатации преобразователей. Его рассматривают как функцию:
ψп = ψп(ψ,p1,p2,...,pn). (3)
В известных способах обработки сигналов изменяют статическую характеристику преобразователей ψп таким образом, чтобы новая характеристика ψ
В отличие от этого в способе-прототипе исходную статическую характеристику устройства оставляют без изменений, но для повышения точности измерений ее суммируют с поправкой F, представляющей собой совокупность целых чисел.
В данном случае действует равенство:
Δψ = ψп+ F - ψ, (4)
из которого видно, что при максимальном приближении значений Δψ и F заданные и измерительные значения параметров становятся примерно равными jп ≅ ψ а результирующая систематическая погрешность стремится к нулю. Управление выбором дискретных значений поправки F в этом способе осуществляют по измеренным значениям параметров, и поправка может быть рассмотрена как функция F(ψп)
Существенное отличие первого варианта заявляемого способа от прототипа заключается в том, что в нем в качестве поправки используют непрерывную функцию Δψ(ψ) описывающую систематическую погрешность преобразователя. При этом, используя гармонический анализ, ее представляют в виде суммы непрерывных функций (гармоник) заданного значения параметра ψ которое далее заменяют измеренным значением jп Таким образом, поправкой является величина Δψ(ψп) и систематическая погрешность становится равной
Δψ1(ψ) = Δψ(ψ) - Δψ(ψп) (5)
Покажем, что Δψ1(ψ) < Δψ(ψ) т.е. первый вариант способа приводит к увеличению точности. Для этого рассмотрим статическую характеристику и погрешность синусно-косинусного инклинометрического преобразователя с учетом неидентичности коэффициентов преобразования по синусной и косинусной составляющим вектора измеряемого физического поля.
Статическая характеристика в данном случае имеет вид:
а погрешность составляет
где Ks и Kc отмеченные выше коэффициенты преобразования;
относительный разброс коэффициентов преобразования.
Для наглядности представим погрешность в виде:
Δψ(ψ) = arcsin[C•sin(2ψ+Δψ(ψ))]
и, учитывая, что она реально не превышает 3.4o, заменим приближенной формулой:
Δψ(ψ) = C•sin2ψ. (9)
В качестве поправки в данном варианте способа примем функцию (9), заменив в ней ψ на ψп Следовательно, результирующая погрешность при измерении параметров составит
Δψ1(ψ) = C•sin2ψ - C•sin2ψп. (10)
Если положить cos2Δψ ≅ 1 то ее можно представить как
Δψ1(ψ) = C•sin2Δψ(ψ)•cos2ψ . (11)
Сравнение максимальных значений погрешностей (9) и (11) с помощью коэффициента
показывает, что при Δψm 1,0o А 28,6; а при Δψm 3,0o А 9,5; т.е. ψ1(ψ) ≪ ψ(ψ) и заявляемый способ существенно повышает точность измерений.
Существенное отличие второго варианта заявляемого способа от известных состоит в том, что в нем в качестве поправки применяют другую функцию δψ(ψп) для определения которой используют шкалу отсчета измеренных значений параметра ψп а не заданных ψ как это принято в известных способах. При этом функция dj(ψп) описывает закон изменения разности измеренных и заданных значений параметра ψп - ψ но не является систематической погрешностью преобразователя, т.к. не подпадает под определение этой величины.
Рассмотрим эффективность второго варианта способа, используя предыдущий пример синусно-косинусного преобразователя.
Определим поправку δψ(ψп) из уравнения (1), подставив в него значение ψ из формулы (6): .
.
Далее из уравнения (4) найдем погрешность, которая получается в результате использования полученной поправки:
Для упрощения анализа уравнения (14) достаточно определить разность
откуда следует, что Δψ2(ψ) = ψ - ψ = 0 т.е. заявляемый способ позволяет полностью компенсировать систематическую погрешность преобразователя при измерениях.
На чертеже представлены графики изменения систематических погрешностей реального инклинометрического преобразователя (преобразователи азимута инклинометра):
а без использования поправки;
б при использовании первого варианта заявляемого способа.
Для осуществления первого варианта заявляемого способа выполняют следующие операции:
1. Определяют систематическую погрешность преобразователя, задавая ряд значений измеряемого параметра ψ по диапазону его изменения и определяя измеренное значение параметра jп на выходе преобразователя. По точкам Δψi = ψпi- ψi где i номер измерения, строят график изменения систематической погрешности Δψ(ψ) (фиг. 1, а).
2. Определяют аналитическое выражение, которое наиболее точно описывает график изменения погрешности. В качестве такого выражения используют сумму гармоник углового параметра ψ или ряд Фурье, при этом амплитуды гармоник или коэффициенты ряда находят с помощью любого из известных графо-аналитических методов. (Например Бессонов Л.А. "Теоретические основы электротехники". Изд. 6-е. М. Высшая школа,1973 г. с. 752). Представляют закон изменения систематической погрешности в следующем виде:
оставляя в правой части гармоники, имеющие небольшой удельный вес.
3. Значения постоянных коэффициентов B0, B1s, B1c, B2s, B2c вводят в память вычислителя, который используется совместно с преобразователем.
4. Формулу, описывающую закон изменения систематической погрешности, используют в качестве поправки, при этом в ней производят замену аргумента ψ на ψп
5. Для обработки информации в процессе текущих измерений параметров используют следующий алгоритм (с учетом (15)):
Таким образом, использование предложенного способа обработки сигналов инклинометрических преобразователей позволяет значительно уменьшить погрешности измерений, что соответственно значительно повышает точность конечных результатов измерений.
Пример. Представление функции, описывающей систематическую погрешность реального преобразователя азимута (фиг. 1, а) в виде суммы гармоник, дает следующие значения коэффициентов:
B0 -0,015;
B1s 0,430; B1c -0,394;
B2s 0,039; B2c 0,011;
B3s 0,008; B3c -0,005;
Обработка текущей информации с учетом только трех коэффициентов по алгоритму
где ψп измеренное значение параметра, получаемое с выхода преобразователя, позволяет уменьшить погрешность измерений и соответственно повысить точность результатов измерений примерно в 8 раз (фиг. 1, б).
Для осуществления второго варианта заявляемого способа выполняют следующие операции:
1. Производят разбиение диапазона изменения измеренного значения параметров ψп на равномерные интервалы.
2. Для каждого из разделяющих интервалы значений ψп находят разности δψi= ψпi- ψi совокупность которых определяет закон изменений функции δψ(ψп)
3. Определяют аналитическое выражение, наиболее точно аппроксимирующее функцию δψ(ψп) В частности, таким выражением может быть ряд Фурье, постоянные коэффициенты которого определяются одним из известных графоаналитических методов по графику функции δψ(ψп) С помощью ряда Фурье указанную функцию записывают в виде:
4. Функцию (19) в аналитическом выражении используют в качестве поправки, компенсирующей систематическую погрешность преобразователей. При этом алгоритм обработки информации в ходе текущих измерений параметров представляют следующим образом:
где значения постоянных коэффициентов C0, C1s, C1c регистрируют в постоянном запоминающем устройстве вычислителя, используемого совместно с измерительным преобразователем.
Заявляемые способы обработки сигналов инклинометрических датчиков по сравнению с прототипом позволяют существенно сократить объем запоминаемой служебной информации. Так, для увеличения точности измерений примерно в 10 раз при использовании первого варианта способа практически достаточно использовать пять первых коэффициентов в разложении (16). В прототипе для достижения такого же результата требуется не менее 15 20 постоянных коэффициентов. Второй вариант способа при использовании пяти первых коэффициентов в разложении дает почти 50-кратное повышение точности, причем остаточная погрешность измерения носит случайных характер и определяется в основном только помехами.
Для реализации способов не требуется использование каких-либо специализированных устройств, т. к. все операции выполняются с помощью вычислительного устройства инклинометрической системы, причем для определения значений ψп по которым задаются поправки, в память вычислительного устройства вводят нулевые значения постоянных коэффициентов B и C, не меняя программное обеспечение. Для вычисления постоянных коэффициентов при гармоническом анализе функций, описывающих систематические погрешности, целесообразно использовать лабораторные компьютеры и специальные программы.
Использование: нефтепромысловая геофизика, измерение параметров искривления наклонно направленных скважин. Сущность изобретения: по первому варианту определяют систематические погрешности преобразователей, на основе выходных сигналов преобразователей формируют поправки в виде непрерывных функций, аппроксимирующих зависимости систематических погрешностей преобразователей от заданных значений параметров, представленных измеренными значениями параметров, и вычитают полученные поправки из измеренных преобразователями значений параметров. По второму варианту поправки формируют в виде непрерывных функций, аппроксимирующих разности между измеренными значениями параметров и заданными значениями параметров в зависимости от измеренных значений параметров. 2 с.п. ф-лы, 1 ил.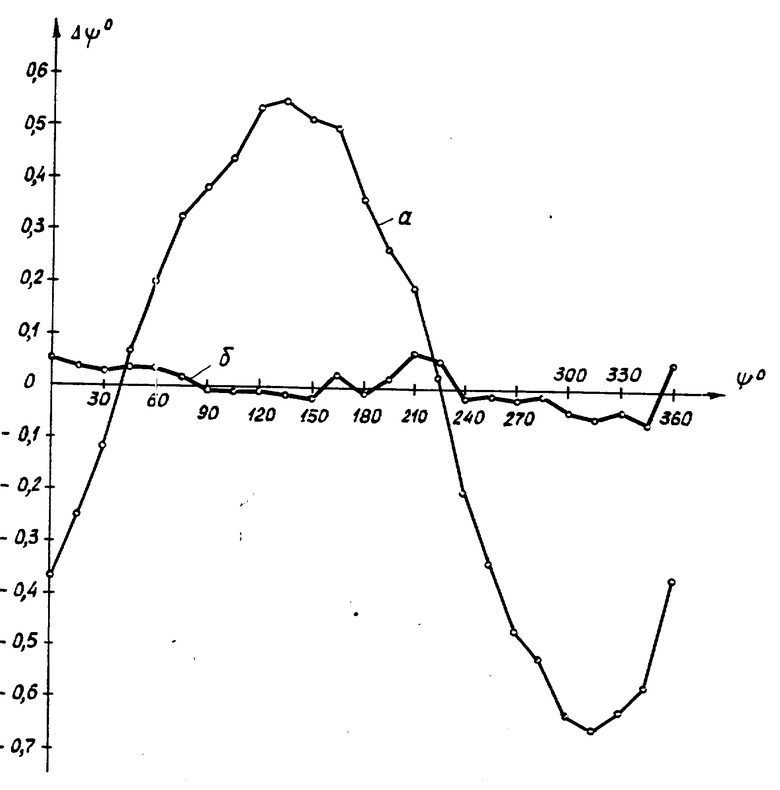
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1300146, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1693237, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1121407, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 964119, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
