
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА РАДИОУПРАВЛЯЕМОЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319191C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ ПОСАДКИ ПЛАНИРУЮЩЕЙ ПАРАШЮТНОЙ СИСТЕМЫ НА НАЗЕМНЫЙ РАДИОМАЯК | 1989 |
|
RU1777300C |

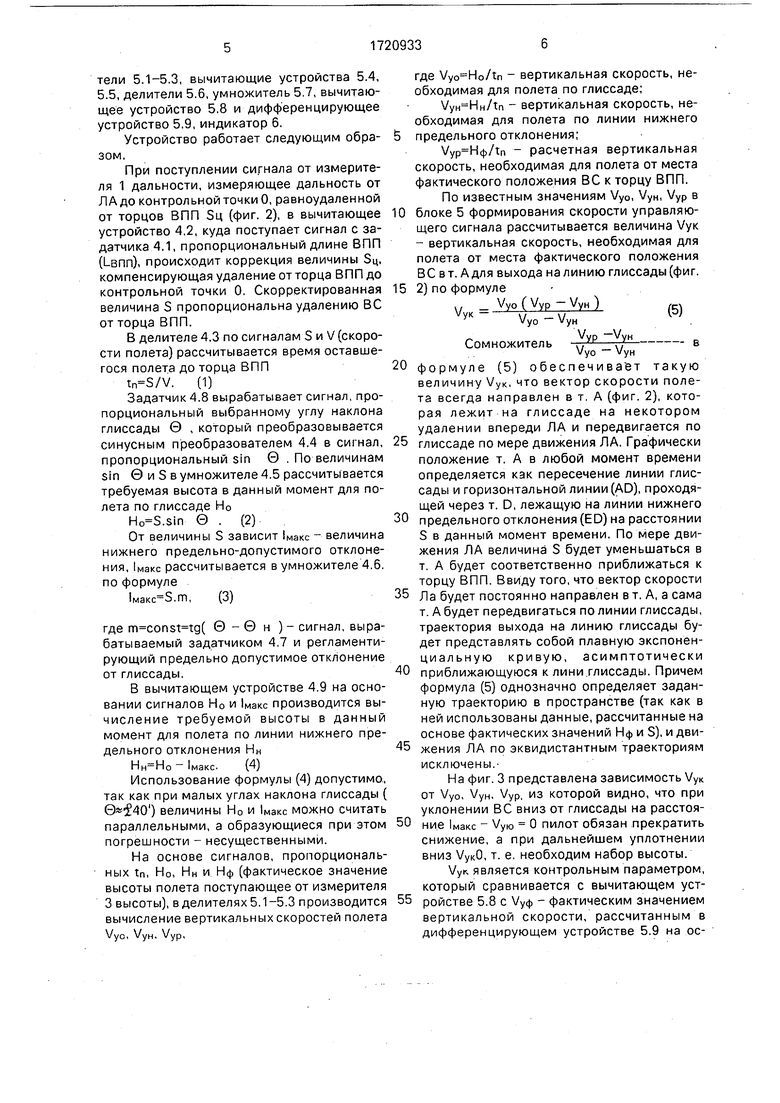
Изобретение относится к управлению летательными аппаратами, в частности к устройствам, обеспечивающим заход на посадку по глиссаде на аэродром без начального радиотехнического оборудования, Целью изобретения является повышение безопасности полета. Сущность изобретения сводится к учету при формировании управляющего сигнала зоны предельно допустимых отклонений от линии глиссады. Для этого блок 4 определения контрольных высот и времени полета на основе сигналов измерителя 1 дальности и заданного угла наклона глиссады формирует сигналы требуемых высот Н0 и Нн соответственно для полета по глиссаде и по линии нижнего предельного отклонения от глиссады. Затем в блоке 5 формирования управляющего сигнала вертикальной скорости на основе сигналов Н0, Нн. времени полета и фактического значения высоты полета определяются вертикальная скорость Vy0 для полета по глиссаде, вертикальная скорость Уун для полета по линии нижнего продольного отклонения,вертикальная скорость Vyp необходимая для полета от фактического положения летательного аппарата к торцу взлетно-посадочной полосы, и формируется управляющий сигнал VyK по скорости для выхода на линию глиссады по зависимости (Vyp - Vyn)/(Vyo - VyH). 3 ил. fe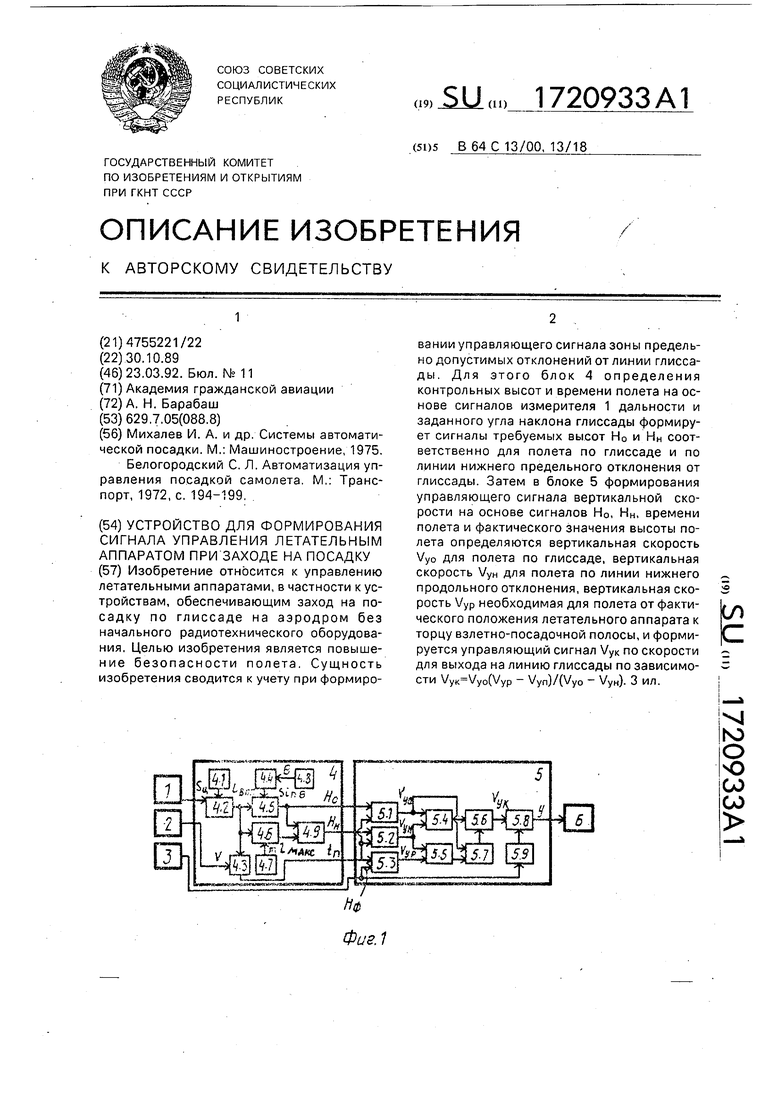
Фиг. 2.
Vy. (М/С).
г з
J/W«/cJ
| Михалев И | |||
| А | |||
| и др | |||
| Системы автоматической посадки | |||
| М.: Машиностроение, 1975 | |||
| Белогородский С | |||
| Л | |||
| Автоматизация управления посадкой самолета | |||
| М.: Транспорт, 1972, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
