Изобретение относится к способу для корректировки положения рельсового пути, причем на время подбивки шпал рельсовый путь приподнимают и задают ему временное положение, а затем в рамках стабилизации положения рельсового пути при статической нагрузке в сочетании с поперечными колебаниями и под контролем стабилизатора опускают для окончательной установки в заданном положении.
В журнале "Railway Track & Structures", 3/96, с. 29-33 описан подобный способ корректировки положения рельсового пути. Используемый при этом так называемый "механический испытательный поезд" состоит в данном случае из высокопроизводительной шпалоподбивочной машины, планировщика балластной призмы и следующего за ними в рабочем направлении стабилизатора положения рельсового пути. Этот рабочий узел, составленный из трех единиц подвижного состава, во время работы непрерывно передвигается, причем с помощью шпалоподбивочной машины рельсы переводят в точно заданное временное положение, а затем, как и положено, выполняют балластировку щебнем. И, наконец, при статической нагрузке в сочетании с горизонтальными поперечными колебаниями и под контролем стабилизатора рельсового пути опускают для окончательной установки в заданном положении.
Задачей предложенного изобретения является создание способа для корректировки положения рельсового пути указанного типа, с помощью которого можно добиться его улучшенного положения.
Эта задача решается с помощью заявленного способа указанного типа, заключающегося в том, что устанавливают рельсовый путь во время подбивки шпал во временное положение, после чего в рамках стабилизации производят установку для устранения начальной осадки, при этом измеряют полученное после подбивки шпал временное положение и полученные данные вводят в вычислительное устройство, после чего рассчитывают окончательное положение, исключающее ошибку, связанную с волнистым профилем пути, и определяют значение поправок в виде разницы между временным положением и окончательным положением, причем в рамках стабилизации положения рельсового пути и в соответствии со значениями поправок изменяют статическую нагрузку и/или поперечные усилия, воздействующие на рельсовый путь, для его установки в окончательное положение.
Заявленный способ основан на тех соображениях, что следует использовать стабилизацию рельсового пути, выполняемую вслед за подбивкой, для предупреждения возможной осадки и одновременно для окончательной корректировки возможных ошибок, в частности ошибок, связанных с волнистым профилем пути. Для этого заданное положение рельсового пути, которое он занял сразу после подбивки шпал, целесообразно измерить с помощью собственной базовой системы шпалоподбивочной машины, чтобы с помощью компенсационного метода электронного измерения стрелы прогиба рассчитать значения поправок, связанные с волнистым профилем пути, для определения уровня рельсового пути и его бокового сдвига. Изменение уровня и боковой сдвиг рельсового пути, соответствующие поправочным значениям, выгодно, наконец, выполнять вместе со стабилизацией его положения, соответствующим образом изменяя необходимые для этого компоненты, например нагрузку и/или поперечные усилия. Так выгодным образом в сочетании со стабилизацией положения рельсового пути, которая является завершающим этапом корректировки положения рельсового пути, можно добиться также исключения ошибок, связанных с волнистым профилем пути, не прибегая к дополнительным затратам труда.
Изобретение раскрывается ниже более подробно с помощью примера выполнения, представленного на чертеже.
Фиг.1 - подбивочная машина для подбивки шпал рельсового пути, вид сбоку.
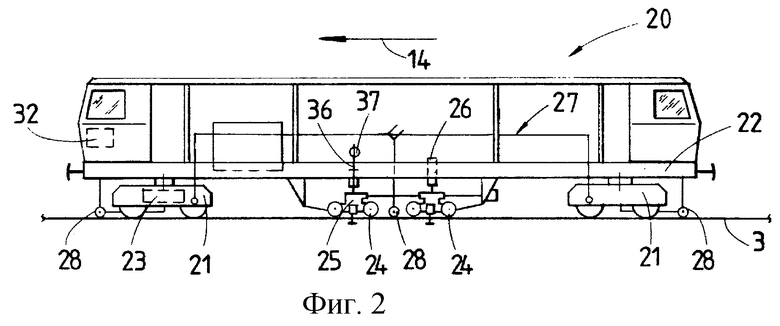
Фиг.2 - стабилизатор положения рельсового пути, вид сбоку.
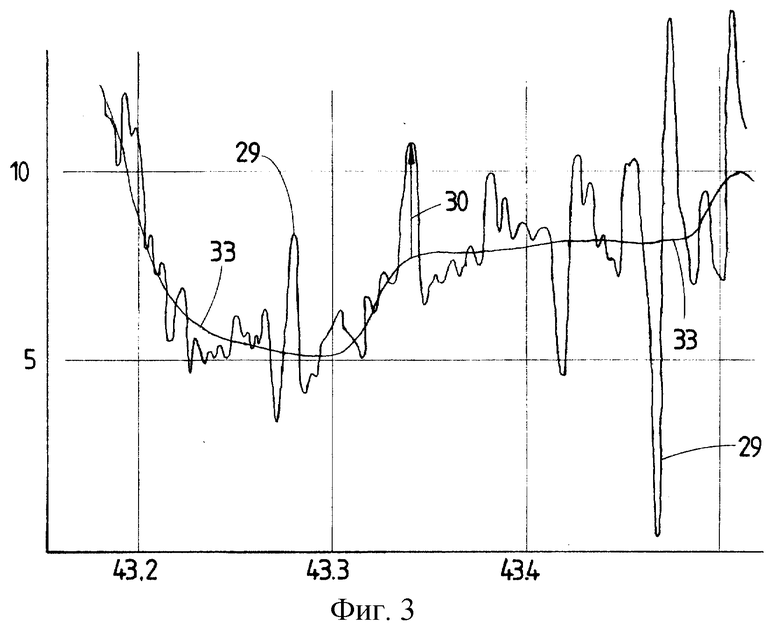
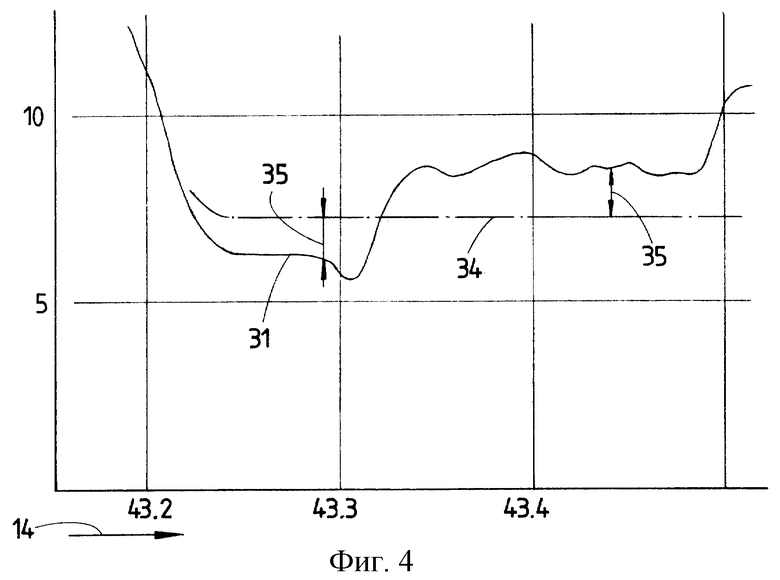
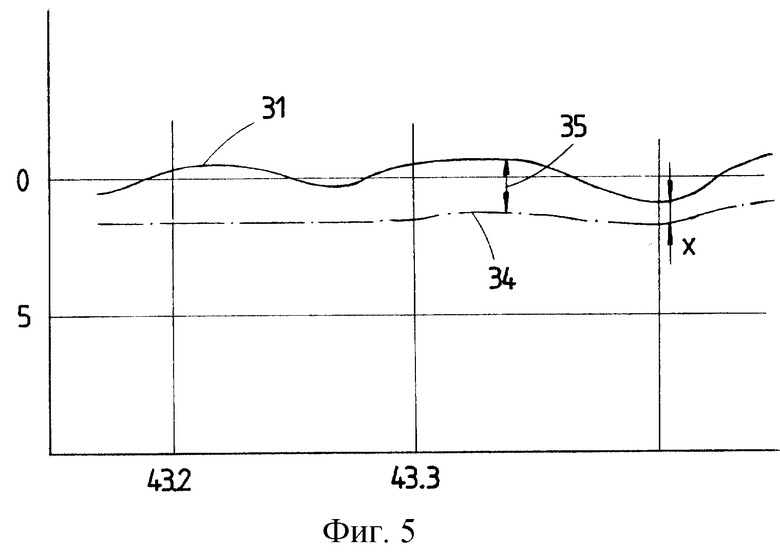
Фиг. 3-5 - диаграмма, представляющая различные фактические и заданные значения положения рельсового пути.
На фиг.1 представлена шпалоподбивочная машина 1, которая имеет раму 4 с механизмом для перемещения 5, причем рама машины 4 перемещается по рельсовому пути 3 с помощью ходовых механизмов 2. Между обоими ходовыми механизмами 2 находится вспомогательная рама 7, которая выполнена с возможностью перемещения в продольном направлении относительно машинной рамы 4 с помощью приводного механизма 6 и соединена с подбивочным агрегатом 8, регулируемым по высоте, а также с путеподъемным агрегатом 9. С машинной рамой 4 связана собственно машинная базовая система 10 для регистрации стрелы прогиба или ошибок в уровне пути 3 и его поперечном смещении. Эта базовая система имеет измерительные оси 11, которые разнесены между собой в продольном направлении машины и могут катиться по рельсовому пути 3 и служат для копирования положения пути, а также направляющую и нивелирную хорды (12, 13).
За шпалоподбивочной машиной 1 - рассматривая в рабочем направлении (стрелка 14) - следуют измерительная прицепная тележка 15 со своей собственной базовой системой 16 и измерительные оси 17. Измерительная прицепная тележка 15, передний конец которой соединен с машинной рамой 4 шарниром 18, опирается своим задним концом на рельсовый путь 3 при помощи ходового механизма 19.
Стабилизатор рельсового пути 20, представленный на фиг.2, имеет машинную раму 22, опирающуюся на рельсовый путь 3 при помощи ходовых механизмов 21, а также механизм для перемещения 23. Между обоими ходовыми механизмами 21 находятся два стабилизирующих агрегата 24, которые с помощью эксцентрикового привода 25 могут подавать на рельсовый путь усилия поперечных колебаний, проходящие горизонтально и поперек относительно продольного направления рельсов. Одновременно с этим с помощью приводных механизмов 26 на рельсовый путь переносится статическая нагрузка через стабилизирующие агрегаты 24. Для регистрации геометрии рельсового пути предусмотрена базовая система 27 с измерительными осями 28. Стабилизатор пути 20 вводится в действие целесообразно сразу после шпалоподбивочной машины 1 в том же рабочем направлении (стрелка 14). Для корректировки бокового смещения, кроме усилий поперечных колебаний на рельсовый путь 3, можно оказывать на выбор и другие поперечные усилия с помощью системы рычагов 36 с приводным механизмом 37 (более подробно описано в ЕР 0 666 371 A1).
Представленная на фиг. 3 диаграмма показывает на оси Y стрелы прогиба (отрезки, перпендикулярные хорде кривой пути) рельсового пути 3 в миллиметрах, а на оси Х - путь или разметку пути по километрам. Кривая фактического положения 29, показывающая ошибку бокового смещения рельсового пути 3, регистрируется базовой системой 10 подбивочной машины 1 непосредственно перед подбивкой шпал рельсового пути и составляется из множества стрел прогиба 30. Измеренные стрелы прогиба 30 выравнивают с помощью компьютерной программы, названной компенсационным методом измерения стрелы прогиба, с возможным учетом максимально допустимых значений смещения (см. сглаженная кривая 33), причем смещения рельсового пути 3, необходимые для компенсации или сглаживания кривой, рассчитывают также с помощью известного факторного анализа.
Кривая, представляющая собой на фиг.4 сплошную линию, показывает действительное положение рельсового пути 3, в котором он находится сразу после подбивки шпал и которое обозначено здесь как временное заданное положение 31. Это временное заданное положение 31 измеряют сразу после подбивки шпал с помощью измерительной прицепной тележки 15, при этом четко видны ошибки, связанные с волнистым профилем пути. Измерение можно произвести также, например, с помощью путеизмерительного вагона. Полученные таким образом данные можно передать на стабилизатор 20, следующий в рабочем направлении целесообразно сразу за подбивочной машиной 1, например, по радио или с помощью дискеты или модема. Поступившие данные вводятся в вычислительное устройство 32 стабилизатора 20, после чего с помощью известного компенсационного метода электронного измерения стрелы прогиба и факторного анализа рассчитывают значения поправок уровня и бокового сдвига рельсового пути 3 с учетом его волнистого профиля. С помощью полученных значений поправок 35 стабилизатор 20 может выполнять последующую стабилизацию положения рельсового пути на основе прецизионного метода (положение рельсового пути регистрируют в трех точках и корректируют в соответствии с заданными значениями поправок или заданными стрелами прогибов), это значит, что одновременно с опусканием рельсов для предупреждения начальной осадки происходит также окончательная корректировка положения рельсового пути. Значения поправок 35, относящиеся к боковому сдвигу рельсового пути 3, можно получить с помощью соответствующего изменения усилий горизонтальных поперечных колебаний стабилизирующих агрегатов 24 и/или с помощью соответствующей нагрузки на приводные механизмы 37, воздействующие на систему рычагов 36. Значения поправок 35 (см. фиг. 5), связанные с корректировкой уровня рельсового пути, получают путем изменения статической нагрузки с помощью приводных механизмов 26, причем, однако, следует учесть, что корректировка уровня достигается исключительно при опускании рельсового пути 3.
Штрихпунктирная кривая, изображенная на фиг.4, показывает окончательное заданное положение 34, которое определяется в результате расчетов, произведенных с помощью компенсационного метода электронного измерения стрелы прогиба и факторного анализа на основе временно заданного положения 31, в котором находятся рельсы во время подбивки шпал. Из разницы между обоими заданными положениями 31 и 34 и получаются значения поправок 35. Во время рабочей поездки стабилизатора 20 в направлении стрелки 14 в области разметок по километрам 43.22-43.32 потребовалось увеличение поперечных усилий влево в соответствии с полученными значениями поправок 35, чтобы рельсовый путь 3 смог занять соответствующее заданное положение 34. Затем для исправления ошибки бокового сдвига рельсового пути 3 необходимо повысить поперечные усилия вправо.
Диаграмма, представленная на фиг.5, показывает уровень рельсового пути. При расчете окончательного заданного положения 34 (штрихпунктирная линия) необходимо учесть, что во всех областях рельсового пути следует произвести минимальное опускание (х). Благодаря повышению статической нагрузки в отдельных областях временно заданного уровня 31 имеется возможность по меньшей мере сгладить или полностью исключить ошибки уровня из-за волнистого профиля пути, чтобы затем рельсовый путь 3 опустить в заданное положение 34.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДБИВКИ И СТАБИЛИЗАЦИИ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2143512C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА, КОМПОНОВКА МАШИН И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2124088C1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ | 1996 |
|
RU2110635C1 |
| СПОСОБ УПЛОТНЕНИЯ ЩЕБНЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2048630C1 |
| ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ | 1998 |
|
RU2158796C2 |
| СПОСОБ ПОДБИВКИ БОЛЬШОГО КОЛИЧЕСТВА ШПАЛ РЕЛЬСОВОГО ПУТИ | 1996 |
|
RU2114948C1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА И СПОСОБ ПОДБИВКИ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2082847C1 |
| СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 2000 |
|
RU2169810C1 |
| СПОСОБ ДЛЯ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1999 |
|
RU2167970C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2001 |
|
RU2228985C2 |
Изобретение относится к области путевого хозяйства. Сущность изобретения: способ заключается в том, что устанавливают рельсовый путь на время подбивки шпал во временное положение, измеряют полученное после подбивки шпал временное положение, и полученные данные вводят в вычислительное устройство, после чего рассчитывают окончательное положение, исключающее ошибку, связанную с волнистым профилем пути, и определяют значение поправок в виде разницы между временным положением и окончательным положением, и в рамках стабилизации положения рельсового пути и в соответствии со значениями поправок изменяют статическую нагрузку и/или поперечные усилия, воздействующие на рельсовый путь для его установки в окончательное положение. Изобретение позволяет повысить качество подбивки пути. 5 ил.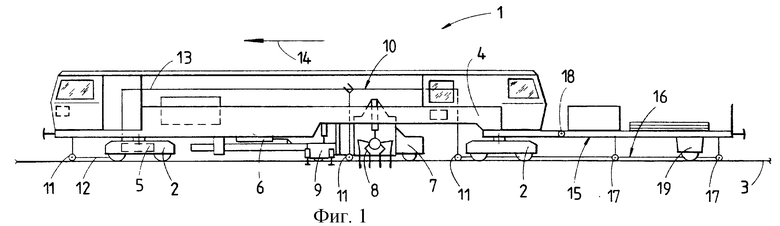
Способ для корректировки положения рельсового пути, заключающийся в том, что устанавливают рельсовый путь (3) на время подбивки шпал во временное положение (31), после чего в рамках стабилизации производят установку для устранения начальной осадки, отличающийся тем, что измеряют полученное после подбивки шпал временное положение (31) и полученные данные вводят в вычислительное устройство, после чего рассчитывают окончательное положение (34), исключающее ошибку, связанную с волнистым профилем пути, и определяют значение поправок (35) в виде разницы между временным положением (31) и окончательным положением (34), и в рамках стабилизации положения рельсового пути и в соответствии со значениями поправок (35) изменяют статическую нагрузку и/или поперечные усилия, воздействующие на рельсовый путь для его установки в окончательное положение (34).
| "RAILWAY TRACK & STRUCTURES", № 3, 1996, с.29-33 | |||
| Непрерывно перемещающаяся машина для распределения и уплотнения щебеночной балластной призмы железнодорожного пути | 1989 |
|
SU1768033A3 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |
| GB 1545574, 10.05.1979 | |||
| Устройство для стабилизации железнодорожного пути | 1990 |
|
SU1761845A1 |

