Данное изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейных и угловых ускорений.
Известен преобразователь инерциальной информации, содержащий основание, чувствительный элемент с шестью степенями свободы, емкостные преобразователи линейного и углового положений, электростатические силовые преобразователи, усилители, к входам которых подключены выходы преобразователей положения, а к выходам - электростатические силовые преобразователи [1].
Такой преобразователь инерциальной информации имеет малый диапазон измерений вследствие ограничения величины напряжения, прилагаемого к электростатическому силовому преобразователю на верхнем пределе измерения.
Наиболее близким по технической сущности является преобразователь инерциальной информации [2], содержащий основание, чувствительный элемент в форме параллелепипеда или куба с степенями линейного и углового перемещений относительно трех ортогональных осей, датчики линейного и углового положений относительно каждой оси с неподвижными электродами емкостных преобразователей в основании и подвижным электродом в виде электропроводной поверхности чувствительного элемента, магнитоэлектрические силовые преобразователи в цепи обратной связи преобразователей линейного и углового ускорений по каждой оси, фазочувствительный усилитель для каждого датчика линейного и углового положений по каждой оси.
Недостатком данного преобразователя инерциальной информации является недостаточная компактность конструкции вследствие малой эффективности использования объема.
Техническим результатом изобретения является уменьшение габаритов преобразователя инерциальной информации за счет использования внутреннего объема чувствительного элемента для установки элементов преобразователя инерциальной информации.
Данный технический результат достигается в преобразователе инерциальной информации, содержащем основание, чувствительный элемент в форме параллелепипеда или куба с степенями линейного и углового перемещений относительно трех ортогональных осей, датчики линейного и углового положений относительно каждой оси с неподвижными электродами емкостных преобразователей в основании и подвижным электродом в виде электропроводной поверхности чувствительного элемента, магнитоэлектрические силовые преобразователи в цепи обратной связи преобразователей линейного и углового ускорений по каждой оси, фазочувствительный усилитель для каждого датчика линейного и углового положений по каждой оси, тем, что по крайней мере в одной паре параллельных друг другу граней чувствительного элемента в каждом углу грани выполнено окно, через окна в гранях введены неподвижные электроды емкостных преобразователей, ориентированные относительно внутренних поверхностей чувствительного элемента.
Выполнение окон в углах граней чувствительного элемента, введение в них неподвижных электродов емкостных преобразователей с ориентацией относительно внутренних поверхностей чувствительного элемента приводит к уменьшению габаритных размеров преобразователя инерциальной информации вследствие использования внутреннего объема чувствительного элемента для размещения неподвижных электродов емкостных преобразователей преобразователя инерциальной информации.
На фиг. 1 представлена фронтальная проекция преобразователя инерциальной информации, на фиг. 2 - профильная проекция преобразователя инерциальной информации, на фиг. 3-6 - виды блоков электродов, на фиг. 7, 8 - виды чувствительного элемента, на фиг. 9, 10 - электрические схемы преобразователей линейного ускорения, на фиг. 11, 12 - электрические схемы преобразователей углового ускорения.
Преобразователь инерциальной информации содержит основание 1 (фиг. 1) с первой торцевой частью 2, второй торцевой частью 3, первой боковой частью 4 и второй боковой частью 5. В основании 1 установлен чувствительный элемент 6 из электропроводного материала с первой торцевой гранью 7 с внутренней 8 и внешней 9 поверхностями, с второй торцевой гранью 10 с внутренней 11 и внешней 12 поверхностями. Чувствительный элемент 6 также образуют первая боковая грань 13 с внутренней 14 и внешней 15 поверхностями, вторая боковая грань 16 с внутренней 17 и внешней 18 поверхностями.
Блок электродов 19I' с первым неподвижным электродом 20I, вторым неподвижным электродом 21I и третьим неподвижным электродом 22I расположен во внутреннем объеме чувствительного элемента 6 и прикреплен к основанию 1. Первый неподвижный электрод 20I расположен напротив внутренней поверхности 14 первый боковой грани 13, второй неподвижный электрод 21I расположен напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22I расположен напротив внутренней поверхности 11 второй торцевой грани 10.
Также во внутреннем объеме чувствительного элемента расположен блок электродов 23I. Его первый неподвижный электрод 20II расположен напротив внутренней поверхности 17 второй боковой грани 16, второй неподвижный электрод 21II расположен напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22II расположен напротив внутренней поверхности 11 второй торцевой грани 10.
На основании 1 установлены постоянные магниты 24I, 24II - 24VIII с радиальным направлением намагниченности. На внешних поверхностях 9, 18, 12, 15 соответственно граней 7, 16, 10, 13 чувствительного элемента 6 расположены кольцевые компенсационные катушки 25I, 25II - 25VIII.
Постоянный магнит 24II с компенсационной катушкой 25II и постоянный магнит 24VI с компенсационной катушкой 25VI образуют магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя линейного ускорения по оси О1 - O1. Постоянные магниты 24I, 24III, 24V, 24VII вместе с соответствующими компенсационными катушками 25I, 25III, 25V, 25VII образуют магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя углового ускорения относительно оси, перпендикулярной осям O1 - О1 и O2 - O2.
Постоянными магнитами 24IV, 24VIII с компенсационными катушками 25IV, 25VIII образован магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя линейного ускорения по оси O2 - О2.
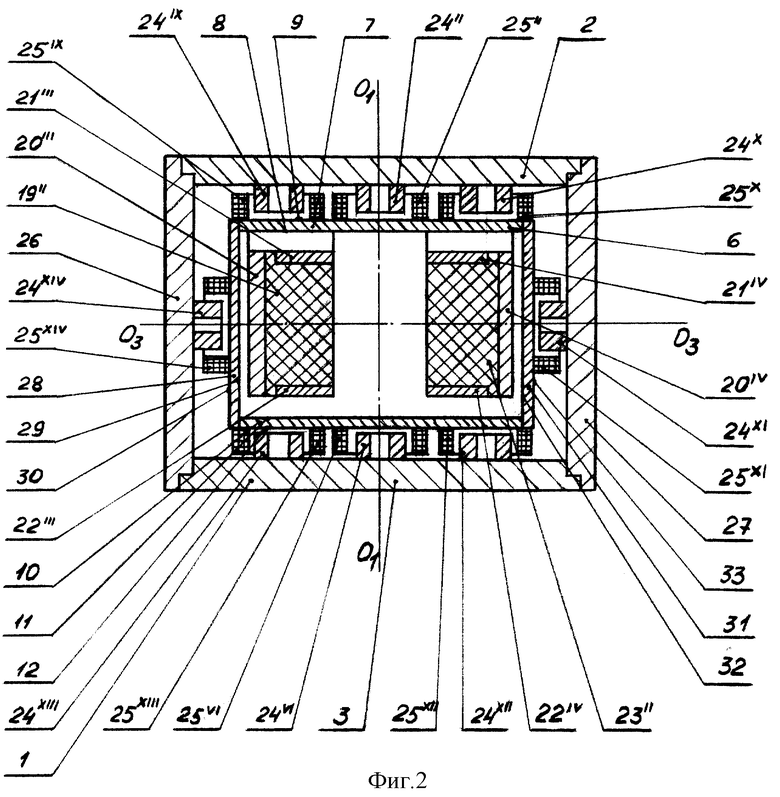
В профильной проекции (фиг. 2) преобразователя инерциальной информации в основании 1 с третьей боковой частью 26 и четвертой боковой частью 27 во внутреннем объеме чувствительного элемента 6, образованном первой торцевой гранью 7, второй торцовой гранью 10, третьей боковой гранью 28 с внутренней поверхностью 29 и внешней поверхностью 30, четвертой боковой гранью 31 с внутренней поверхностью 32 и внешней поверхностью 33, расположены блоки электродов 19II, 23II. Первый неподвижный электрод 20III блока электродов 19II расположен напротив внутренней поверхности 29 третьей боковой грани 28, первый неподвижный 20IV блока электродов 23II расположен напротив внутренней поверхности 32 четвертой боковой грани 31. Вторые электроды 21III, 21IV блоков электродов 19II, 23II расположены напротив внутренней поверхности 8 первой торцевой грани 7, третьи электроды 22III, 22IV расположены напротив внутренней поверхности 11 второй торцевой грани 10.
На основании 1 установлены постоянные магниты 24IX - 24XIV. На внешних поверхностях 9, 33, 18, 30 соответственно граней 7, 31, 10, 28 расположены компенсационные катушки 25IX - 25XIV.
Постоянный магнит 24XI с компенсационной катушкой 25XI и постоянный магнит 24XIV с компенсационной катушкой 25XIV образуют магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя линейного ускорения по оси O3 - O3. Постоянные магниты 24IX, 24X, 24XII, 24XIII с компенсационными катушками 25IX, 25X, 25XII, 25XIII образуют магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя углового ускорения относительно оси O2 - O2.
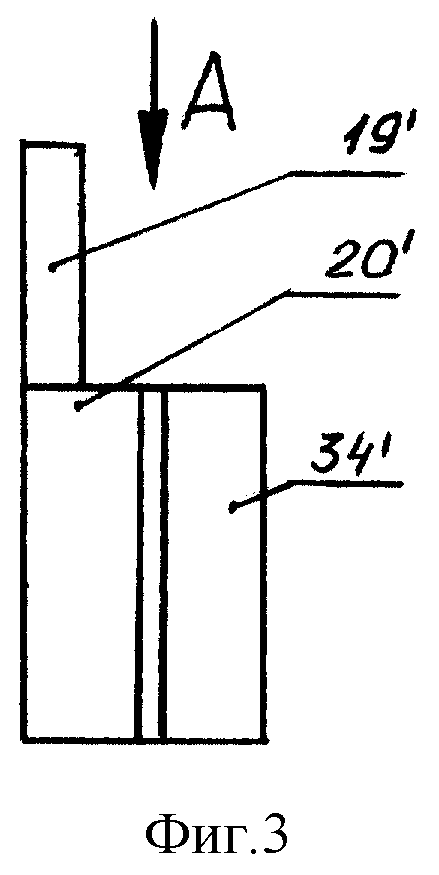
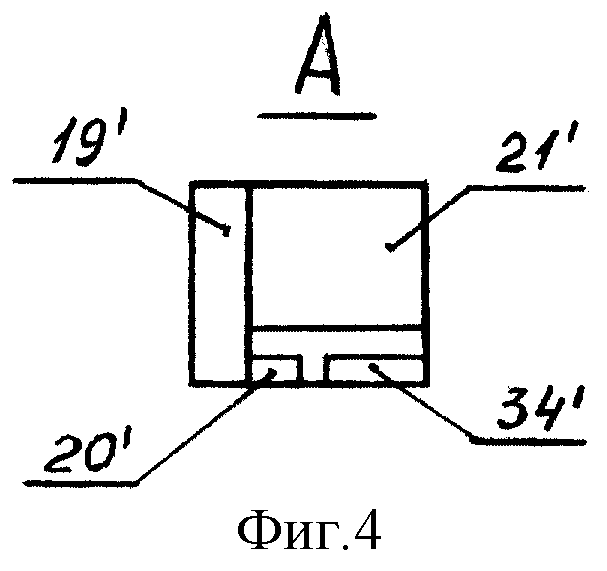
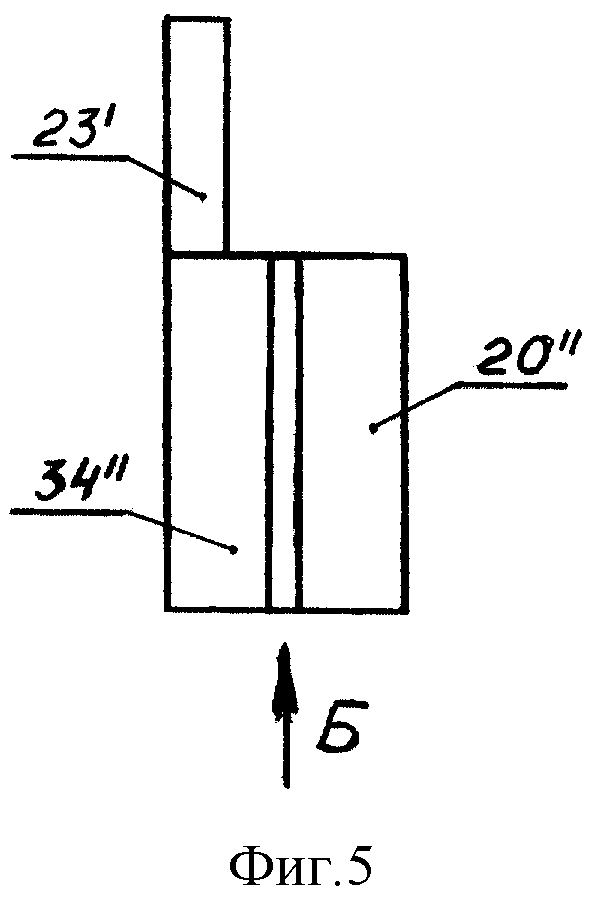
В блоках электродов 19I, 23I (фиг. 3-6) выполнены соответственно первые неподвижные электроды 20I, 20II, вторые неподвижные электроды 21I, 21II, третьи неподвижные электроды 22I, 22II и четвертые неподвижные электроды 34I, 34II в виде, например, металлизированных участков. Аналогичные неподвижные электроды 20III, 20IV, 21III, 21IV, 22III, 22IV, 34III, 34IV образованы в блоках электродов 19II, 23II.
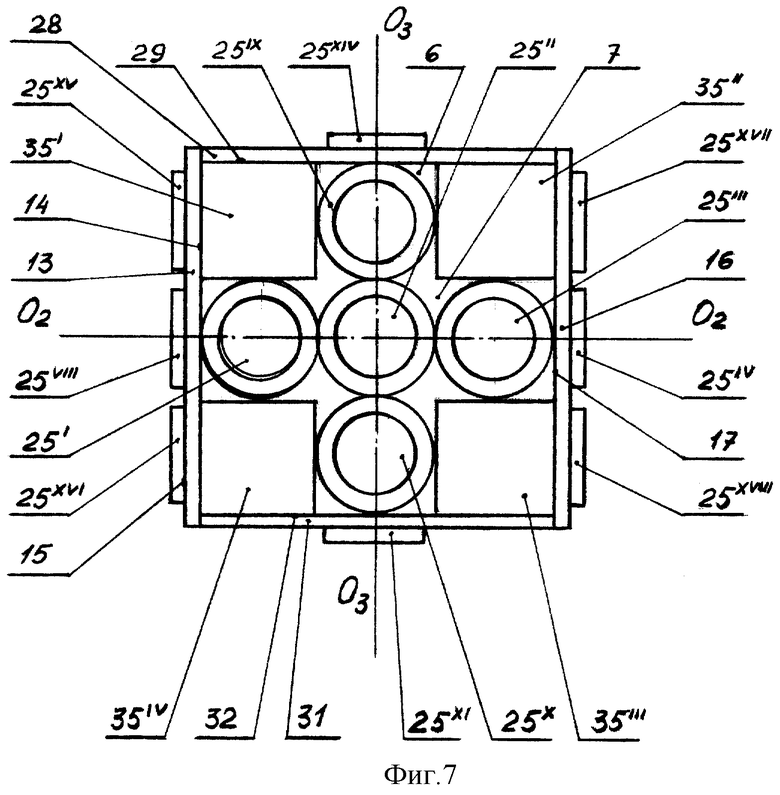
Чувствительный элемент 6 (фиг. 7) может быть выполнен в виде параллелепипеда или куба. В углах его первой торцевой грани 7 образованы окна 35I - 35IV. На внешней поверхности 15 первой боковой грани 13 расположены компенсационные катушки 25XV, 25XVI, а на внешней поверхности 18 второй боковой грани 16 - компенсационные катушки 25XVII, 25XVIII. Компенсационные катушки 25XV - 25XVIII вместе с соответствующими постоянными магнитами, расположенными на основании 1, образуют магнитоэлектрический силовой преобразователь цепи обратной связи преобразователя углового ускорения относительно оси O1 - О1.
Через окно 35I во внутренний объем чувствительного элемента 6 устанавливается блок электродов 19I так, чтобы первый неподвижный электрод 20I и четвертый неподвижный электрод 34I располагались напротив внутренней поверхности 14 первой боковой грани 13, второй неподвижный электрод 21I располагался напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22I располагался напротив внутренней поверхности 17 второй боковой грани 16 между окнами 35I и 35IV. Через окно 35III во внутренний объем чувствительного элемента 6 устанавливается блок электродов 23I так, чтобы первый неподвижный электрод 20II и четвертый неподвижный электрод 34II располагались напротив внутренней поверхности 17 второй боковой грани 16, второй неподвижный электрод 21II находился напротив внутренней поверхности 8 первой торцевой грани 7, третий неподвижный электрод 22II располагался напротив внутренней поверхности 11 второй торцевой грани 10 между окнами 35II, 35III. Через окно 35II во внутренний объем чувствительного элемента 6 устанавливается блок электродов 19II так, чтобы первый неподвижный электрод 20III и четвертый неподвижный электрод 34III располагались напротив внутренней поверхности 29 третьей боковой грани 28, второй неподвижный электрод 21III находился напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22III располагался напротив внутренней поверхности 11 второй торцевой грани 10 между окнами 35I, 35II.
Через окно 35IV во внутренний объем чувствительного элемента 6 устанавливается блок электродов 23II так, чтобы первый неподвижный электрод 20IV и четвертый неподвижный электрод 34IV располагались напротив внутренней поверхности 32 четвертой боковой грани 31, второй неподвижный электрод 21IV находился напротив внутренней поверхности 8 первой торцевой грани 7, а третий неподвижный электрод 22IV располагался напротив внутренней поверхности 11 второй торцевой грани 10 между окнами 35III, 35IV.
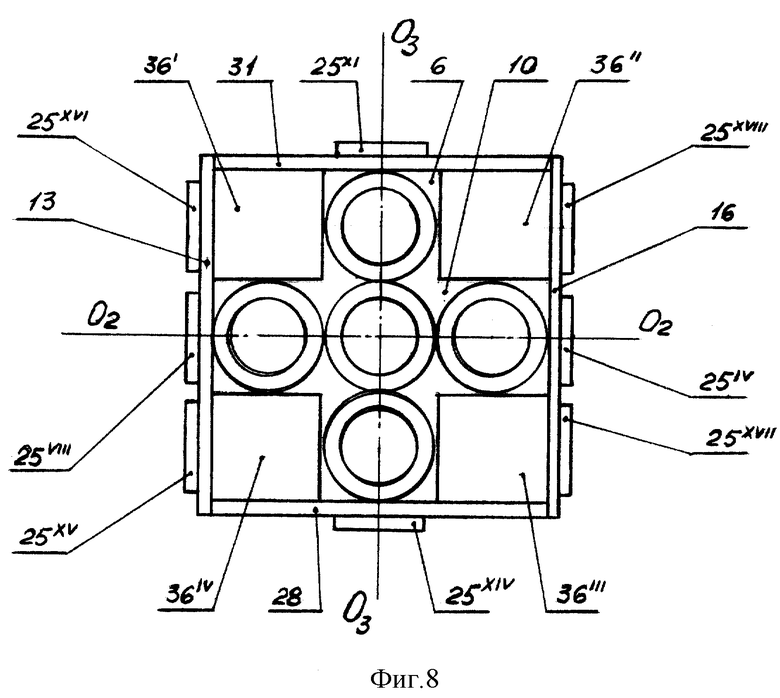
Для симметрии чувствительного элемента 6 (фиг. 8) в углах его второй торцевой грани 10 выполнены окна 36I- 36IV. Окна для установки блоков электродов могут быть выполнены в других любых гранях чувствительного элемента 6.
Преобразователь линейного ускорения (фиг. 9) по оси O2 - О2 содержит выполненный по мостовой схеме датчик линейного положения с резисторами R1I и R2I и конденсаторами CI1 и CI2, из которых конденсатор CI1 образован первым неподвижным электродом 20I емкостного преобразователя и подвижным электродом в виде электропроводной поверхности чувствительного элемента 6, а конденсатор C2 образован первым неподвижным электродом 20II и электропроводной поверхностью чувствительного элемента 6. Выход датчика линейного положения соединен с входом фазочувствительного усилителя 37I, к входу которого подключены последовательно включенные компенсационные катушки 25IV, 25VIII.
Фазочувствительный усилитель 37I может быть выполнен в составе дифференциального усилителя, усилители переменного тока, фазового демодулятора и усилителя постоянного тока.
Датчик линейного положения запитывается от источника переменного напряжения U~. Выходным сигналом преобразователя линейного ускорения является напряжение Uа на резисторе RIн.
Аналогично выполнен преобразователь линейного ускорения по оси O3 - O3, у которого в схему включены первые неподвижные электроды 20III, 20IV и компенсационные катушки 25XI, 25XIV.
В преобразователе линейного ускорения (фиг. 10) по оси О1 - О1 конденсатор СII1 образован соединенными вместе третьими неподвижными электродами 22I, 22II и электропроводной поверхностью чувствительного элемента 6, а конденсатор CII2 образован соединенными вместе вторыми неподвижными электродами 21III, 21IV и электропроводной поверхностью чувствительного элемента 6. К выходу фазочувствительного усилителя 37II подключены компенсационные катушки 25II, 25VI.
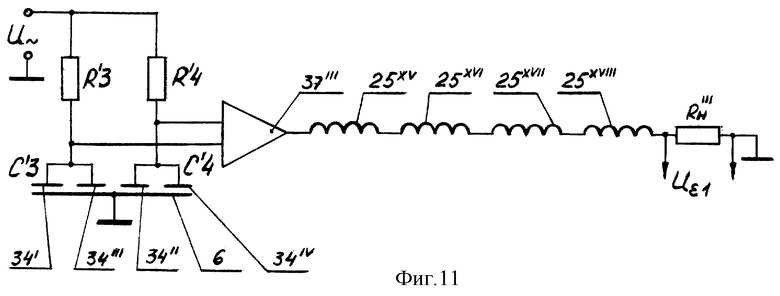
В преобразователе углового ускорения (фиг. 11) относительно оси О1 - O1 в датчике углового положения конденсатор CI3 образован соединенными вместе четвертыми неподвижными электродами 34I, 34III и электропроводной поверхностью чувствительного элемента 6, конденсатор CI4 образован соединенными вместе четвертыми неподвижными электродами 34II, 34IV и электропроводной поверхностью чувствительного элемента 6. К выходу фазочувствительного усилителя 37III подключены компенсационные катушки 25XV - 25XVIII. Выходным сигналом преобразователя углового ускорения является напряжение Uε на резисторе RнIII.
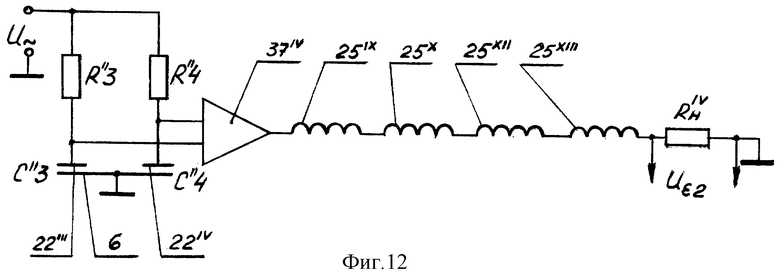
В преобразователе углового ускорения (фиг. 12) относительно оси O2 - O2 в датчике углового положения конденсатор CII3 образован третьим неподвижным электродом 22III, конденсатор CII4 образован третьим неподвижным электродом 22IV и электропроводной поверхностью чувствительного элемента 6. К выходу фазочувствительного усилителя 37IV подключены компенсационные катушки 25IX, 25X, 25XII, 25XIII.
Аналогично выполнен преобразователь углового ускорения относительно оси O3 - O3, у которого в схему включены вторые неподвижные электроды 21I, 21II и компенсационные катушки 25I, 25III, 25V, 25VII.
Преобразователь инерциальной информации работает следующим образом. При наличии линейного ускорения, например, по оси O2 - О2 (фиг. 9), происходит поступательное перемещение чувствительного элемента 6 вдоль оси O2 - O2, при этом изменяются емкости конденсаторов CI1, CI2, и с выхода датчика линейного положения на вход фазочувствительного усилителя 37I поступает сигнал рассогласования следящей системы преобразователя линейного ускорения. После преобразования и усиления сигнал с выхода фазочувствительного усилителя подается в компенсационные катушки 25IV, 25VIII магнитоэлектрического силового преобразователя. За счет проходящего через компенсационные катушки 25IV, 25VIII тока восстанавливается баланс следящей системы, в результате чего падение напряжения Uа1 на резисторе RнI пропорционально линейному ускорению.
Аналогичным образом производится измерение линейных ускорений по осям O1 - О1 и O3 - O3.
При наличии углового ускорения, например, относительно оси O2 - O2 (фиг. 12), происходит угловое перемещение чувствительного элемента 6 относительно оси O2 - O2, емкости конденсаторов CII3, CII4 изменяются, и с выхода датчика углового положения на вход фазочувствительного усилителя 37IV подается сигнал рассогласования следящей системы преобразователя углового ускорения. После его преобразования и усиления сигнал с выхода фазочувствительного усилителя 37IV подается в компенсационные катушки 25IX, 25X, 25XII, 25XIII магнитоэлектрического силового преобразователя. За счет проходящего через них тока восстанавливается баланс следящей системы преобразователя углового ускорения относительно оси O2 - O2 и на резисторе RIVн получается падение напряжения Uε2, пропорциональное угловому ускорению.
Аналогичным образом производится измерение угловых ускорений относительно осей O1 - O1 и O3 - O3.
Таким образом, посредством преобразователя инерциальной информации производится измерение линейных ускорений по трем ортогональным осям и угловых ускорений относительно этих осей.
Источники информации
1. Патент Франции N 2511509, кл. G 01 P 15/125. Трехосный акселерометр с электростатическим подвесом крестовидной контрольной массы.
2. Патент США N 4711125, кл. G 01 C 21/12, НКИ 73/510, 73/517. Инерциальное измерительное устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |



Изобретение относится к области измерительной техники, а именно к компенсационным преобразователям линейных и угловых ускорений. Техническим результатом изобретения является уменьшение габаритов преобразователя инерциальной информации. Преобразователь содержит основание, чувствительный элемент со степенями линейного и углового перемещений относительно трех ортогональных осей, датчики линейного и углового положений относительно каждой оси с неподвижными электродами емкостных преобразователей в основании, магнитоэлектрические силовые преобразователи, фазочувствительный усилитель для каждого датчика углового и линейного положений. В каждом углу по крайней мере двух граней чувствительного элемента выполнено окно, через окна в гранях введены неподвижные электроды емкостных преобразователей, ориентированные относительно внутренних поверхностей чувствительного элемента. 12 ил.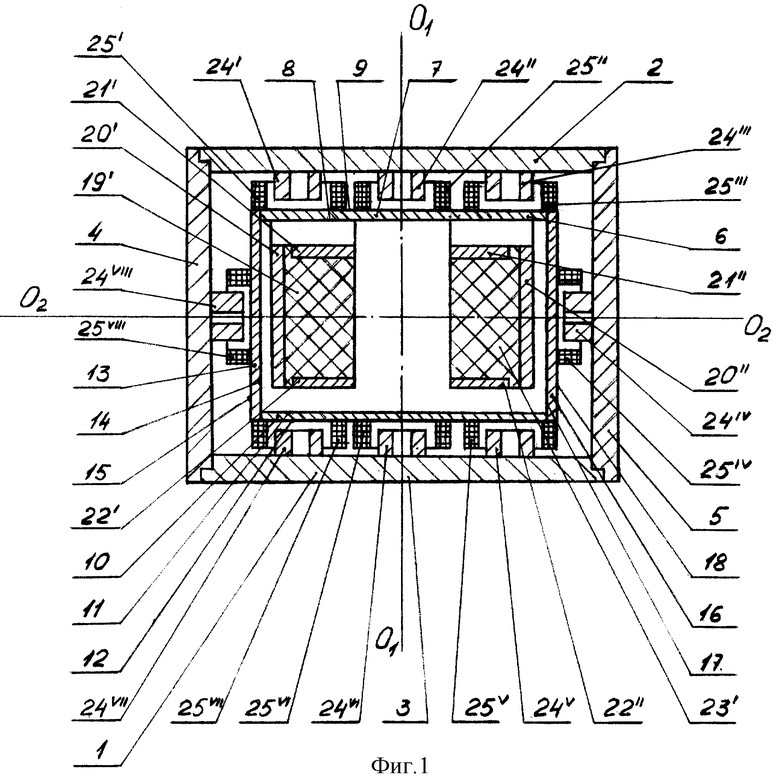
Преобразователь инерциальной информации, содержащий основание, чувствительный элемент в форме параллелепипеда или куба со степенями линейного и углового перемещений относительно трех ортогональных осей датчики линейного и углового положений относительно каждой оси с неподвижными электродами емкостных преобразователей в основании и подвижным электродом в виде электропроводной поверхности чувствительного элемента, магнитоэлектрические силовые преобразователи в цепи обратной связи преобразователей линейного и углового ускорений по каждой оси, фазочувствительный усилитель для каждого датчика линейного и углового положений по каждой оси, отличающийся тем, что по крайней мере в одной паре параллельных друг другу граней чувствительного элемента в каждом углу грани выполнено окно, через окно в гранях введены неподвижные электроды емкостных преобразователей, ориентированные относительно внутренних поверхностей чувствительного элемента.
| US 4711125, 08.12.1987 | |||
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781616A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781618A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ | 1989 |
|
RU2017159C1 |
