Изобретение относится к области измерительной техники, а именно к комплексным преобразователям параметров движения.
Известен преобразователь инерциальной информации [1] , содержащий корпус, чувствительный элемент с тремя степенями свободы линейного перемещения и тремя степенями свободы углового перемещения, следящую систему по каждой оси линейного перемещения, содержащую емкостный преобразователь линейного перемещения, усилитель и электростатический силовой преобразователь, следящую систему каждой оси углового перемещения, содержащую емкостный преобразователь углового перемещения, усилитель и электростатический моментный преобразователь.
Наиболее близким по технической сущности является преобразователь инерциальной информации [2] , содержащий корпус, установленный в нем чувствительный элемент с тремя степенями свободы линейного перемещения и тремя степенями свободы углового перемещения, следящую систему по каждой оси линейного перемещения, содержащую преобразователь линейного перемещения, усилитель и магнитоэлектрический силовой преобразователь с постоянными магнитами и компенсационной обмоткой, следящую систему по каждой оси углового перемещения, содержащую преобразователь углового положения, усилитель и магнитоэлектрический моментный преобразователь с постоянными магнитами и компенсационной обмоткой.
Недостатком такого преобразователя инерциальной информации является ограничение измеряемых параметров движения до измерения линейных и угловых ускорений.
Техническим результатом изобретения является расширение функциональных возможностей преобразователя инерциальной информации за счет измерения угловой скорости в дополнение к измеряемым линейным и угловым ускорениям.
Данный технический результат достигается в преобразователе инерциальной информации, содержащем корпус, установленный в нем чувствительный элемент с тремя степенями свободы линейного перемещения и тремя степенями свободы углового перемещения, следящую систему по каждой оси линейного перемещения, содержащую преобразователь линейного перемещения, усилитель и магнитоэлектрический силовой преобразователь с постоянными магнитами и компенсационной обмоткой, следящую систему по каждой оси углового перемещения, содержащую преобразователь углового перемещения, усилитель и магнитоэлектрический моментный преобразователь с постоянными магнитами и компенсационной обмоткой, тем, что в него введен источник переменного сигнала с одним или двумя выходами с частотой выходного напряжения, не большей частоты среза следящей системы по оси углового перемещения, по крайней мере в одну следящую систему по оси углового перемещения введен усилитель постоянного тока и фазовый детектор; в следящей системе углового перемещения с введенными усилителем постоянного тока и фазовым детектором выход усилителя посредством первого резистора соединен с входом усилителя постоянного тока, к точке соединения первого резистора с выходом усилителя подключен вход фазового детектора, один выход источника переменного сигнала посредством второго резистора подключен к точке соединения первого резистора с входом усилителя постоянного тока, тот же выход или другой из выходов источника переменного сигнала подключен к входу опорного напряжения фазового детектора, к выходу усилителя постоянного тока подключена компенсационная обмотка магнитоэлектрического моментного преобразователя данной следящей системы по оси углового перемещения.
В одном частном случае выполнения преобразователя инерциальной информации подаваемое на вход опорного напряжения фазового детектора напряжение отличается по фазе на 90o по сравнению с подаваемым на вход усилителя постоянного тока напряжением от источника переменного сигнала.
В другом частном случае выполнения преобразователя инерциальной информации напряжение с частотой источника переменного сигнала на выходе усилителя и напряжение, подаваемое на вход опорного напряжения фазового детектора, равны.
Путем введения в преобразователь инерциальной информации источника переменного сигнала с частотой выходного напряжения, не большей частоты среза следящей системы по оси углового перемещения, введения в следящую систему по оси углового перемещения усилителя постоянного тока и фазового детектора, соединения выхода усилителя посредством первого резистора с входом усилителя постоянного тока, подключения к точке соединения первого резистора с выходом усилителя входа фазового детектора, подключения выхода источника переменного сигнала к входу опорного напряжения фазового детектора и посредством второго резистора к точке соединения первого резистора с входом усилителя постоянного тока, подключения к выходу усилителя постоянного тока компенсационной обмотки магнитоэлектрического моментного преобразователя обеспечивается отработка следящей системой угловой скорости по измерительной оси, совпадающей с измерительной осью углового ускорения.
В результате посредством преобразователя инерциальной информации дополнительно к измерению линейных и угловых ускорений производится измерение угловой скорости, что приводит к расширению его функциональных возможностей.
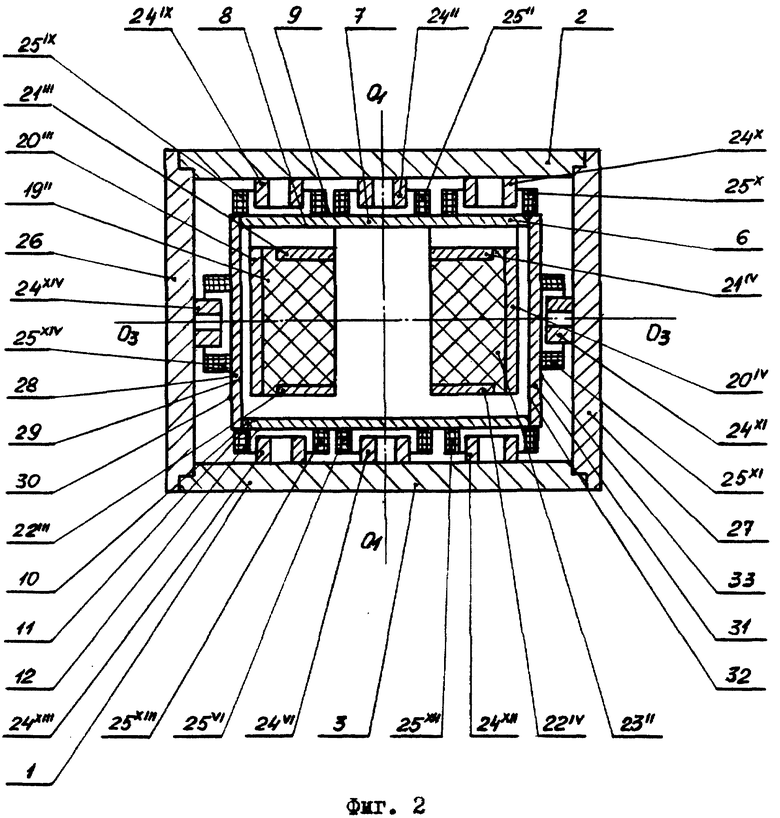
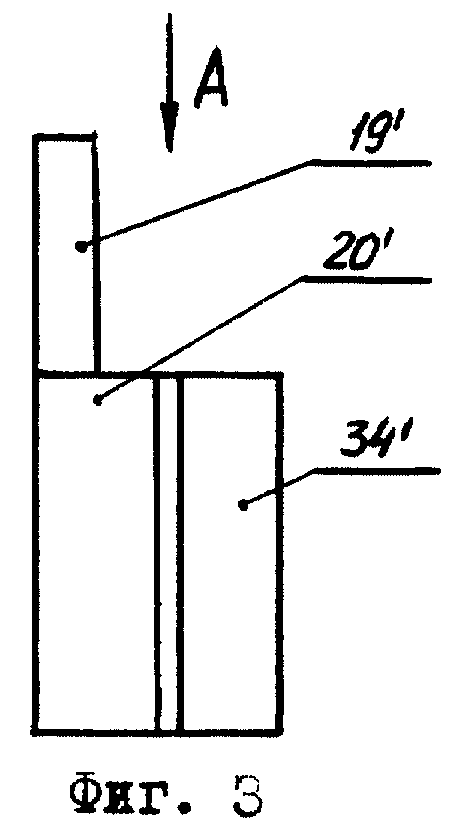
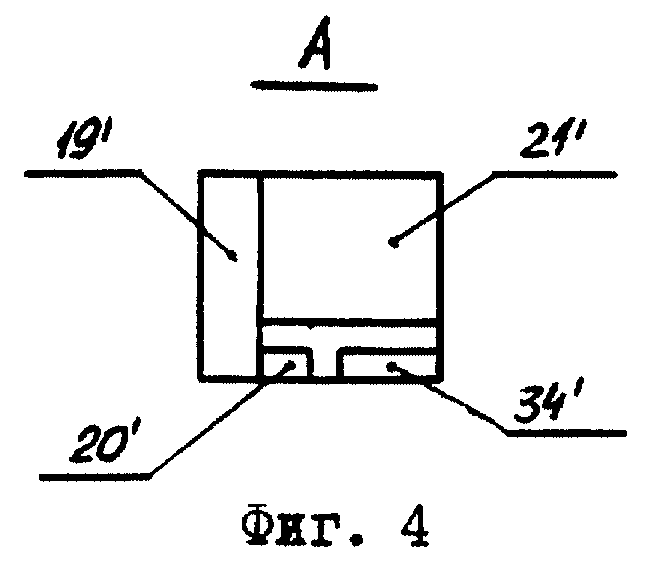
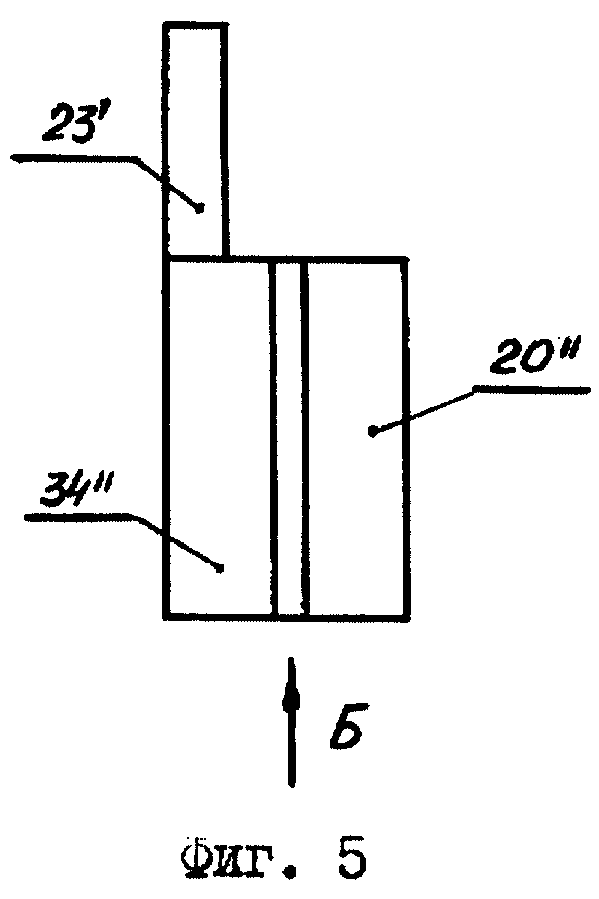
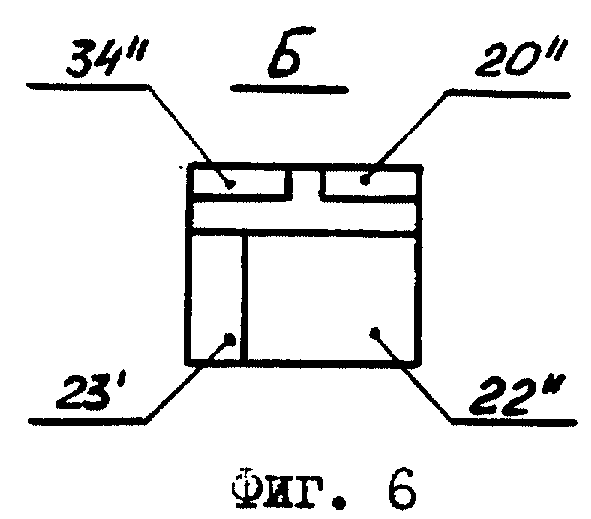
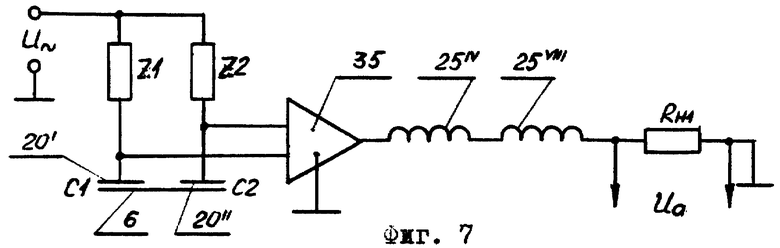
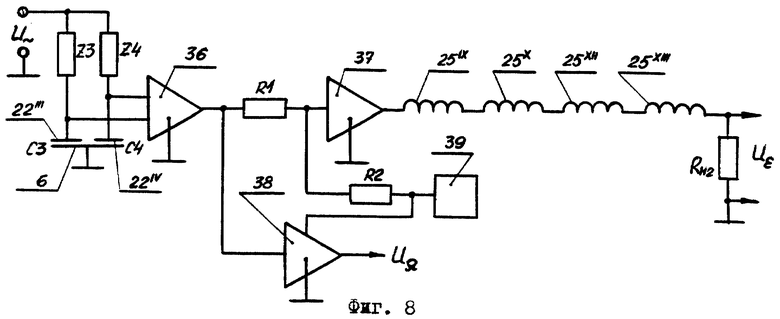
На фиг. 1 представлена фронтальная проекция преобразователя инерциальной информации, на фиг. 2 - профильная проекция преобразователя инерциальной информации, на фиг. 3. . . 6 - виды блоков электродов емкостных преобразователей линейных и угловых перемещений, на фиг. 7 - электрическая схема следящей системы по одной из осей линейного перемещения, на фиг. 8 - электрическая схема следящей системы по одной из осей углового перемещения.
Преобразователь инерциальной информации (фиг. 1) с емкостными преобразователями линейных и угловых перемещений содержит корпус 1 с первой торцевой частью 2, второй торцевой частью 3, первой боковой частью 4 и второй боковой частью 5. В корпусе 1 установлен чувствительный элемент 6 из электропроводного материала с первой торцевой гранью 7 с внутренней 8 и внешней 9 поверхностями, с второй торцевой гранью 10 с внутренней 11 и внешней 12 поверхностями. Чувствительный элемент 6 также образуют первая боковая грань 13 с внутренней 14 и внешней 15 поверхностями, вторая боковая грань 16 с внутренней 17 и внешней 18 поверхностями.
Блок электродов 19I с первым неподвижным электродом 20I, вторым неподвижным электродом 21I и третьим неподвижным электродом 22I расположен во внутреннем объеме чувствительного элемента 6 и прикреплен к корпусу 1. Первый неподвижный электрод 20I расположен напротив внутренней поверхности 14 первой боковой грани 13, второй неподвижный электрод 21I расположен напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22I расположен напротив внутренней поверхности 11 второй торцевой грани 10.
Также во внутреннем объеме чувствительного элемента расположен блок электродов 23I. Его первый неподвижный электрод 20II расположен напротив внутренней поверхности 17 второй боковой грани 16. второй неподвижный электрод 21II расположен напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22II расположен напротив внутренней поверхности 11 второй торцевой грани 10.
В корпусе 1 установлены постоянные магниты 24I, 24II. . . 24VIII с радиальным направлением намагниченности. На внешних поверхностях 9, 18, 12, 15 соответственно граней 7, 16, 10, 13 чувствительного элемента 6 расположены кольцевые секции 25I, 25II. . . 25VIII компенсационных обмоток.
Постоянный магнит 24II с секцией 25II и постоянный магнит 24VI с секцией 25VI компенсационной обмотки образуют магнитоэлектрический силовой преобразователь следящей системы по оси O1-O1 линейного перемещения. Постоянные магниты 24I, 24III, 24V, 24VII вместе с секциями 25I, 25III, 25V, 25VII компенсационной обмотки образуют магнитоэлектрический моментный преобразователь следящей системы по оси углового перемещения, перпендикулярной осям O1-O1 и O2-O2.
Постоянными магнитами 24IV, 24VIII с секциями 25IV, 25VIII компенсационной обмотки образован магнитоэлектрический силовой преобразователь следящей системы по оси O2-O2 линейного перемещения.
В профильной проекции (фиг. 2) преобразователя инерциальной информации в корпусе 1 с третьей боковой частью 26 и четвертой боковой частью 27 во внутренним объеме чувствительного элемента 6, образованном первой торцевой гранью 7, второй торцевой гранью 10, третьей боковой гранью 28 с внутренней поверхностью 29 и внешней поверхностью 30, четвертой боковой гранью 31 с внутренней поверхностью 32 и внешней поверхностью 33, расположены блоки электродов 19II, 23II. Первый неподвижный электрод 20III блока электродов 19II расположен напротив внутренней поверхности 29 третьей боковой грани 28, первый неподвижный электрод 20IV блока электродов 23II расположен напротив внутренней поверхности 32 четвертой боковой грани 31. Вторые электроды 21III, 21IV блоков электродов 19II, 23II расположены напротив внутренней поверхности 8 первой торцевой грани 7, третьи электроды 22III, 22IV расположены напротив внутренней поверхности 11 второй торцевой грани 10.
В корпусе 1 установлены постоянные магниты 24IX. . . 24XIV. На внешних поверхностях 9, 33, 13, 30 соответственно граней 7, 31, 10, 28 расположены секции 25IX. . . 25XIV компенсационных обмоток.
Постоянный магнит 24XI с секцией 25XI и постоянный магнит 24XIV с секцией 25XIV компенсационной обмотки образуют магнитоэлектрический силовой преобразователь следящей системы по оси O3-O3 линейного перемещения. Постоянные магниты 24IX, 24X, 24XII, 24XIII с секциями 25IX, 25X, 25XII, 25XIII компенсационной обмотки образуют магнитоэлектрический моментный преобразователь следящей системы относительно оси O2-O2 углового перемещения.
Аналогично посредством выполнения, на внешней поверхности 15 первой боковой грани 13 и на внешней поверхности 18 второй боковой грани 16 секции компенсационной обмотки и расположения на корпусе 1 постоянных магнитов образуется магнитоэлектрический моментный преобразователь следящей системы относительно оси O1-O1 углового перемещения.
В блоках электродов 19I, 23I (фиг. 3. . . 6) выполнены соответственно первые неподвижные электроды 20I, 20II, вторые неподвижные электроды 21I, 21II, третьи неподвижные электроды 22I, 22II и четвертые неподвижные электроды 34I, 34II в виде, например, металлизированных участков. Аналогичные неподвижные электроды 20III, 20IV, 21III, 21IV, 22III, 22IV, 34III, 34IV образованы в блоках электродов 19II, 23II.
Следящая система по оси O2-O2 линейного перемещения (фиг. 7) содержит выполненный по мостовой схеме емкостный преобразователь линейного перемещения с плечами Z1, Z2 и конденсаторами C1 и C2, из которых конденсатор C1 образован первым неподвижным электродом 20I емкостного преобразователя линейного перемещения и подвижным электродом в виде электропроводной поверхности чувствительного элементы 6, а конденсатор C2 образован первым неподвижным электродом 20II и электропроводной поверхностью чувствительного элемента 6. Выход преобразователя, линейного перемещения соединен с входом усилителя 35, к выходу которого подключены секции 25IV, 25VIII компенсационной обмотки магнитоэлектрического силового преобразователя. Преобразователь линейного перемещения запитывается переменным напряжением u~. Выходным сигналом следящей системы по оси O2-O2 линейного перемещения является напряжение Ua на резисторе RH1.
Аналогично выполнена следящая система по оси O3-O3 линейного перемещения, в которой в схему включены первые неподвижные электроды 20III, 20IV и секции 25XI, 25XIV компенсационной обмотки.
В следящей системе по оси O1-O1 линейного перемещения конденсатор C1 образован соединенными вместе третьими неподвижными электродами 22I, 22II и электропроводной поверхностью чувствительного элемента 6, а конденсатор C2 - соединенными вместе вторыми неподвижными электродами 21III, 21IV и электропроводной поверхностью чувствительного элемента 6. К выходу усилителя подключены секции 25II, 25VII компенсационной обмотки магнитоэлектрического силового преобразователя.
В следящей системе углового перемещения относительно оси O2-O2 (фиг. 8) в выполненном по мостовой схеме емкостном преобразователе углового перемещения с плечами Z3, Z4 и конденсаторами C3, C4 конденсатор C3 образован третьим неподвижным электродом 22IV и электропроводной поверхностью чувствительного элемента 6, конденсатор C4 - третьим неподвижным электродом 22IV и электропроводной поверхностью чувствительного элемента 6. Выход емкостного преобразователя углового перемещения подключен к входу усилителя 36, к выходу которого подключен вход усилителя постоянного тока 37 посредством первого резистора R1. Точка соединения первого резистора R1 с выходом усилителя 36 подключена к входу фазового детектора 38, выходом которого является напряжение uΩ, пропорциональное измеряемой угловой скорости. Выход источника переменного сигнала 39 подключен к входу опорного напряжения фазового детектора 38 и посредством второго резистора R2 к точке соединения первого резистора R1 с входом усилителя постоянного тока 37, к выходу которого подключены секции 25IX, 25X, 25XII, 25XIII компенсационной обмотки магнитоэлектрического моментного преобразователя следящей системы углового перемещения относительно оси O2-O2.
Усилитель постоянного тока 37 может быть выполнен с любым коэффициентом преобразования по напряжению, в том числе и равным 1.
Фазовый детектор 38 может быть выполнен, например, по балансной схеме.
В источнике переменного сигнала 39 может быть выполнен второй выход для подключения к входу опорного напряжения фазового детектора 38. Фаза напряжения с второго выхода источника переменного сигнала 39 может отличаться на 90o по сравнению с фазой напряжения на первом выходе источника переменного сигнала 39.
Напряжения с выходов источника переменного сигнала, сопротивления второго резистора R2, коэффициенты преобразования звеньев следящей системы углового положения могут быть выполнены такими, чтобы напряжение с выхода усилителя 36 и напряжение, подаваемое на вход опорного напряжения фазового детектора 38, были равны.
В следящей системе углового перемещения относительно оси O3-O3 в схему включены вторые неподвижные электроды 21I, 21II и секции 25I, 25III, 25V, 25VII компенсационной обмотки.
В следящей системе углового перемещения относительно оси O1-O1 в емкостном преобразователе углового перемещения конденсатор C3 образован соединенными вместе четвертыми неподвижными электродами 34I, 34III и электропроводной поверхностью чувствительного элемента 6, конденсатор C4 - соединенными вместе четвертыми неподвижными электродами 34II, 34IV и электропроводной поверхностью чувствительного элемента 6.
По схеме, аналогичной схеме фиг. 8, могут быть выполнены следящие системы углового перемещения относительно одной, двух или трех осей.
В том случае, если в следящую систему углового перемещения относительно какой-либо оси не введены усилитель постоянного тока 37 и фазовый детектор 38, секции компенсационной обмотки магнитоэлектрического моментного преобразователя подключаются к выходу усилителя 36.
Преобразователь инерциальной информации работает следующим образом. При наличии линейного ускорения, например, по оси O2-O2 (фиг. 7), происходит поступательное перемещение чувствительного элемента 6 вдоль оси O2-O2, при этом изменяются емкости конденсаторов C1, C2, и с выхода преобразователя линейного перемещения на вход усилителя. 35 поступает сигнал рассогласования следящей системы линейного перемещения. После преобразования и усиления сигнал с выхода усилителя 35 подается в секции 25IV, 25VIII компенсационной обмотки магнитоэлектрического силового преобразователя. За счет проходящего через секции 25IV, 25VIII компенсационной обмотки тока восстанавливается баланс следящей системы, в результате чего падение напряжения Ua на резисторе RH1 пропорционально линейному ускорению по оси O2-O2.
Аналогичным образом производится измерение линейных ускорений по осям O1-O1 и O2-O2.
При наличии углового ускорения относительно оси O2-O2 (фиг. 8), происходит угловое перемещение чувствительного элемента 6 относительно оси O2-O2, емкости конденсаторов C3, C4 изменяются, и с выхода датчика углового перемещения на вход усилителя 36 подается сигнал рассогласования следящей системы углового перемещения. После его преобразования и усиления сигнал с выхода усилителя 36 подается на вход усилителя постоянного тока 37, с выхода которого напряжение подается на секции 25IX, 25X, 25XII, 25XIII компенсационной обмотки магнитоэлектрического моментного преобразователя. За счет проходящего через них тока восстанавливается баланс следящей системы углового перемещения относительно оси O2-O2, и на резисторе RH2 получается падение напряжения uε, пропорциональное угловому ускорению относительно оси O2-O2.
Вследствие поступающего на вход усилителя постоянного тока 37 переменного выходного напряжения от источника переменного сигнала 39 с выхода усилителя постоянного тока 37 на секции 25IX, 25X, 25XII, 25XIII компенсационной обмотки магнитоэлектрического моментного преобразователя подается напряжение переменного тока. При этом проходящий через секции 25IX, 25X, 25XII, 25XIII переменный ток вызывает действующий на чувствительный элемент 6 переменный момент относительно оси O2-O2, приводящий к вынужденным колебаниям чувствительного элемента 6. При наличии угловой скорости относительно оси O2-O2 и вынужденных колебаниях чувствительного элемента 6 относительно этой же оси чувствительный элемент 6 в своих колебаниях относительно корпуса 1 будет достигать положения равновесия инерционных и компенсационных сил раньше в направлении, когда из скорости вынужденного колебательного движения чувствительного элемента 6 вычитается угловая скорость корпуса 1, и позже, когда они совпадают, что выражается в пропорциональном изменении фазы переменного напряжения с частотой выходного напряжения источника переменного сигнала 39 на выходе усилителя 36 относительно опорного напряжения на входе фазового детектора 38. В результате преобразования в фазовом детекторе 38 отличающихся по фазе напряжения с выхода усилителя 36 и напряжения на входе опорного напряжения фазового детектора 38 на выходе фазового детектора 38 образуется напряжение uΩ, изменяющееся, в функции от угловой скорости по оси O2-O2.
Таким образом, кроме углового ускорения преобразователь инерциальной информации осуществляет измерение и угловой скорости.
Чтобы обеспечить необходимую разрешающую способность измерения угловой скорости, частота выходного напряжения источника переменного сигнала 39 должна быть не больше частоты среза следящей системы углового перемещения по соответствующей измерительной оси. При подаче на вход усилителя постоянного тока 37 и на вход опорного напряжения фазового детектора 38 отличающихся по фазе на 90o напряжений зависимость выходного напряжения uΩ фазового детектора 38 от фазы выражается в функции синуса фазового сдвига.
При условии равенства напряжений с выхода усилителя 36 и напряжения на входе опорного напряжения фазового детектора 38 обеспечивается линейная зависимость выходного напряжения uΩ фазового детектора 38 от угловой скорости.
В зависимости от того, в какие следящие системы углового перемещения введены усилитель постоянного тока и фазовый демодулятор, измерение угловой скорости может осуществляться по одной, двум или трем осям.
Таким образом, посредством преобразователя инерциальной информации производится измерение линейных ускорений по трем ортогональным осям, угловых ускорений относительно этих же осей и угловых скоростей относительно любого количества из этих трех осей.
Источники информации
1. Патент Франции N 2511509 кл. G 01 P 15/125. Трехосный акселерометр с электростатическим подвесом крестовидной контрольной массы.
2. Патент США N 4711125 кл. G 01 C 21/12, НКИ 73/510, 73/517. Инерциальное измерительное устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
Изобретение относится к области измерительной техники, а именно к комплексным преобразователям параметров движения. Техническим результатом является расширение функциональных возможностей преобразователя за счет измерения угловой скорости в дополнение к измеряемым линейным и угловым ускорениям. Преобразователь содержит корпус, установленный в нем чувствительный элемент с тремя степенями свободы как линейного, так и углового перемещений, следящие системы линейных и угловых перемещений с преобразователями перемещений, усилителями и магнитоэлектрическими силовыми и моментными преобразователями. По крайней мере в одну следящую систему углового перемещения введены включенный последовательно с усилителем усилитель постоянного тока и фазовый детектор, подключенный входом к выходу усилителя. Источник переменного сигнала подключен к входу усилителя постоянного тока и к входу опорного напряжения фазового детектора. 2 з. п. ф-лы, 8 ил.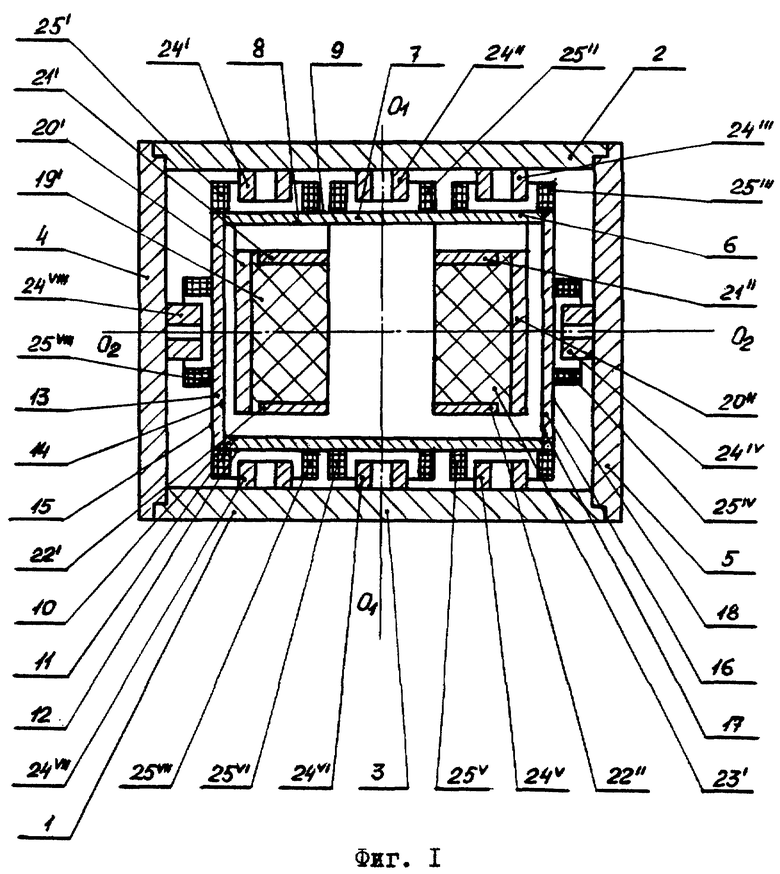
| US 4711125, 08.12.1987 | |||
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1993 |
|
RU2046350C1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

