Изобретение относится к транспорту и может быть использовано в системах контроля и учета работы транспортных средств, в устройствах счета осей, измерения скорости и ускорения движения железнодорожных составов.
Известно устройство для обнаружения движущегося по рельсам объекта (авт. св. N 1150133, кл. B 61 L 1/16, 18.03.83, опубл. в БИ N 14, 1985), содержащее установленные в выполненных в рельсе по разные его стороны полостях постоянные магниты и геркон, включенный в цепь сигнализации, при этом полости для геркона и постоянных магнитов расположены в головке немагнитных рельс-вставок, выполненных по профилю рельса, причем постоянные магниты установлены вертикально в полостях, расположенных вдоль внутренней стороны рельс-вставки, а ориентированы полюсами так, что их магнитные потоки направлены согласовано, а геркон установлен в полости, расположенной с наружной стороны рельс-вставки между указанными полостями с магнитами.
Однако вследствие того, что геркон, расположенный в головке немагнитной рельс-вставки, подвержен значительным вибрациям, что приводит к ложным срабатываниям, понижается надежность устройства. Кроме того, наличие рельс-вставки уменьшает надежность железнодорожного пути. Остановка колесной пары подвижной единицы на границах зоны действия рабочего потока магнитов может привести к возникновению дребезга контактов геркона, что будет воспринято как прохождение группы колес. Вследствие наличия рельс-вставки затрудняется применение устройства на магистральных железных дорогах оборудованных, электротягой и электрическими цепями.
Наиболее близким к заявляемому является устройство для обнаружения движущегося по рельсам объекта (авт. св. N 1477611, кл. B 61 L 1/16, 15.12.86., опубл. БИ N 17, 1989), содержащее установленный поперек рельсовой колеи магнит (в заявляемом решении - блок подмагничивания), два путевых датчика, выполненных магниточувствительными в виде феррозондов, выход каждого из которых соединен с блоком совпадения, один из датчиков установлен у одного из рельсов, а другой датчик - у другого рельса с возможностью их взаимодействия с колесами колесной пары, и расположены они после магнитов по направлению движения.
Причины, препятствующие получению требуемого технического результата, заключаются в следующем. Такое расположение путевых датчиков приводит к невозможности
функционирования устройства на электрофицированных участках пути за счет влияния тягового тока рельсов с разной полярностью на феррозонды;
определения направления движения подвижной единицы.
Кроме этого, при значительном удалении блоков подмагничивания от путевых датчиков возможно изменение полярности колесных пар, что приведет к невосприимчивости устройством таких осей.
В основу изобретения поставлена задача усовершенствования устройства для обнаружения движущегося по рельсам объекта, в котором исключение отказов в обнаружении колесных пар и контроль из направления обеспечивается возможностью воспринимать остаточную намагниченность колес любой полярности и за счет этого повышается надежность и функциональные возможности.
Поставленная задача достигается устройством для обнаружения движущегося по рельсам объекта, содержащем два блока подмагничивания, расположенных внутри рельсовой колеи, между которыми установлены соосно первый и второй путевые датчики, выполненные магниточувствительными, первый - внутри рельсовой колеи возле одного рельса с возможностью взаимодействия с одним из колес колесной пары, в которое согласно изобретению введены вычислитель, выдающий сигнал вхождения колесной пары в зону действия устройства, сигнал наличия ее в зоне действия устройства и сигнал прохождения ее колесной парой для определения направления движения объекта, и дополнительно третий и четвертый соосно установленные путевые датчики, выполненные магниточувствительными, причем третий установлен внутри рельсовой колеи возле одного рельса, а второй и четвертый - возле другого рельса снаружи рельсовой колеи, все датчики установлены на одинаковом расстоянии от рельсов, максимально приближенном к колесам колесных пар, а между собой - с возможностью одновременного взаимодействия с колесами колесных пар, при этом выходы первого, второго, третьего и четвертого путевых датчиков соединены соответственно с первым, вторым, третьим и четвертым входами вычислителя. Вычислитель содержит блоки совпадения и инверторы, причем вход первого инвертора и вход второго блока совпадения подключены к первому входу вычислителя, выход первого инвертора соединен с одним из входов первого блока совпадения, вход второго инвертора и другой вход первого блока совпадения подключены к второму входу вычислителя, выход второго инвертора соединен с другим входом второго блока совпадения, выход первого блока совпадения соединен с одними входами третьего, четвертого блоков совпадения и входом третьего инвертора, выходы третьего и четвертого блоков совпадения подключены к первому выходу вычислителя, вход четвертого инвертора и один из входов пятого блока совпадения подключены к третьему входу вычислителя, выход четвертого инвертора соединен с одним из входов шестого блока совпадения, вход пятого и другой вход шестого блоков совпадения подключены к четвертому входу вычислителя, выход пятого инвертора соединен с другим входом пятого блока совпадения, выход шестого блока совпадения соединен с другим входом третьего блока совпадения, одним из входов седьмого блока совпадения и входом шестого инвертора, выходы шестого и третьего инверторов соединены соответственно с другими входами четвертого и седьмого блоков совпадения, выход седьмого блока совпадения подключен к второму выходу вычислителя, выход второго блока совпадения соединен с одними из входов восьмого, девятого блоков совпадения и седьмым входом инвертора, выходы восьмого и девятого блоков совпадения подключены к третьему выходу вычислителя, выход пятого блока совпадения соединен с другими входами десятого, восьмого блоков совпадения и входом восьмого инвертора, выходы седьмого и восьмого инверторов подключены соответственно к другим входам девятого и десятого блоков совпадения, выход десятого блока совпадения подключен к четвертому выходу вычислителя.
Введение отличительных признаков в совокупности позволит отфильтровать полезный сигнал от импульсов помех, что приводит к повышению отказоустойчивости и позволит применять устройство на электрофицированных участках пути, а также реагировать на колесные пары с различной полярностью.
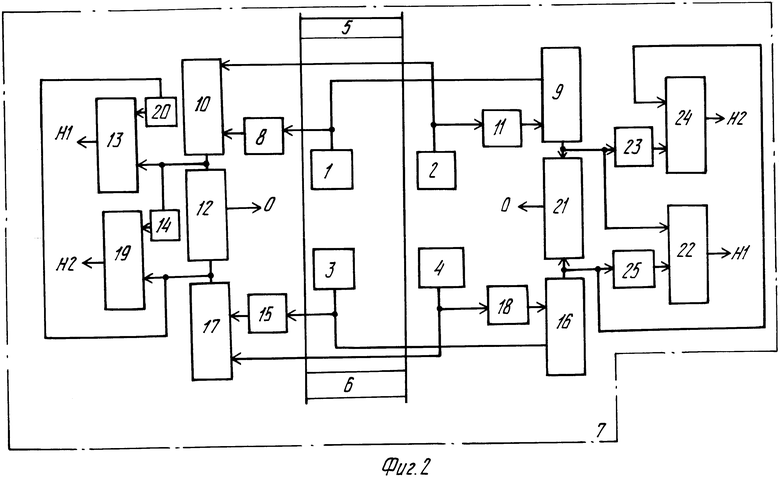
На фиг. 1 представлена функциональная схема заявляемого устройства; на фиг. 2 - то же, с раскрытой блок-схемой определителя направления движения объекта.
Устройство для обнаружения движущегося по рельсам объекта состоит (фиг. 1) из четырех магниточувствительных путевых датчиков (феррозондов) 1, 2, 3 и 4, причем первичные преобразователи первого и второго датчиков находятся на одной оси, а третьего и четвертого - на другой. Расстояние L2 между этими осями выбирается из условия одновременного срабатывания феррозондов под действием колес колесной пары. Расстояние L1 между феррозондами и рельсами выбирается из условия максимального приближения к колесной паре с соблюдением габаритов. Устройство также содержит блоки подмагничивания 5 и 6, вычислитель 7, который состоит из блоков совпадения и инверторов (фиг. 2). Вход первого инвертора 8 и второго блока совпадений 9 соединены с выходом первого путевого датчика 1, а выход первого инвертора 8 связан с одним входом первого блока совпадения 10. Выход второго путевого датчика 2 подключен к входу второго инвертора 11 и к второму входу первого блока совпадения 10, выход второго инвертора 11 соединен с другим входом второго блока совпадения 9, при этом выход первого блока совпадения 10 связан с одним входом третьего 12, четвертого 13 блоков совпадения и входом третьего инвертора 14. Выходы третьего 12 и четвертого 13 блоков совпадения подключены к соответствующим выходным шинам вычислителя 7. Выход третьего датчика 3 соединен с входом четвертого инвертора 15 и с одним входом пятого блока совпадения 16. Выход четвертого инвертора 15 связан с одним из входов шестого блока совпадения 17. Выход четвертого путевого датчика 4 подключен к входу пятого инвертора 18 и к второму входу шестого блока совпадения 17, а выход пятого инвертора 18 соединен с другим входом пятого блока совпадения 16, при этом выход шестого блока совпадения 17 связан с вторым входом третьего блока совпадения 12, одним входом седьмого блока совпадения 19 и входом шестого инвертора 20, а выход шестого и третьего инверторов подключены к соответствующим вторым входам четвертого 13 и седьмого 19 блоков совпадения. Выход седьмого блока совпадения 19 подключен к соответствующим шинам вычислителя. Выход второго блока совпадения 9 связан с одним входом восьмого 21, девятого 22 блоками совпадения и седьмым инвертором 23, а выходы восьмого 21 и девятого 22 блоков совпадения подключены к соответствующим выходным шинам вычислителя, при этом выход пятого блока совпадения 16 соединен с вторым входом десятого блока совпадения 24, с другим входом восьмого блока совпадения 21 и входом восьмого инвертора 25. Выходы седьмого 23 и восьмого 25 инверторов подключены к соответствующим вторым входам девятого 22 и десятого 24 блоков совпадения, при этом выход десятого блока совпадения 24 подсоединен к соответствующей выходной шине вычислителя 7. Колесная пара 26 показана на фиг. 1.
Предлагаемое устройство для обнаружения движущегося по рельсам объекта работает следующим образом.
Блоки подмагничивания 5 и 6 обеспечивают намагничивание колесных пар 26 подвижного состава, проходящих в зоне действия устройства. При вхождении предварительно намагниченных колесных пар 26 с одним южным, а другим северным колесом, в зону действия феррозондов 1, 2, 3, 4 на их выходах появляются сигналы, так как феррозонд является датчиком активного типа, преобразующим действующую на него напряженность внешнего постоянного поля в электрический сигнал (Афанасьев К.В. Феррозонды. Л-д: Энергия, 1969, с. 168). В результате в зависимости от колеса, находящегося над феррозондом, сигнал имеет отрицательную или положительную величину. В зависимости от этого срабатывают блоки совпадения (в зависимости от направления движения подвижного состава) 12 или 21 и 19 или 13 или 22 или 24 и на выходах сработавших блоков появляется сигнал, информирующий о направлении движения колесных пар и нахождении их в определенной точке пути. Рассмотрим работу вычислителя 7 при прохождении колесной пары справа налево. В исходном положении на выходах феррозондов 3 и 4 отсутствует сигнал. При нахождении колеса с южным полюсом над феррозондом 4 и северным над феррозондом 3, на выходе феррозонда 4 появляется положительный сигнал, а на выходе феррозонда 3 - отрицательный. В результате этого на выходе инвертора 15 возникает положительный сигнал, а значит на входах блока совпадения 17 появляются положительные импульсы, которые открывают блок совпадения 17 и на его выходе образуется положительный сигнал, который воздействует на один из входов блока совпадения 19, на другом входе которого в исходном положении также подается положительный импульс и как следствие блок совпадения 19 срабатывает, при этом на его выходе появляется сигнал, информирующий о приближении колеса к зоне срабатывания устройства. Этот сигнал выводится на выходную шину вычислителя 7. Когда колесная пара входит в зону срабатывания всех феррозондов на выходе феррозондов 1 и 2, появляются соответственно положительный и отрицательный импульсы, под действием которых срабатывает блок совпадения 10 и на выходе которого положительный импульс. В результате образования положительных сигналов на выходах блоков совпадения 10 и 17 на входы блока совпадения 12 подается положительный импульс и как следствие он срабатывает и на выходе его появляется сигнал, информирующий о наличии колесной пары в зоне срабатывания устройства. Этот сигнал подается на соответствующую выходную шину вычислителя 7. После проследования колесной парой зоны срабатывания устройства на феррозондах 3 и 4 отсутствует сигнал, а на феррозондах 1 и 2 в первый момент еще остаются сигналы той же полярности. В результате на выходе блока совпадения 17 появляется отрицательный импульс и как следствие срабатывает инвертор 20, при этом с выхода которого подается сигнал на один вход блока совпадения 13 и так как в это время на другой вход подается положительный импульс от блока совпадения 10, то блок совпадения 13 срабатывает, а на выходе его появляется сигнал информирующий о прохождении колесной парой зоны срабатывания устройства справа налево. Аналогичным образом работает вычислитель 7 при смене направления движения колеса и при изменении полярности на колесах колесной пары.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения движущегося по рельсам объекта | 1990 |
|
SU1791239A1 |
| ПУТЕВОЙ ИНДУКТИВНЫЙ ДАТЧИК | 1995 |
|
RU2102267C1 |
| Устройство для обнаружения колесных пар движущегося по рельсам транспортного средства | 1991 |
|
SU1787847A1 |
| Устройство для опознавания рельсовых транспортных средств | 1988 |
|
SU1615016A1 |
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2025357C1 |
| Устройство для измерения скорости проследования подвижного состава | 1990 |
|
SU1787846A1 |
| Устройство для автоматического регулирования скорости скатывания отцепов | 1988 |
|
SU1643271A1 |
| Устройство для измерения вертикальных и боковых сил взаимодействия между колесом и рельсом | 1985 |
|
SU1312412A1 |
| Устройство для автоматической маркировки железнодорожных единиц подвижного состава | 1987 |
|
SU1507633A1 |
Использование: в системах контроля и учета работы транспортных средств , который обеспечивается возможностью воспринимать остаточную намагниченность колес любой полярности. Сущность изобретения: устройство содержит два блока подмагничивания, расположенных внутри рельсовой колеи, между которыми установлены соосно две пары магниточувствительных путевых датчиков, причем первые из каждой пары - возле одного рельса внутри рельсовой колеи, а вторые - снаружи рельсовой колеи возле другого рельса, все на одинаковом расстоянии от рельсов, максимально приближенном к колесам колесных пар, а между собой пары - с возможностью одновременного взаимодействия с колесами колесных пар, при этом выходы путевых датчиков подключены соответственно к входам вычислителя. 1 з.п.ф-лы, 2 ил.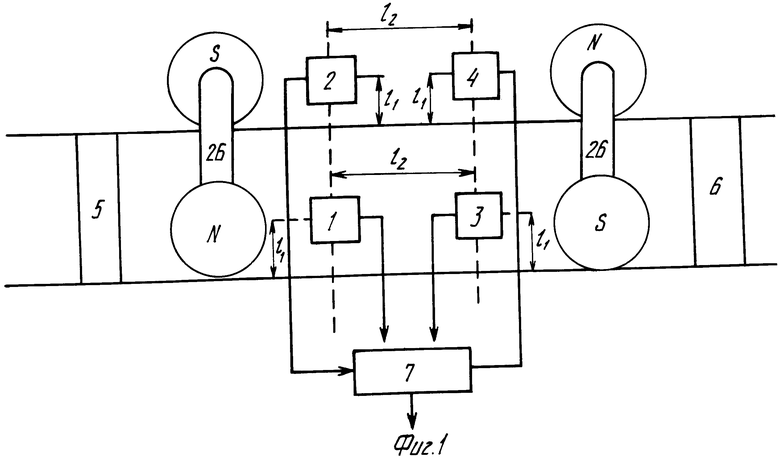
| SU, авторское свидетельство, 1477611, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
