Изобретение относится к судостроению, в частности к подводной технике, и более конкретно, к устройствам для выпуска и посадки управляемых по кабелю подводных аппаратов. Оно может быть использовано при подкильном расположении на подводных и надводных судах, когда выпуск и посадка подводного аппарата производится без помощи личного состава.
Известно устройство для выпуска и посадки управляемого по кабелю подводного аппарата Рекон-III, описанное в книге Милна П. "Подводные инженерные исследования", Судостроение, Л. , 1984, с. 249. Это устройство может быть принято в качестве ближайшего аналога предлагаемого изобретения.
Известное устройство содержит закрепляемый на обеспечивающем судне фундамент, размещенные на нем лебедку с соединительным кабелем, роликовую трассу для его проводки и основную поворотную раму, на которой установлен концевой ролик трассы.
Известное устройство для выпуска и посадки управляемого по кабелю подводного аппарата не может быть и использовано при подкильном расположении на подводных или надводных судах, когда выпуск и посадка подводного аппарата производится без помощи личного состава.
Технический результат от использования изобретения заключается в обеспечении выпуска и посадки управляемого по кабелю подводного аппарата при его подкильном расположении на подводных и надводных судах, когда выпуск и посадка подводного аппарата производится без помощи личного состава.
Это достигается тем, что устройство для выпуска и посадки управляемого по кабелю подводного аппарата, содержащее закрепляемый на обеспечивающем судне фундамент, размещенные на нем лебедку с соединительным кабелем, роликовую трассу для его проводки и основную поворотную раму, на которой установлен концевой ролик трассы, снабжено дополнительной поворотной рамой, присоединенной к основной поворотной раме в месте установки концевого ролика с возможностью поворота вокруг вертикальной и горизонтальной осей, и узлом фиксации подводного аппарата на фундаменте после посадки.
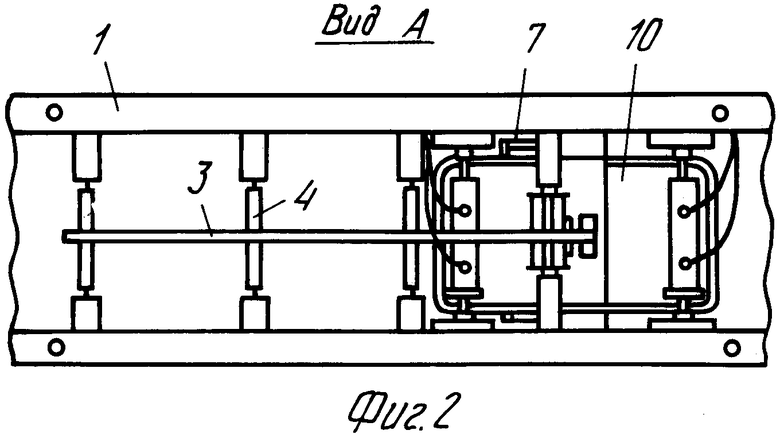
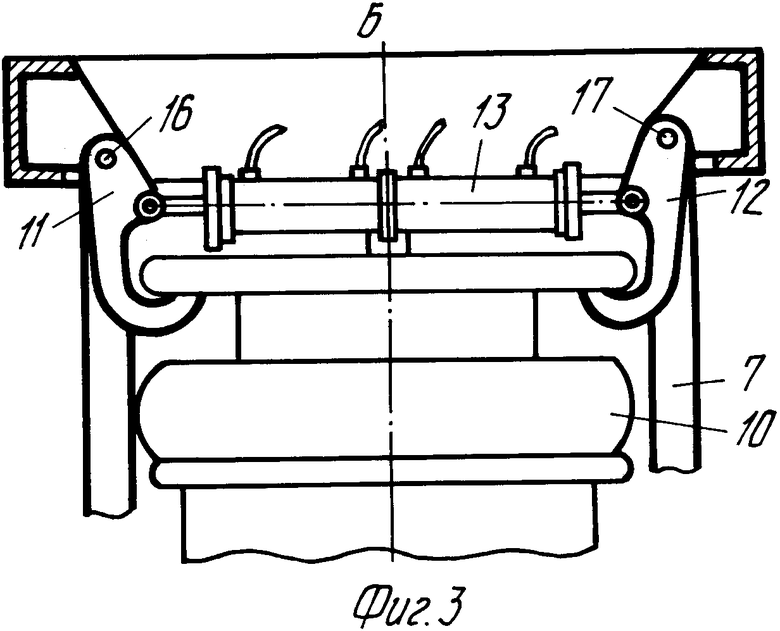
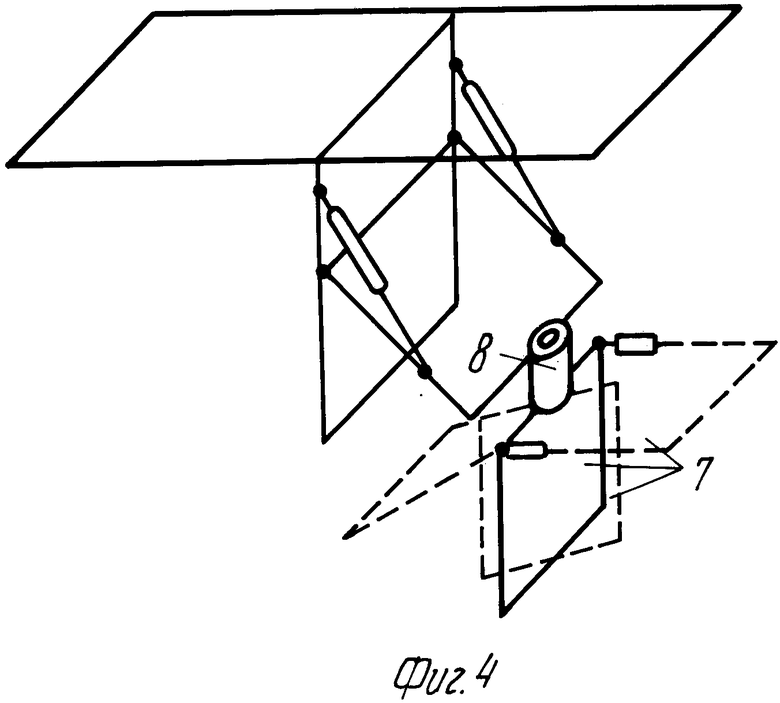
На фиг.1 показан общий вид предлагаемого устройства, вид сбоку; на фиг. 2 - вид сверху; на фиг. 3 - фиксация подводного аппарата на фундаменте; на фиг. 4 - схема вращения дополнительной поворотной рамы.
Устройство для выпуска и посадки управляемого по кабелю подводного аппарата содержит закрепляемый на обеспечивающем судне фундамент 1, размещенные на нем лебедку 2 с соединительным кабелем 3, роликовую трассу 4 для проводки кабеля 3 и основную поворотную раму 5, на конце которой установлен концевой ролик 6 трассы. Устройство снабжено дополнительной поворотной рамой 7, присоединенной к основной поворотной раме 5 в месте установки концевого ролика 6 с возможностью поворота вокруг вертикальной оси 8 и горизонтальной оси 9, а также узлом фиксации подводного аппарата 10 на фундаменте 1 после его посадки. Узел фиксации состоит из двух левых захватов 11 и двух правых захватов 12. Каждая пара захватов 11 и 12 соединена с гидроприводом 13. Поворот основной поворотной рамы 5 вокруг горизонтальной оси 14 осуществляется при помощи гидропривода 15.
Работа устройства происходит следующим образом.
В исходном положении (до выпуска) подводный аппарат 10 зафиксирован на фундаменте 1 - захваты 11 и 12 сведены и удерживают подводный аппарат; соединительный кабель 3 намотан на барабан лебедки 2, основная поворотная рама 5 находится в верхнем положении, а дополнительная поворотная рама 7 заведена под подводный аппарат 10 и находится в вертикальном положении (фиг.3). Выпуск подводного аппарата 10 происходит в следующей последовательности. При помощи гидропривода 13, соединенного с гидронасосом (на чертеже не показан), захваты 11 и 12 разворачиваются вокруг осей 16 и 17 и освобождают подводный аппарат 10 от крепления к фундаменту 1; лебедка 2 начинает сматывать соединительный кабель 3, а основная поворотная рама 5 под действием гидропривода 15 начинает поворачиваться вокруг оси 14, опуская подводный аппарат 10 с дополнительной рамой 7 вниз до выхода за пределы устройства. После этого дополнительная поворотная рама 7 при помощи специального привода поворачивается вокруг горизонтальной оси 9 и выходит из-под подводного аппарата 10 (фиг.1). После этого, сматывая соединительный кабель 3 с лебедки 2 и одновременно включая движители подводного аппарата 10, последний переводится в рабочий режим, отходит от судна и выполняет свои задачи. Основная поворотная рама 5 переводится в верхнее положение. Если подводный аппарат 10 является буксируемым, то после сматывания соединительного кабеля 3 на необходимую длину судно начинает буксировку аппарата.
Посадка аппарата на судно происходит в следующей последовательности.
По завершению работы подводного аппарата 10 основная поворотная рама 5 вращением вокруг оси 14 при помощи гидропривода 15 переводится в нижнее положение и начинается выборка соединительного кабеля 3, который наматывается на барабан лебедки 2. При подходе подводного аппарата 10 к концевому ролику 6 визуально при помощи телекамеры 18, установленной на фундаменте 1, оператор определяет угол между продольными осями фундамента 1 и подводного аппарата 10. Возможны два варианта - указанный угол практически равен нулю (когда подводный аппарат выбирает в исправном состоянии, его курс стабилизирован при помощи аппаратуры управления, или буксируемый подводный аппарат за счет стабилизаторов удерживает курс, совпадающий с вектором скорости буксировки), и угол между продольными осями фундамента 1 и подводного аппарата 10 существенно не равен нулю.
При выборке подводного аппарата по первому варианту - подводный аппарат подтягивается к концевому ролику 6, после чего дополнительная поворотная рама 7, вращаясь вокруг горизонтальной оси 9, переводится в вертикальное положение, в результате чего ее нижняя перекладина заходит под подводный аппарат 10. Поворотом основной поворотной рамы 5 вокруг оси 14 подводный аппарат поднимается к фундаменту и входит в зону действия узла фиксации. По команде оператора гидропривод 13 приводит во вращение захваты 11 и 12, которые, поворачиваясь вокруг осей 16 и 17, фиксируют подводный аппарат 10 на фундаменте 1.
При выборке подводного аппарата по второму варианту (это может быть при выходе из строя аппаратуры управления подводным аппаратом) по команде оператора дополнительная поворотная рама 7 поворачивается вокруг вертикальной оси 8 до такого положения, когда продольная ось подводного аппарата 10 станет параллельной продольной оси дополнительной поворотной рамы 7. После этого дополнительная поворотная рама 7 поворачивается вокруг горизонтальной оси 9 и ее нижняя перекладина заводится под подводный аппарат 10. Затем дополнительная поворотная рама 7 вместе с подводным аппаратом 10, находящимся внутри нее, поворачивается вокруг вертикальной оси 8 до достижения параллельности продольных осей фундамента 1 и подводного аппарата 10. Дальнейший процесс посадки подводного аппарата 10 происходит аналогично описанному выше при реализации первого варианта.
Сущность изоюретения: устройство для выпуска и посадки управляемого по кабелю подводного аппарата содержит закрепляемый на обеспечивающем судне фундамент, размещенные на нем лебедку с соединительным кабелем, роликовую трассу для проводки кабеля и основную поворотную раму, на конце которой установлен концевой ролик трассы. Устройство снабжено дополнительной поворотной рамой, присоединенной к основной поворотной раме в месте установки концевого ролика с возможностью поворота вокруг вертикальной оси и горизонтальной оси 9, а также узлом фиксации подводного аппарата на фундаменте 1 после его посадки. 4 ил.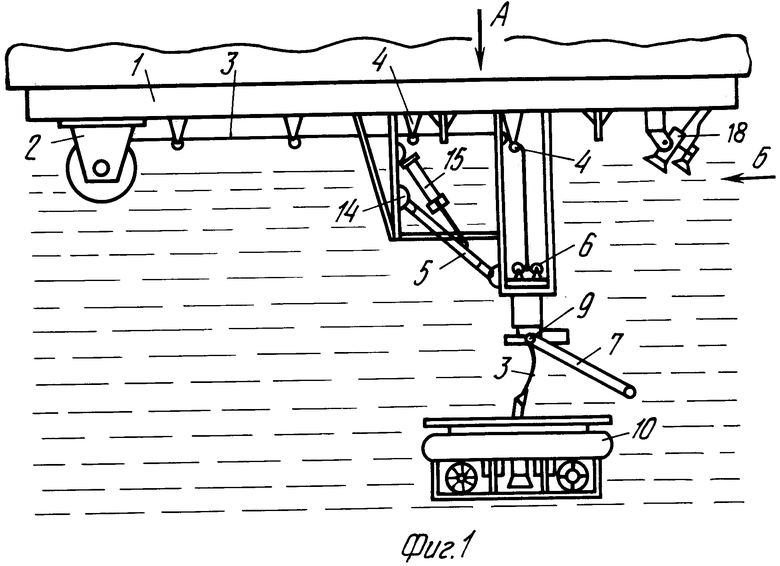
Устройство для выпуска и посадки управляемого по кабелю подводного аппарата, содержащее закрепляемый на обеспечивающем судне фундамент, размещенные на нем лебедку с соединительным кабелем, роликовую трассу для его проводки и основную поворотную раму, на которой установлен концевой ролик трассы, отличающееся тем, что оно снабжено дополнительной поворотной рамой, присоединенной к основной поворотной раме в месте установки концевого ролика с возможностью поворота вокруг вертикального и горизонтального осей, и узлом фиксации подводного аппарата на фундаменте после его посадки.
| Милн П | |||
| Подводные инженерные исследования | |||
| - Л., "Судостроение", 184, с | |||
| Трансляция, предназначенная для телефонирования быстропеременными токами | 1921 |
|
SU249A1 |
