Изобретение относится к системам автоматического управления самолетом. По основному авт, св. № 909о97 известно устройство для управления траекторией самолета при уходе на второй круг, содержащее последовательно соединенные датчики допустимой перегрузки, коммутатор, первый интегратор, первый сумматор, ограничитель, второй интегратор, второй сумматор и директорный пилотажный прибор, а также первьй блок умножения, связанный первым и вторым входами соответственно с задатчиком угла наклона глиссады и первым запоминающим устройством, второй блок умножения, связанный первым и вторым входами с датчиком воздушной скорости и задатчиком угла подъема траектории соответственно, причем датчик воздушной скорости подключен к входу первого запоминающего устройства, последовательно соединенные датчик высоты, второе запоминающее устройство, подключенное своим выходом к второму входу второ го сумматора, при этом третьи входы второго сумматора и переключающего устройства подключены к датчику высоты, а четвертый и пятьй входы вто рого сумматора подключены к датчика угла тангажа и угловой скорости тан гажа соответственно, блок синхронизации, подключенный к вторым входам первого и второго интеграторов, пер вого и второго запоминающих устройс ипереключающего устройства, а такж датчик критического угла атаки, под ключенный к второму входу коммутато ра D1. Недостатком этого устройства явля ется то, что имеющийся на большей части траектории запас по перегрузке, равный разности заданной допусти мой перегрузки и ее текущего значения, не используется для увеличения крутизны траектории, следовательно, уменьшения величины потери высоты. Кроме того, возможно управление движением самолета по жестко заданной программе. При этом компенсируется любое отклонение по высоте от заданной траектории. Однако отклонение вверх от траектории под действием восходящего турбулентного возмущения компенсировать нецелесообразно. так как оно способствует более быстрому набору безопасной высоты. Цель изобретения - повышение безопасности полета. Это достигается тем, что в известное устройство для.управления траекторией самолета при уходе на второй круг введенны блок детектирования, датчик перегрузки и третий сумматор, причем третий сумматор включен в цепь между задатчиком перегрузки и коммутатором, второй вход третьего сумматора связан с датчиком перегрузки, а третий вход соединен с задатчиком перегрузки, блок детектирования включен в цепь между выходом второго сумматора и входом пилотажного прибора, второй выход блока детектирования соединен с дополнительным входом второго запоминающего устройства. На чертеже представлена структурная схема устройства для управления траекторией самолета при уходе на второй круг. Оно содержит последовательно соединенные первый интегратор 1, первый сумматор 2, ограничитель 3, второй интегратор 4, второй сумматор 5, блок 6 детектирования и директорный пилотажный прибор 7, а также первый блок 8 умножения, датчик 9 угла наклона глиссады, первое запоминающее устройство 10, датчик 11 воздушной скорости, второй блок 12 умножения, задатчик 13 угла подъема траектории, датчики 14 и 15 угла тангажа и угловой скорости тангажа соответственно, переключающее устройство 16, датчик 17 высоты, второе запоминающее устройство 18, коммутатор 19, датчик 20 критического угла атаки, третий сумматор 21 задатчик 22 допустимой перегрузки, датчик 23 перегрузки и блок 24 синхронизации. Первый сумматор 2 подключен также своим вторьм входом к первому блоку 8 умножения, первый и второй входы которого соединены соответственно с датчиком 9 угла наклона глиссады и первым запоминающим устройством 10, вход первого запоминающего устройства 10 связан с датчиком 11 воздушной скорости и первым входом второго блока 12 5гмножения, соединенным вторым входом с задатчиком 13 угла подъема траектории, а выходом - с вторым входом ограничителя 3, второй сумматор 5 связан четвертым и пятым входами с да1чиками 14 и 15 угла танга жа и угловой скорости тангажа, втоpbiM входом - с выходом переключающего устройства 16, подключенного третьим входом к выходу второго запоминающего устройства 18, при этом третий вход сумматора 5 подключен к датчику 17 высоты, вход первого интегратора 1 связан через коммутатор 19 с датчиком 20 критического угла атаки, подключенным к второму входу коммутатора 19, и выходом третьего сумматора 21, два суммирующих входа которого подключе ны к задатчику 22 допустимой перегрузки, а вычитающий вход - к датчику 23 перегрузки, блок 24 синхронизации соединен с вторыми входами первого 1 и второго 4 интеграторов, первого 10 и второго 18 запоминающих устройств и переключающего устройства 16. Устройство для управления траекторией самолета при уходе на второй круг работает следующим образом. При принятии решения об уходе на второй круг блок 24 синхронизации вырабатывает сигнал, по которому первое 10 и второе 18 запоминающие устройства запоминают значения напряжений на своих входах, пропорциональные воздзтпной скорости и высоте полета в этот момент времени. По сигналу блока 24 синхронизации переключатель 16 подключается к входу второго сумматора 5 вместо датчика 17 высоты выход второго запоминающего устройства 18. Этим обеспечивается плавное (без скачков изменение управляющего сигнала. Одновременно первый 1 и второй 4 интеграторы переводятся в режим интег рирования напряжений, поступающих н их входы, величина и полярность которых определяют скорость изменения выходньрс напряжений интеграторов. На вход первого интегратора 1 через коммутатор 19 поступает напря жение с третьего сумматора 21. Оно складывается из напряжения на выходе задатчика 22 допустимой нормальной перегрузки и форсирующего сигнала в виде разности между допустимой перегрузкой, вводимой задатчиком 22, и текущей перегрузкой, изме ренной датчиком 23 перегрузки. Форсирующий сигнал пропорционален в каждый момент времени запасу по перегрузке. Если величина текущей перегрузки равна заданной, то форсирующий сигнал равен нулю и действует только составляющая, пропорциональная заданному допустимому значению перегрузки. Выходное напряжение первого интегратора 1 определяет изменение вертикальной скорости самолета при уходе на второй круг. Наличие форсирующего сигнала на входе интегратора 1 приводит к увеличению скоробти нарастания его выходного напряжения в соответствии с имеющимся запасом по перегрузке, т.е. приводит к увеличению вертикальной скорости самолета, а следовательно, к снижению величины потери скорости при выравнивании. Из выходного напряжения первого интегратора 1 в первом сумматоре 2 вычитается напряжение, пропорциональное вертикальной ск:орости самолета по глиссаде снижения. Это напряжение получается в первом блоке 8 умножения после перемножения напряжения, пропорционального.углу наклона глиссады, и напряжения, пропорционального воздушной скорости в момент принятия решения об уходе на второй круг, запомненного первым запоминающим устройством 10, Запоминание скорости необходимо для минимизации величины потери высоты при вьфавнивании, так как она пропорциональна скорости, при выравнивании последняя должна вьщерживаться постоянной. С выхода первого сумматора 2 напряжение поступает в ограничитель 3, где ограничивается сверху на уровне, равном выходному напряжению второго блока 12 умножения. Это напряжение определяет вертикальную скорость набора высоты и получается путем перемножения напряжений, пропорциональных воздушной скорости - датчика 11 скорости подъема - с задатчика 13 угла подъема траектории. Выходное напряжение ограничителя 3, пропорциональное заданной вертикальной скорости самолета при уходе на второй круг, интегрируется в реальном масштабе времени вторым интегратором 4. Его выходное напряжение, пропорциональное изменению высоты при выполнении маневра, складывается во втором сумматоре 5 с демпфирующими сигналами датчиков 14 и 15 уг- ;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления траекторией самолета при уходе на второй круг | 1979 |
|
SU909897A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ В РЕЖИМЕ ПОСАДКИ | 1982 |
|
SU1098174A1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ В РЕЖИМЕ УХОДА НА ВТОРОЙ КРУГ | 1984 |
|
SU1213653A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ САМОЛЕТА ПРИ УХОДЕ НА ВТОРОЙ КРУГ по авт. св. № 909897, отличающееся тем, что, с целью повышения безопасности полета, в него введены блок детектирования, датчик перегрузки и третий сумматор, причем третий сумматор включен в цепь между задатчиком перегрузки и коммутатором, второй вход третьего сумматора связан с датчиком перегрузки, а третий вход соединен с задатчиком перегрузки, блок детектирования включен в цепь между выходом второго сумматора и входом пилотажного прибора, второй выход блока детектирования соединен с дополнительным входом второго запоминающего устройства. (Л о ср 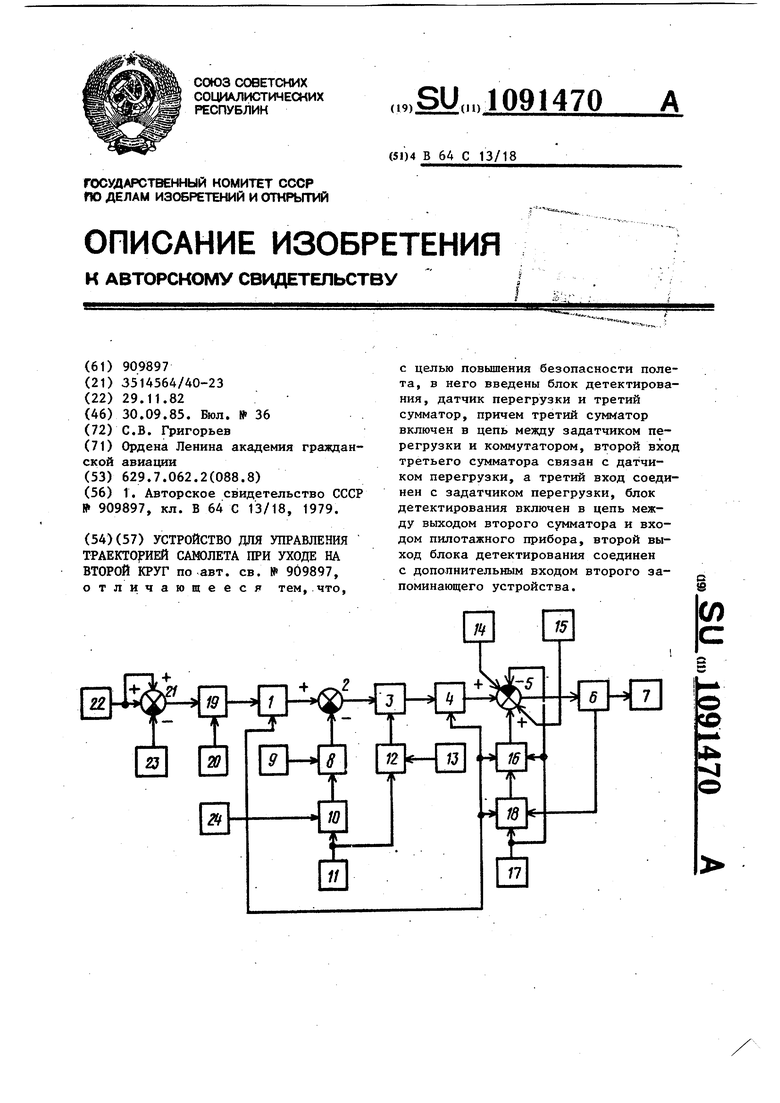
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления траекторией самолета при уходе на второй круг | 1979 |
|
SU909897A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
