О
W
ю
VI
Изобретение относится к области железнодорожного транспорта и может быть использовано для автоматического регулирования скорости скатывания-отцепов на сортировочных горках.
Цель изобретения - повышение надежности.
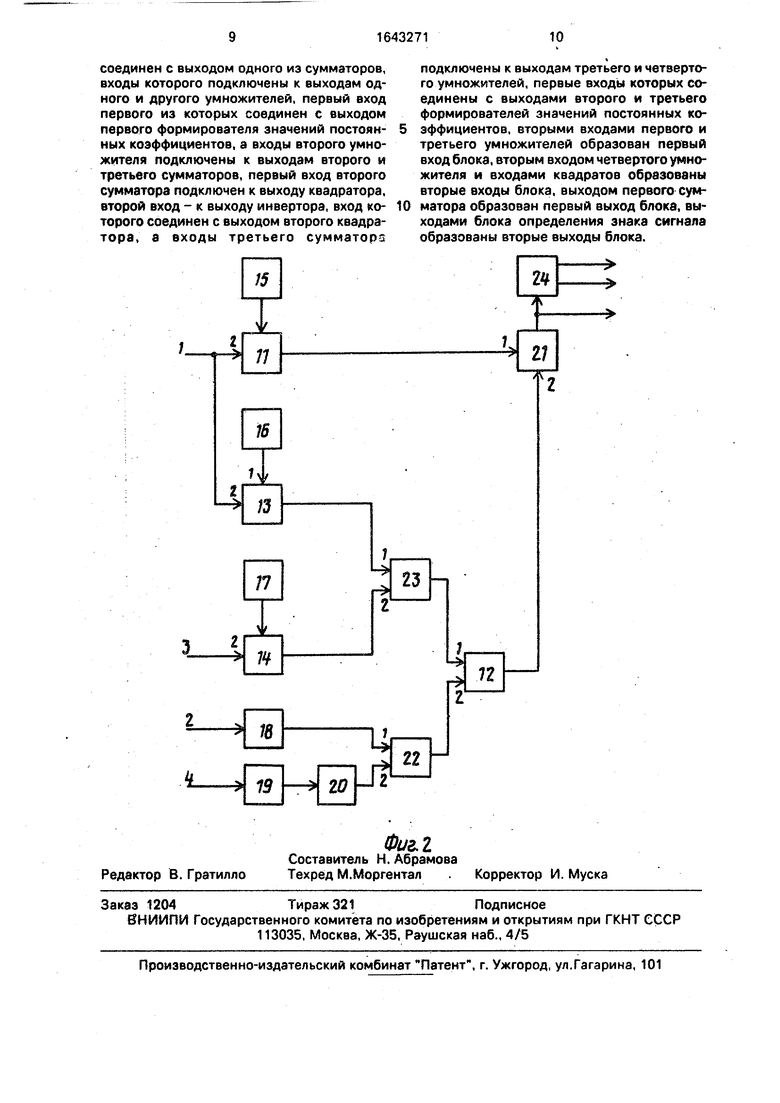
На фиг.1 показана структурная схема устройства для автоматического регулирования скорости скатывания отцепов; на фиг.2 - структурная схема блока выбора режима работы устройства.
Устройство для автоматического регулирования скорости скатывания отцепов со- держит блок 1 предварительного намагничивания колесных пар скатывающегося отцепа, воздействующий на движущиеся колесные пары скатывающегося отцепа 2, блок 3 накопления информации об отцепах, блок 4 задания скорости движения отцепа, блок 5 включения регуляторов скорости движения отцепа, блоки 6.1-6.3 формирования сигналов прохождения колеса, электромагнитные регуляторы 7.1-7.3 ско- рости движения отцепа, ключевые элементы 8.1-8.3, блоки 9.1-9.3 совпадения и блок 10 выбора режима работы, рдин из входов которого соединен с выходом блока 4, другие выходы - с выходами блока 3, один из выходов - с входом блока 5, а другие выходы - с одними из входов ключевых элементов 8.1-8.3 и входами блоков 6,1-6.3, выходы которых подключены к первым входам блоков 9.1-9.3 совпадения, вторые входы каж- дого из которых соединены с выходами блока 5, а выходы - с другими входами ключевых элементов 8.1-8.3, выходы которых подключены к регуляторам 7.1-7.3.
Блок 10 выбора режима работы устрой- ства содержит умножители 11-14. формирователи 15-17 значений постоянных коэффициентов, квадраторы 18 и 19, инвертор 20, сумматоры 21-23 и элемент 24 определения знака сигнала, вход которого соединен с выходом сумматора 21, входы которого подключены к выходам умножителей 11 и 12, входы умножителей 11, 13 и 14 подключены соответственно к выходам формирователей 15-17. Входы умножителя 12 подключены к выходам сумматоров 22 и 23, первый вход сумматора 22 подключен к выходу квадратора 18, а второй вход - к входу инвертора 2, вход которого соединен с входом квадратора 19, а входы сумматора 23 подключены к выходам умножителей 13 и 14.
Устройство для автоматического регулирования скорости скатываний отцепов работает следующим образом.
Блок 1 предварительного намагничивания колесных пар скатывающегося отцепа представляет собой магнитопровод с обмоткой, выполненной таким образом, чтобы можно было превратить колесную пару или часть ее в постоянный магнит. Блок 3 накопления информации об отцепах представляет собой набор датчиков с элементами памяти, измеряющих и фиксирующих скорость входа отцепа на тормозную позицию VQ, массу отцепа m и число осей N отцепа 2. Блок 10 выбора режима работы - это вычислитель, реализующий определенный алгоритм работы устройства в зависимости от параметров движения отцепа.
Уравнение энергетического равновесия для отцепа, проходящего участок тормозной позиции при отключенных электромагнитных регуляторах скорости, имеет вид
m vl . . . - + mgho +
-N
+ mghi +
Ifiji
N
О)
где ho и hi - соответственно энергетические высоты до и после выхода отцепа из тормозной позиции;
mKR
- момент инерции колесной
пары;
т - масса колесной пары;
g - ускорение свободного падения;
R - радиус колеса;
ТГ
Б соответственно угловые к
скорости вращения колесных пар до входа и после выхода отцепа из тормозной позиции при отключенных электромагнитных регуляторах скорости.
В том случае, если включены электромагнитные регуляторы скорости, последние либо отнимают часть энергии у движущегося под действием инерции и силы тяжести отцепа (режим замедления), либо добавляют энергию (режим ускорения). В этом случае уравнение (1) будет иметь вид
mv°- + mgh0-f.
N
mghi +
N ± k A , (2)
где V2 - заданная скорость выхода отцепа из тормозной позиции;
(U2
V2
заданная угловая скорость
вращения колесной пары после выхода отцепа из тормозной позиции;
k - число электромагнитных регуляторов скорости;
А - работа (энергия), выполняемая одним электромагнитным регулятором скорости по замедлению или ускорению отцепа.
Преобразуя формулу (2), запишем уравнение, определяющее количество электромагнитных регуляторов скорости, которые необходимо включить, чтобы задать отцепу с параметрами движения m, N, VQ скорость V2,
g()} +
+ (vS-v2)(-Јr +
mkN 4A
)}
Так как ho, hi, g, А, гпк для конкретных подвижного состава, тормозной позиции и электромагнитного регулятора скорости являются величинами постоянными, то уравнение (3) можно записать в виде К ±fmCi + (vo2 - V22) (mC2 + NCa) , (4) ( h0 - hi) „. 1
где Ci g
C2
2 A
fflk Сз л д постоянные коэффициенты.
Знак - перед правой частью выражения (4) справедлив в случае необходимости замедления отцепа, а знак + - в случае ускорения. Работу, выполняемую одним электромагнитным регулятором скорости, можно оценить с помощью известной методики либо измерить в каждом конкретном случае.
Алгоритм, описываемый формулой (4), реализуется блоком 10 выбора1 режима работы устройства. Скорость выхода отцепа из тормозной позиции V2 может быть задана вручную или автоматически с помощью блока 4 задания скорости выхода отцепа из тормозной позиции, который представляет собой устройство для задания постоянных коэффициентов.
Эти постоянные коэффициенты пропорциональны и равны скорости va. При задании этих коэффициентов учитываются длины отцепов и путей подгорочного парка, парусность вагонов, вид подшипников и т.д.
Блок 5 представляет собой набор компараторов (по числу регуляторов), входы которых соединены между собой и подключены к выходу блоха 4. Каждый компаратор срабатывает от своего заранее заданного уровня сигнала, поступающего из блока 10.
Каждый из блоков 7.1-7,3 совпадения срабатывает лишь в том случае, если и по первому, и по второму входам поступают сигналы, причем последние могут приходить и неодновременно.
Элементы 8.1-8.3 могут запитывать электромагнитные регуляторы 7.1-7,3 скорости током одного или другого направления в зависимости от того, по какому из входов поступит управляющая команда из блока 10.
Электромагнитные регуляторы 7.1-7.3 располагаются таким образом, что рельсы являются полюсными наконечниками электромагнита. При установке сердечников электромагнитных регуляторов скорости на расстоянии, превышающем длину колеса
0 наибольшего диаметра (около 3,3 м), рабочие магнитные потоки, создаваемые электромагнитами, практически перестают шунтироваться рядом расположенными сердечниками и замыкаются через проходя5 щие колесные пары.
Каждый из блоков 6.1-6.3 состоит из двух датчиков положения колесной пары, причем первый из датчиков устанавливается в начале зоны действия электромагнитно0 го регулятора скорости и срабатывает (включается) при прохождении над ним колесной пары и одновременно поступлении управляющего сигнала на первый управляющий вход. Первый датчик положения ко5 лесной пары находится в рабочем состоянии только в режиме ускорения отце- . пов. Второй датчик положения колесной пары устанавливается таким образом, чтобы фиксировать положение колесной пары в
0 момент ее нахождения над центром магми- топровода электромагнитного регулятора скорости, и переходит в рабочее состояние лишь в случае поступления управляющего сигнала на второй управляющий вход, т.е. в
5 режиме замедления. Выходы первого и второго датчиков положения колесной пары соединены с входом блока ИЛИ, выход которого является выходом блока путевых датчиков. Следовательно, колесная пара,
0 накатывающаяся на электромагнитный регулятор скорости, до момента пересечения центра электромагнита будет притягиваться последним, а сила притяжения и направление движения будут совпадать. Колесная
5 пара в этом случае ускоряется. При дальнейшем дви&ении по электромагнитному регулятору скорости направления движения и силы притяжения будут противоположны, а колесная пара в этом случае замедляется.
0 Устройствами, фиксирующими необходимые моменты времени а процессе движения, являются датчики положения колесной пары.
.Сила притяж ения зависит от величины
5 магнитного потока, замыкающегося через колесную пару, который может возрастать лишь до насыщения магнитной цепи либо ее отдельного элемента. Значение потока насыщения определяется материалом и сечением магнитолровода. Сечение сердечника
электромагнита всегда можно выбрать достаточным для прохождения необходимого магнитного потока, поэтому его максимальное значение определяется сечением оси колесной пары. Чтобы увеличить силу притяжения необходимо предварительно за- магнитить колесные пары или их части, превратив последние в постоянные магниты. В результате к электромагнитному регулятору скорости колесная пара подходит намагниченной и происходит взаимодействие постоянного магнита и электромагнита. А это взаимодействие при определенном направлении поля электромагнита всегда больше нежели взаимодействие электромагнита и просто ненамагниченного ферромагнитного тела (в данном случае колесной пары). С помощью управляемых блоков 8 питания можно создать необходимое направление поля электромагнита для увеличения силы притяжения.
Колесные пары отцепа 2, прошедшие обработку блоком 1 предварительного намагничивания колесных пар скатывающегося отцепа, идентифицируются с помощью блока 3 накопления информации об отцепах. Информация о скорости входа отцепа на тормозную позицию vo, массе отцепа m и числе осей отцепа N поступает на три входа блока 10 выбора режима работы устройства.
От блока 4 на блок 5 поступает информация о требуемой скорости выхода отцепа из тормозной позиции V2. Блоком 10 реализуется зависимость между перечисленными характеристиками отцепа и постоянными коэффициентами (Ci, €2 и Сз). которые заданы предварительно и характеризуют работу, выполняемую электромагнитными регуляторами 7.1-7.3, энергетическую высоту тормозной позиции, массу тележки и ускорение свободного падения. Эта зависимость описывается уравнением (4). Блоком 10 определяется также знак получаемого результата.
В том случае, если знак выходного сигнала на первом выходе блока положительный, следовательно, отцеп необходимо ускорить и на втором выходе блока 10 появляется управляющий сигнал, который переводит оба датчика положения колесной пары каждого из блоков 6.1-6.3 в рабочее состояние, а также дает команду по одному из входов на запитку каждого из электромагнитных регуляторов 7.1-7.3 скорости током прямой полярности, который усиливает взаимодействие электромагнита одного из регуляторов 7.1-7.3 скорости и постоянного магнита (намагниченных колесных пар). Сигнал определенного уровня с выхода блока 10 поступает на вход блока 5. Так как уровень данного сигнала пропорционален числу электромагнитных регуляторов скорости, необходимкх для увеличения скорости
VQ до V2, то на выходах блока 5 появится сигнал и будет дана команда на включение, например, ускорителей, т.е. электромагнитных регуляторов скорости, работающих в режиме ускорения.
Однако они будут включены лишь тогда, когда в зоне действия соответствующих путевых датчиков появятся колесные пары отцепа, а это возможно лишь после выбора режима работы устройства. В данном случае после срабатывания одного из блоков 6.1-6.3 включатся последовательно во времени на ускорение соответствующие электромагнитные регуляторы скорости, а в тот момент, когда колесная пара будет находиться над центрами электромагнитов, последние будут обесточены и их воздействие прекратится. Таким образом, осуществится цикл ускорения отцепа.
25
Формула изобретения
1, Устройство для автоматического регулирования скорости скатывания отцепов, содержащее блок накопления информации
об отцепах, блок задания скорости движения отцепа, блок включения регуляторов скорости движения отцепа и блок формирования сигналов, прохождения колеса, о т- личающееся тем, что, с целью повышения надежности, оно снабжено электромаг- нитными регуляторами скорости, ключевыми элементами, блоками совпадения и блоком выбора режима работы, один из входов которого соединен с выходом блока задания скорости движения отцепа, другие входы - с выходами блока накопления информации об отцепах, один из выходов - с входом блока включения регуляторов скорости движения отцепа, а другие выходы с одними из входов ключевых элементов и входами блоков формирования сигналов прохождения колеса, выходы которых подключены к первым входам блоков совпадения, вторые входы каждого из которых
соединены с выходами блока включения регуляторов скорости, а выходы - с другими входами ключевых элементов, выходы которых подключены к обмоткам электромагнитных регуляторов скорости.
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что блок выбора режима работы содержит умножители, формирователи значений постоянных коэффициентов, сумматоры, квадраторы, инвертор и элемент определения знака сигнала, вход которого
соединен с выходом одного из сумматоров, входы которого подключены к выходам одного и другого умножителей, первый вход первого из которых соединен с выходом первого формирователя значений постоянных коэффициентов, а входы второго умножителя подключены к выходам второго и третьего сумматоров, первый вход второго сумматора подключен к выходу квадратора, второй вход - к выходу инвертора, вход которого соединен с выходом второго квадратора, а входы третьего сумматора
0
подключены к выходам третьего и четвертого умножителей, первые входы которых соединены с выходами второго и третьего формирователей значений постоянных коэффициентов, вторыми входами первого и третьего умножителей образован первый вход блока, вторым входом четвертого умножителя и входами квадратов образованы вторые входы блока, выходом первого сумматора образован первый выход блока, выходами блока определения знака сигнала образованы вторые выходы блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОВРЕЖДЕНИЯ ВАГОНОВ ПРИ ЗАГРЯЗНЕНИИ БАНДАЖЕЙ КОЛЕСНЫХ ПАР ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2016 |
|
RU2634054C1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| Устройство для автоматического управления торможением автомобиля в потоке | 1989 |
|
SU1661018A1 |
| Устройство для оценки отношения корреляционных моментов | 1984 |
|
SU1164741A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА И ДЛИТЕЛЬНОСТИ ОДИНОЧНОГО СВЕРХШИРОКОПОЛОСНОГО КВАЗИРАДИОСИГНАЛА ПРОИЗВОЛЬНОЙ ФОРМЫ | 2022 |
|
RU2797258C1 |
| Устройство для автоматического управления торможением поезда | 1989 |
|
SU1676896A1 |
| Устройство для автоматического регулирования скорости отцепов на тормозной позиции | 1986 |
|
SU1388344A1 |
| Система контроля и управления заграждающими устройствами | 2024 |
|
RU2830327C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРУЖИННО-ГИДРАВЛИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2013 |
|
RU2550005C1 |
| УСТРОЙСТВО ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ СКОРОСТИ СКАТЫВАНИЯ ОТЦЕПОВ | 1970 |
|
SU428970A1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для регулирования скорости скатывания отцепов на сортировочной горке. Цель изобретения - повышение надежности. Устройство содержит блок 3 накопления информации об отцепах, блок 4задания скорости движения отцепа, блок 5включения регуляторов. Поставленная цель достигается воздействием блока 10 выбора режима работы на электромагнитные регуляторы 7.1-7.3 скорости движения отцепа в зависимости от необходимости замедления или ускорения отцепа. 1 з.п. ф-лы, 2 ил.
| Атаманенко Е.Т | |||
| и др | |||
| Способ автомати зации расформирования составов на сорти ровочных горках,- Автоматика телемеханика и связь, 1987, Мг 6, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
