Изобретение относится к радиолокации и может быть использовано в бортовых импульсно-доплеровских радиолокационных станциях (БРЛС) при слежении за целью, находящейся на ракурсе 4/4.
При работе БРЛС на фоне Земли при атаке цели, находящейся на ракурсе 4/4, доплеровская частота отраженного от цели сигнала практически не отличается от доплеровской частоты отражений от Земли - пассивных помех (ПП) по главному лучу диаграммы направленности антенны.
Если мощность ПП превышает мощность отражений от цели, бортовые следящие системы переходят на сопровождение сигналов ПП, срывая тем самым сопровождение цели.
В известных устройствах импульсно-доплеровоких БРЛС (см. Дудник П.И., Чересов Ю. И. Авиационные радиолокационные устройства. М., изд. ВВИА им. проф. Н.Е. Жуковского, 1986 г., стр. 246, рис, 8.15) борьба с мешающими отражениями ПП осуществляется тем, что прием сигналов, отраженных от цели, осуществляется в частотной области, свободной от ПП, т.е. в частотной области в районе ракурса 4/4 не имеется аппаратурных средств для приема отраженных от цели сигналов.
В известном устройстве (см. Справочник по радиолокации, под редакцией М. Скольника, М., Советское радио, 1979 г., т.3, стр. 369, рис. 6), являющемся прототипом предлагаемого изобретения, борьба с ПП осуществляется с помощью фильтрации. Центральная частота пропускания фильтра режекции пассивных помех по главному лучу диаграммы направленности антенны (ПП) устанавливается на значении, соответствующем выходному устройству слежения за ПП, в качестве которого возможен вычислитель частоты ПП, определяющий ее по скорости движения носителя РЛС и положению ее антенны (тот же справочник, стр. 375).
fПП= KvИД= K•vиcos(ϕв+α)cosϕг (1),
где К - коэффициент пропорциональности;
fПП - частоте отражений ПП;
vИД - проекция скорости истребителя на линию визирования;
vИ - скорость истребителя;
ϕг,ϕв - пеленги цели,
α - угол атаки.
Затухание фильтра пассивных помех выбирается таким, чтобы подавить наиболее возможные по мощности ПП.
При слежении за целью при переходе ее к ракурсу 4/4 отраженный от цели сигнал по частоте попадает в область режекции. ПП ослабляется до уровня шумов, устройства, следящие за целью по угловым координатам, дальности и доплеровской частоте, переходят в режим экстраполяции. При выходе отраженного от цели сигнала из зоны режекции устройства слежения продолжат сопровождение цели при условии, что экстраполированные координаты цели отличаются от истинных на величину, меньшую ширины дискриминационных характеристик следящих устройств.
Из рассмотренного следует, что высокий коэффициент затухания фильтра режекции ПП приводит к тому, что подавленными будут и те цели, мощность отражений которых в конкретном случае может быть выше мощности отражений от земли. Такие ситуации возможны, так как эффективная площадь рассеивания (ЭПР) цели при ракурсе 4/4 резко возрастает и может превышать ЭПР при ракурсе 4/4 на 15-20 дБ и в то же время мощность отражений ПП резко отличается в зависимости от вида подстилающей поверхности.
Рассмотрим процесс экстраполяции координат цели. Например, устройство слежения по угловым координатам (см. Бортовые радиолокационные устройства, под редакцией Д. Повейсила, Р.Ровена, П. Уотермана. М., Воениздат, 1964 г., стр. 485, рис. 9.4/ состоит из пеленгационного устройства, выходной сигнал которого поступает на вход интегратора, создающего систему со астатизмом второго порядка, сигнал с выхода интегратора подается на первый вход сравнивающего устройства, на второй вход которого подается сигнал о выходе датчика угловой скорости линии визирования, выходной сигнал сравнивающего устройства подается на привод антенн. Совокупность сравнивающего устройства, датчика угловой скорости линии визирования и привода, антенны называют контуром стабилизации антенны.
При пропадании сигнала обнуляется сигнал на входе интегратора и на его выходе запоминается значение ω*, равного угловой скорости линии визирования. Таким образом, организуется экстраполяция угловых координат цели с запомненным значением угловой скорости линии визирования.
Устройство слежения по углам может иметь другое структурное построение, но при этом должна быть организована экстраполяция угловых координат с запомненными значениями угловой скорости линии визирования.
Устройство слежения по дальности обычно состоит из временного дискриминатора, корректирующего звена, одного или двух интеграторов (см. Г.Б. Белоцерковский. Основы радиолокации и радиолокационные устройства. М., Советское радио, 1975, стр. 175, рис. 7.4а).
Обязательными являются временной дискриминатор, первый интегратор и корректирующее звено. Эти три элемента в формуле предлагаемого изобретения названы основной частью дальномера. В настоящее время используются в основном дальномеры с двумя интеграторами.
При пропадании сигнала дальномер запоминает вычисленное значение скорости сближения (Г.Б. Белоцерковский, стр. 178), на выходе второго интегратора дальность изменяется по линейному закону.
Устройство слежения по частоте по структурной схеме близко к устройству слежение по дальности (см. Бортовые радиолокационные устройства, под редакцией Д. Повейсила и др. М., Воениздат, 1964, стр. 397; Г.Б. Белоцерковский, стр. 179). Оно также может быть реализовано как система с асматизмом первого или второго порядка относительно доплеровской частоты.
Рассмотрим возможность перезахвата целей без поиска после прохода зоны ПП.
Угловые координаты изменяются согласно уравнениям
а скорость сближения определяется
(В. Г. Тарасов. Межсамолетная навигация. М., "Машиностроение", 1980 г., стр.62-63).
где ϕ - пеленг цели;
ωc - угловая скорость движения носителя БРЛС;
ωл - угловая скорость линии визирования;
q - ракурс цели;
vц -скорость цели.
Из (4) видно, что при q = 90o, cosq=0, дальность изменяется только за счет собственного движения, и за время пребывания цели в зоне интенсивных отражений от Земли (порядка 3-5 с) относительное изменение D не велико. Следовательно, незначительно изменяется угловая скорость линии визирования,
Так, например при D = 15 км, ϕ=0, vИ=vЦ=250 м/с за время 5 с угловая скорость линии визирования изменится на величину
где D(t1), D(t2) - дальности входа в зону интенсивных отражений ПП и выхода из нее.
Подставив в выражения (5) и (4) численные значения, получим оценку величины Δωл =0,09o. Угловая ошибка при этом будет 0,09•5=0,45o.
При ширине диаграммы направленности современных БРЛС 1,5o- 3o ошибка в 0,5o не приводит к выходу цели за время экстраполяции из зоны приема отраженного сигнала по угловым координатам.
Дальность изменяется согласно уравнениям
где au, aц - ускорение истребителя и цели. (И.А.Богусловский. Методы навигации и управления по неполной статистической информации. М., "Машиностроение", 1970 г., стр. 16). При запоминании  при экстраполяции D ошибка в экстраполяции координат будет обусловлена величиной
при экстраполяции D ошибка в экстраполяции координат будет обусловлена величиной  . На больших дальностях, где величина (Dω
. На больших дальностях, где величина (Dω определяется ускорением цели.
определяется ускорением цели.
При aц = 40 м/с2 и времени экстраполяции tэ= 5 с. Ошибка экстраполяции достигнет
что соизмеримо с половиной периода повторения в режиме высокой частоты повторения и приводит к попаданию отраженного сигнала цели в зону запирания приемника БРЛС и к незахвату цели по дальности после выхода ее из зоны интенсивных отражений ПП.
Процесс экстраполяции доплеровской частоты при пропадании сигнала зависит от астатизма следящей системы по fg.
Если используется следящая система c астатизмом первого порядка, то экстраполированная координата fg является последней запомненной величиной.
При знакопостоянном ускорении цели 50 м/с2, что соответствует при длине волны 3 см - 3 кГц/с, за время 4-5 с доплеровская частота изменится на 12-15 кГц, цель окажется вне полосы пропускания следящих устройств приемника БРЛС.
Если используется следящая система с астатизмом 2 порядка, то при пропадании сигнала на входе устройства слежения по fg экстраполированное значение fg будет меняться по линейному закону и при знакопостоянном маневре цели будет обеспечена точность экстраполяции fg, достаточная для перезахвата цели по fg.
Но могут быть тактические ситуации, когда цель в процессе прохождения зоны ПП сменит знак маневра и, войдя в зону ПП со стороны передней полусферы, выйдет из этой зоны также со стороны передней полусферы.
В этом случае экстраполяция fg по линейному закону приведет к потере цели.
Таким образом, при проходе ракурса 4/4 точности экcтраполяции по дальности и скорости сближения не обеспечивают возможность захвата цели без поиска после выхода ее из зоны ПП, что приводит к потери цели и срыву атаки цели при ее маневре с проходом ракурса 4/4.
Целью настоящего изобретения является обеспечение атаки целей на ракурсах, близких к 4/4.
Поставленная цель достигается тем, что в устройство, содержащее устройство слежения по угловым координатам, состоящее, например, из последовательно соединенных дискриминатора, первого управляющего ключа, интегратора устройства слежения по углам, блока контура стабилизации антенны, дальномера, состоящего из блока основной части и выходного интегратора, устройство слежения по доплеровской частоте с генератором переменной частоты, вычислителя частоты пассивных помех по главному лучу диаграммы направленности антенны, датчик скорости и угла атаки, причем входы вычислителя соединены с датчиками скорости, угла атаки и устройством слежения по угловым координатам, введены обнаружитель для различения точечной и протяженной цели, блок сравнения, выходы которых соединены со схемой "И", первый вход блока сравнения соединен с выходом вычислителя, а второй его вход соединен со входом генератора переменной частоты, сумматор, выход которого соединен со входом генератора переменной частоты, формирователь импульсов, выход которого соединен с первым входом сумматора, три управляющих ключа, управляющие входы которых, а также первого управляющего ключа и запускающий вход формирователя импульсов соединены с выходом схемы "И", сигнальный вход второго управляющего ключа соединен с выходом блока основной части дальномера, а его выход со входом выходного интегратора дальномера, сигнальный вход третьего управляемого ключа соединен с выходом устройства слежения по доплеровской частоте, а его выход с выходом генератора переменной частоты, сигнальный вход четвертого управляющего ключа соединен с выходом вычислителя, а выход соединен со вторым входом сумматора и входом выходного интегратора дальномера.
Поставленная цель предлагаемого изобретения - обеспечение атаки целей на ракурсах, близких к 4/4, достигается за счет:
- бессрывного сопровождения целей на ракурсах, близких к 4/4 при мощности сигнала, отраженного от целей, большей мощности ПП;
- ускоренного перезахвата целей без поиска по углам и дальности при выходе цели из зоны мешающих отражений ПП, когда мощность сигнала, отраженного от цели, меньше мощности ПП.
Введение в состав устройства обнаружителя для различения точечной и протяженной цели позволило обеспечить бессрывное сопровождение целей в тех случаях, когда на выходе обнаружителя отсутствует сигнал "отсутствие сопровождения одиночной цели". Поэтому при мощности отраженного сигнала от цели больше мощности сигнала ПП (даже при нахождении цели на ракурсе 4/4) устройства слежения по угловым координатам, дальности и доплеровской частоте будут сопровождать цель.
Появление на выходе обнаружителя сигнала "отсутствие сопровождения одиночной цели" свидетельствует о том, что сигналы ПП мощнее отраженного сигнала цели, а появление сигнала с выхода блока сравнения показывает, что цель находится вблизи ракурса 4/4. Следящие устройства по углам и дальности переходят в режим экстраполяции, имеющий наибольшую точность именно на ракурсе 4/4.
Устройство слежение по доплеровской частоте отключается, а на вход генератора переменной частоты поочередно поступают два заданных значения fg, осуществляя дискретный подпоиск цели по координате fg в ожидаемой области появления цели. При выходе цели из зоны интенсивных отражений как со стороны передней полусферы, так и со стороны задней полусферы она захватывается устройством без дополнительного поиска по углам и дальности.
На чертеже представлена блок-схема устройства.
Бортовая радиолокационная станция сопровождения целей содержит устройство слежения по углам, состоящее из углового дискриминатора 1, управляющего ключа 2, интегратора 3 и блока контура стабилизации антенны 4, дальномера, состоящего из основной части 7, управляющего ключа 8 и выходного интегратора 9, обнаружитель 6 устройство слежения по доплеровской частоте 11, управляющий ключ 12, генератор переменной частоты 13, вычислитель частоты ПП 5, схему "И" 10, блок сравнения 14, формирователь импульсов 15, выполненный, например, на микросхеме 533ЛАЗ, управляющий ключ 17, сумматор 16, датчик скорости истребителя 18 и датчик углов атаки 19.
При подходе цели к ракурсу 4/4 доплеровская частота цели на выходе устройства слежения по частоте fg 11 мало отличается от частоты ПП на выходе вычислителя 5, реализующего формулу (1), в этом случае на выходе блока сравнения 14 появится сигнал, поступающий на первый вход схемы "И" 10, на второй вход которой поступает сигнал с обнаружителя 6 в случае отсутствия сигнала одиночной цели.
Обнаружитель 6 может отличать цель от ПП по критерию длительности принятого приемником импульса. И может быть реализован в виде аналогового устройства (см. Справочник по радиолокации, под редакцией М. Скольника. М, Сов. радио, 1979, т.3, стр 172, рис. 2Г, 2В), или цифрового, когда на вход обнаружителя, состоящего, например, из трех стробов по дальности, длительность которых равна длительности зондирующего импульса, подается сигнал из приемника БРЛС.
Если  то принимается решение - сопровождается протяженная помеха.
то принимается решение - сопровождается протяженная помеха.
Ai - мощность сигнала на выходе;
i - того строба;
i = 1, 2, 3;
К - константа.
Наличие сигнала на выходе блока сравнения 14 и отсутствие сигнала на выходе обнаружителя 6 свидетельствует о том, что в районе ракурса 4/4 БРЛС сопровождает цель, отраженный сигнал от которой по мощности выше отраженного сигнала ПП.
На выходе схемы "И" 10 отсутствует сигнал, и устройства слежения сопровождают цель.
Таким образом, если мощность отраженного сигнала от цели выше мощности ПП, устройства слежения БРЛС при проходе ракурса 4/4 сопровождают цель без перехода в режим экстраполяции.
Наличие сигнала как на выходе блока сравнения 14, так и обнаружителя 6 свидетельствует о том, что при проходе ракурса 4/4 на входе следящих устройств БРЛС мощность отраженного сигнала от цели меньше мощности сигнала ПП. При этом появляется сигнал на выходе схемы "И" 10 и на управляющих входах управляющих ключей 2, 8, 17, а также на запускающем входе формирователя импульсов 15 появляется сигнал. При этом:
- в устройстве слежения по углам отключается сигнальный вход управляющего ключа 2 и сигнал с выхода углового дискриминатора 1 не поступает на вход интегратора 3, на выходе которого запоминается значение угловой скорости линии визирования, поступающее на вход блока контура стабилизации антенны 4. Устройство слежения по углам переходит в режим экстраполяции с запомненным значением угловой скорости линии визирования;
- в дальномере запирается сигнальный вход управляющего ключа 8, и на вход выходного интегратора 9 дальномера поступает через сигнальный вход управляющего ключа сигнал с выхода вычислителя 5, принимаемый за оценку скорости сближения на отрезке времени пребывания цели в зоне интенсивных отражений ПП.
Дальномер переходит в режим экстраполяции, реализуя уравнение
где DНЭ - дальность на выходе интегратора 9 в момент времени начала экстраполяции tНЭ;
vИД - проекция скорости истребителя на линию визирования.
Оценка на участке экстраполяции скорости сближения значением vИД значительно уменьшает ошибки экстраполяции D:
- при знакопостоянном маневре и его отсутствии они практически равны нулю;
- при знакопеременном маневре зависят от величины перегрузки цели при входе в зону ПП, момента перемены знака перегрузки, величины перегрузки выхода из зоны интенсивных отражений. Результаты проведенного математического моделирования показали, что ошибки экстраполяции в этих случаях не превосходят 150 м, что достаточно для беспомехового перезахвата цели по дальности при длительности импульса 1 мкс и больше;
- устройство слежения по доплеровской частоте 11 при подаче сигнала на управляющий вход управляющего ключа 12 отключается от генератора переменной частоты, на вход которого начинает поступать сигнал с выхода сумматора 16, при подаче сигнала на управляющий вход управляющего ключа 17 на первый вход сумматора 16 поступает с вычислителя 5 сигнал vИД, на второй вход сумматора поступает с формирователя импульсов 15, запускаемого выходным сигналом схемы "И" 10, знакопеременная последовательность импульсов амплитудой ± Δf, длительностью, равной τпер , Δf - определяется шириной спектра ПП; полосой приема следящих устройств БРЛС, точностью определения vИД, τпер - время, необходимое на перезахват цели - перехода из режима экстраполяции на режим непрерывного сопровождения.
Таким образом, при экстраполяции угловых координат цели и дальности осуществляется дискретный (две точки) поиск цели по доплеровской частоте.
При этом выход генератора переменной частоты 13 через время τпер меняется с fПП+Δf , что соответствует передней полусфере, на fПП-Δf , что соответствует задней полусфере.
При выходе цели из зоны интенсивных отражений на выходе обнаружителя 6 и, следовательно, схемы "И" 10 пропадает сигнал. Снимается сигнал с управляющих входов управляющих ключей 2, 8, 12, 17 и формирователя импульсов 15, обнуляются выходы сумматора 16 и управляющего ключа 17, устройства слежения по углам, дальности, доплеровской частоте переходят в режим сопровождения без поиска цели по дальности и угловым координатам.
Технико-экономический эффект предлагаемого изобретения в сравнении с прототипом заключается в следующем:
- использование обнаружителя для различения одиночных и протяженных целей при ракурсах атакуемых целей, близких к 4/4, вместо режекторного фильтра выгодно отличает предлагаемое устройство от прототипа, так как позволяет осуществить бессрывное непрерывное сопровождение целей на ракурсах 4/4 при мощности сигнала, отраженного от цели, большей мощности пассивных помех по главному лучу диаграммы направленности антенны;
- введение дискретного подпоиска цели по fg в районе доплеровских частот, соответствующих частоте отражений от ПП, мощность которых выше мощности сигнала, отраженного от цели, позволяет осуществить без поиска захват цели, вышедшей из зоны интенсивных отражений ПП как со стороны передней полусферы, так и задней при совершении целью как знакопостоянного, так и знакопеременного маневра во время пребывания ее в зоне ПП;
- использование наряду с экстраполяцией угловых координат с запомненными значениям угловой скорости линии визирования экстраполяции дальности при оценке скорости сближения значением проекции скорости истребителя на линию визирования при мощности ПП большей мощности сигнала от цели позволяет осуществить захват цели без поиска как по угловым координатам, как и по дальности после выхода цели из зоны интенсивности отражений ПП.
Таким образом, предлагаемое изобретение позволяет осуществить беспрерывное сопровождение целей, совершающих произвольный маневр на ракурсах, близких 4/4, что значительно расширяет тактические возможности перехватчика - позволяет осуществить всеракурсную атаку целей на фоне Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА ВЫБОРКОЙ АМПЛИТУД | 1997 |
|
RU2117963C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
Изобретение относится к радиолокации и может использоваться в бортовых импульсно-доплеровских радиолокационных станциях. Радиолокационная станция содержит устройство слежения по углам, состоящее из углового дискриминатора, управляющего ключа, интегратора, блока контура стабилизации антенны, дальномера, состоящего из основной части, управляющего ключа и выходного интегратора, устройство слежения по доплеровской частоте, обнаружитель, управляющий ключ, генератор переменной частоты, вычислитель частоты, вычислитель частоты пассивной помехи, схему И, блок сравнения, формирователь импульсов, сумматор, датчик скорости и датчик угла атаки. Технический результат заключается в осуществлении беспрерывного сопровождения целей, совершающих произвольный маневр. 1 ил.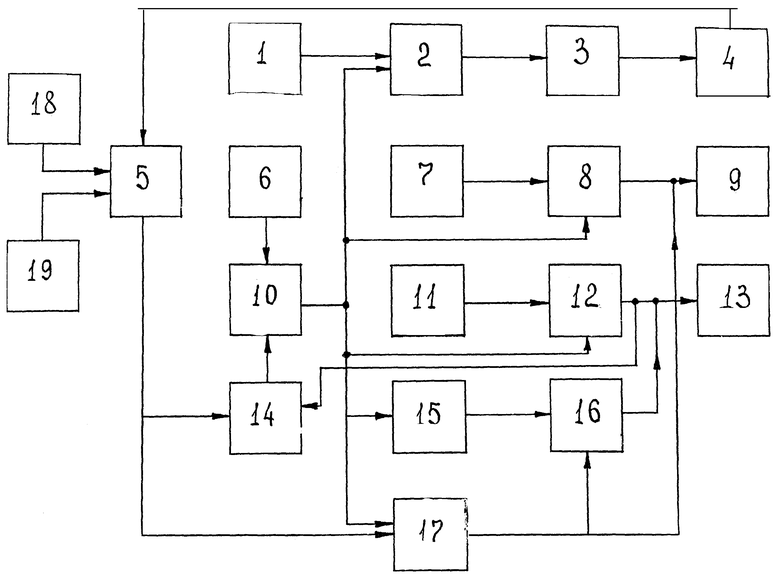
Бортовая радиолокационная станция сопровождения целей, содержащая антенну, соединенную через антенный переключатель с передатчиком и приемником, устройство слежения по углам, состоящее из последовательно соединенных углового дискриминатора, первого управляющего ключа, интегратора и блока контура стабилизации, устройство слежения по дальности, состоящее из дальномера и выходного интегратора, устройство слежения по доплеровской частоте с генератором переменной частоты, вычислитель частоты пассивной помехи, датчик скорости, датчик угла атаки, причем первые два входа вычислителя частоты пассивной помехи соединены с выходом датчика скорости, выходом датчика угла атаки, а третий вход - с выходом блока контура стабилизации антенны, выход приемника соединен со входом устройства слежения по доплеровской частоте, входом дальномера, входом углового дискриминатора, а первый и второй входы приемника соответственно соединены с выходами генератора переменной частоты и выходом выходного интегратора, отличающаяся тем, что, с целью обеспечения всеракурсного сопровождения целей, в него введены схемы И, обнаружитель протяженной помехи и блок сравнения, выходы которых соединены со входами схемы И, первый вход блока сравнения соединен с выходом вычислителя частоты пассивной помехи, а второй его вход соединен со входом генератора переменной частоты, вход обнаружителя протяженной помехи соединен с выходом приемника, сумматор, выход которого соединен со входом генератора переменной частоты, формирователь импульсов, выход которого соединен с первым входом сумматора, второй, третий и четвертый управляющие ключи, управляющие входы которых соединены с управляющим входом первого ключа, запускающим входом формирователя импульсов и выходом схемы И, сигнальный вход второго управляющего ключа соединен с выходом дальномера, а его выход - со входом выходного интегратора устройства слежения по дальности, сигнальный вход третьего управляющего ключа соединен с выходом устройства слежения по доплеровской частоте, а его выход - со входом генератора переменной частоты, сигнальный вход четвертого управляющего ключа соединен с выходом вычислителя частоты пассивной помехи, а выход соединен со вторым входом сумматора и входом выходного интегратора устройства слежения по дальности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Справочник по радиолокации /Под ред.М.Сколника | |||
| - М.: Сов.радио, 1979, т.3, с.369 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Белоцерковский Г.Б | |||
| Основы радиолокации и радиолокационные устройства | |||
| - М.: Сов.радио, 1975, с.175 - 179. | |||
