Изобретение относится к машиностроению, а именно к средствам активной виброизоляции различных объектов.
Известен способ виброизоляции по авт.св. N 1521955, кл. F 16 F 15/06, 1987, заключающийся в том, что виброизолируемому объекту обеспечивают минимальное перемещение по пяти направлениям с использованием дополнительной платформы с шарнирно-рычажными механизмами.
Наиболее близким к предлагаемому является способ виброизоляции по авт. св. N 1087717, кл. F 16 F 15/00, 1981, заключающийся в том, что на объекте и на основании устанавливают акселерометры, а между ними размещают датчик относительного перемещения и активный исполнительный орган с устройством управления, обеспечивающим минимум перемещения виброизолируемого объекта.
Недостатком известного способа является сравнительно невысокая эффективность активной виброизоляции в области низких частот, начиная от нуля из-за отсутствия в системе управления возможности вырабатывать исполнительным органом скорость, равную по величине и обратную по знаку абсолютной скорости основания, т.е. отсутствие инвариантного управления в устройстве управления.
Задачей изобретения является повышение эффективности виброизоляции на низких частотах путем введения инвариантного управления, обеспечивающего полную остановку в инерциальном пространстве защищаемого объекта.
Это достигается тем, что в способе виброизоляции, заключающемся в том, что на объекте и на основании устанавливают акселерометры, а между ними размещают датчик относительного перемещения и активный исполнительный орган с устройством управления, обеспечивающим минимум перемещения объекта, устройство управления дополнительно содержит цифровой регулятор, а между объектом и основанием вводят дополнительную упруго-демпфированную площадку с расположенным на ней динамометром, а исполнительный орган размещают между объектом и этой площадкой, устанавливают на нем датчик скорости и выполняют его в виде генератора скорости, причем сигналы с акселерометров, датчиков скорости и относительного перемещения и динамометра направляют в цифровой регулятор, выход которого связан с входом исполнительного органа, причем устройство управления работает в двух режимах, один из которых связан с использованием инвариантного управления при помощи наблюдателя состояний для случая, когда относительное перемещение объекта не выходит за допустимый уровень и генератор скорости с учетом абсолютной скорости движения дополнительной площадки создает относительную скорость, равную ей по величине и противоположную по направлению, а второй режим связан с использованием пропорционального регулятора с позиционированием уровня для случая, когда относительное перемещение объекта выходит за допустимый уровень перемещений.
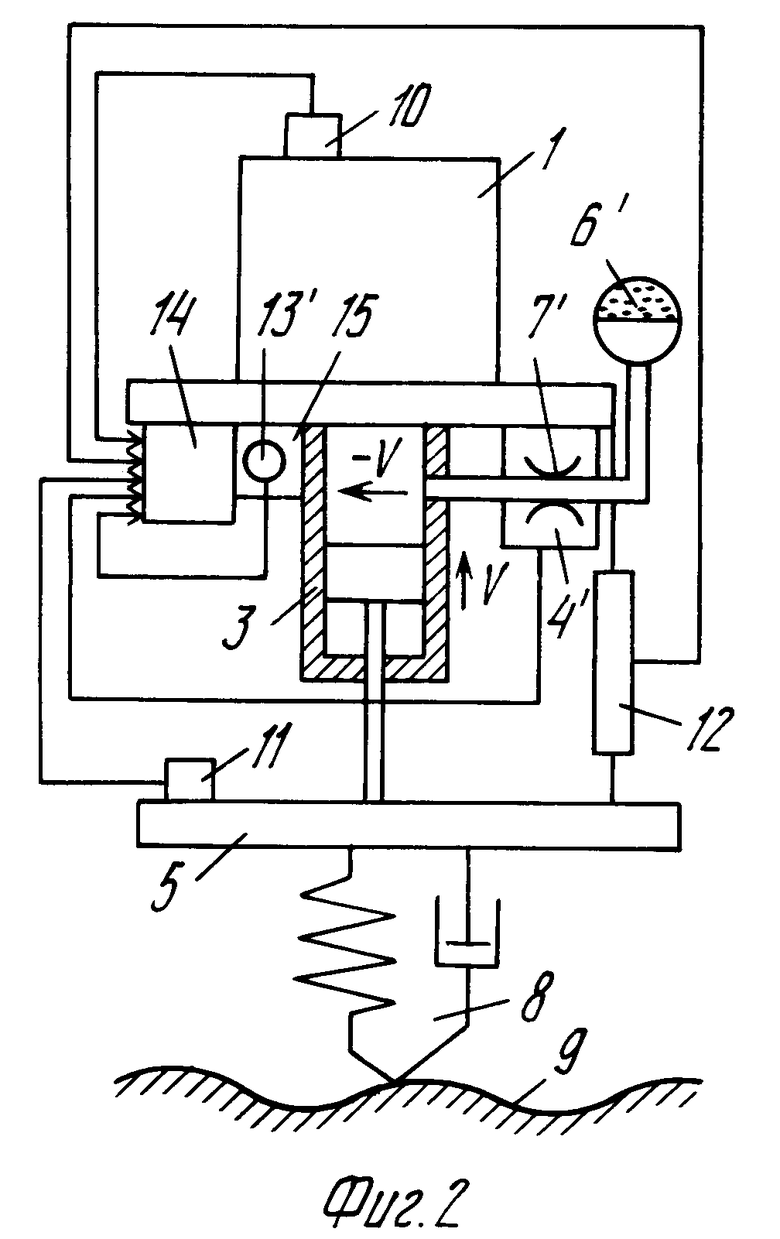
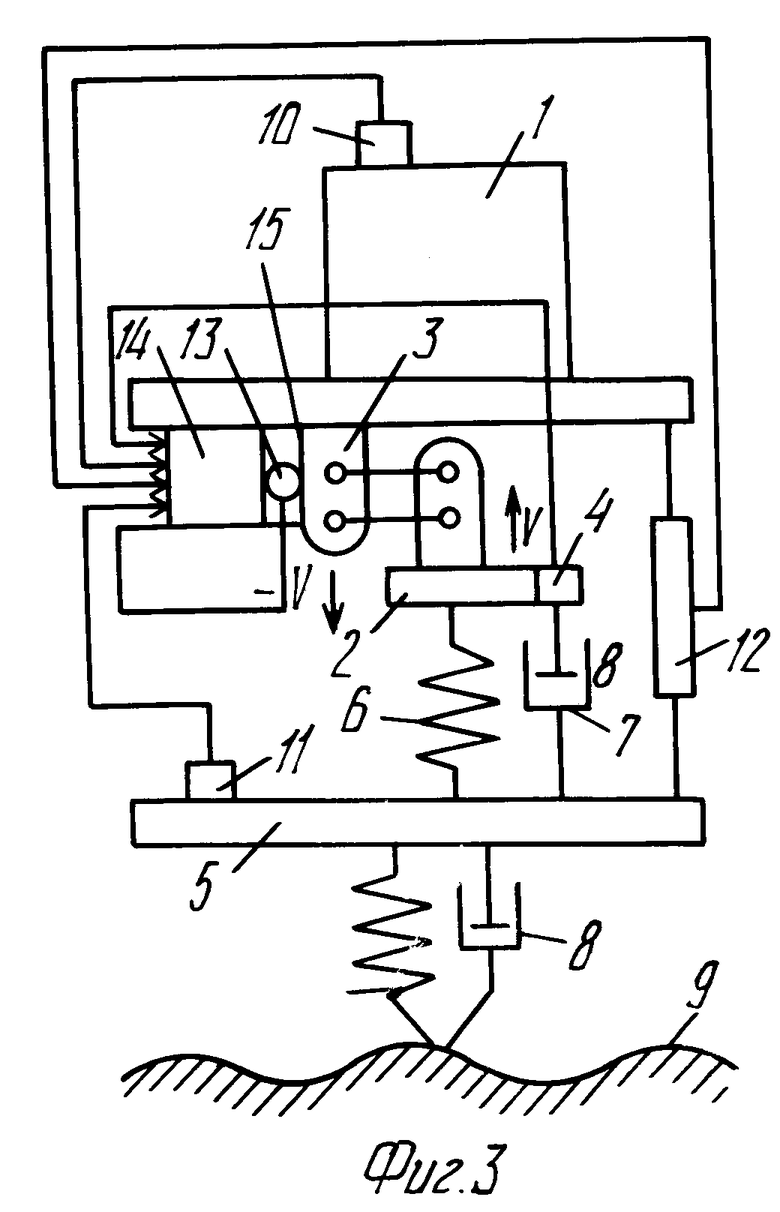
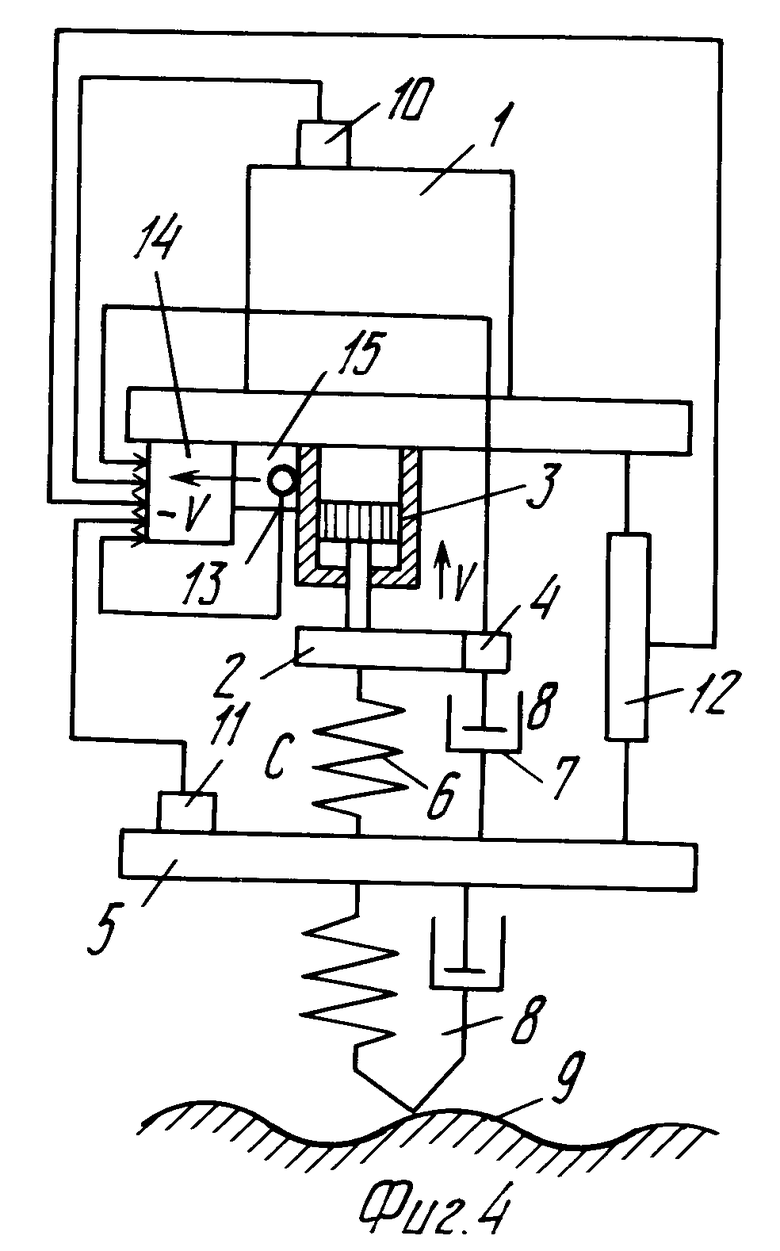
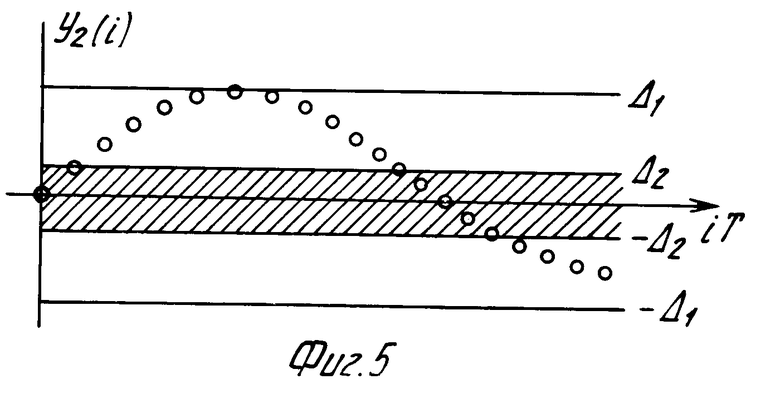
На фиг.1 показана обобщенная схема для реализации предложенного способа; на фиг.2, 3, 4 - схемы реализации способа соответственно с помощью гидропневматической, электромеханической и гидромеханической систем управления; на фиг. 5 - схема гистерезисного алгоритма включения-выключения режимов работы системы управления.
Способ виброизоляции осуществляют следующим образом.
Объект 1 виброзащиты устанавливают на дополнительную упруго-демпфированную площадку 2 (см. фиг.1, 3, 4) через исполнительный орган 3, выполненный в виде генератора скорости, на площадке 2 устанавливают динамометр 4 (для схем на фиг.1, 3, 4) или расходомер 4' (для схемы на фиг.2). Площадку 2 связывают с промежуточной платформой 5 через пружину 6 (для схем на фиг.1, 3, 4) или гидроаккумулятор 6' для схемы на фиг.2) и демпфер 7 (для схем на фиг.1, 3, 4) или дроссель 7' (для схемы на фиг.2). Промежуточная платформа 5 имеет упруго-демпфирующую связь 8 с неровным основанием 9. На объекте 1 и промежуточной платформе 5 устанавливают акселерометры 10 и 11, а между ними - датчик 12 относительного перемещения. На исполнительном органе 3 размещают датчик 13 скорости (для схем на фиг.1 и 3) или датчик расхода 13' (для схемы на фиг. 2 и 4). Исполнительный орган для электромеханической системы управления (см. фиг.3) выполнен в виде червячного редуктора с электродвигателем (на чертежах не показано) и рычажным параллелограммным механизмом. Для гидропневматической и гидромеханической систем - это гидроцилиндр с поршнем. Выходные сигналы с датчиков скорости, относительного перемещения, акселерометров и динамометра поступают в цифровой регулятор 14, который по существу является бортовым компьютером в цепи управления и который через преобразователь 15 (например, электрогидравлический для схемы на фиг.4) вырабатывает для исполнительного органа управляющее воздействие в зависимости от соотношений относительного перемещения и допустимого уровня.
Алгоритм работы компьютера 14 основан на применении цифрового наблюдателя состояний. Система виброизоляции имеет два режима работы, обеспечиваемых переключением программ в зависимости от невыхода или выхода за допустимый уровень относительных перемещений.
Первый режим (I)- инвариантное управление, обеспечивающее полную остановку в инерциальном пространстве защищаемого объекта 1. Это утверждение справедливо в определенном диапазоне низких частот, начиная от нуля. Вибрация более высокой частоты снижается за счет свойств пассивной виброизоляции. Следует заметить, что абсолютный нуль ускорений на объекте 1 не может быть достигнут также и за счет неточностей в системе измерения и управления, за счет нелинейностей характеристик механических элементов системы виброизоляции, принимаемых в модели, используемой в наблюдателе, как линейной.
Второй режим (II) - режим позиционирования.
Если относительное перемещение x3, измеряемое датчиком 12, выходит за допустимый уровень, то инвариантный режим I с наблюдателем отключается и включается режим II. Тогда в системе виброизоляции работает закон управления:
u3(i)=ky2(i) при y2(i) ≥ δдоп ,
где
u3(i) - управляющий сигнал;
y2(i) - сигнал с датчика относительного перемещения;
δдоп - допустимый уровень перемещений.
Величина коэффициента k выбирается достаточно малой для обеспечения устойчивости системы. При этом следует выбирать гистерезисный алгоритм включения-выключения режимов I и II по следующей схеме (см. фиг.5). Если величина измеряемого относительного перемещения y2(i) во время отключения режима I выходит из трубки Δ1 < y2(i) < -Δ1 , то режим I отключается и включается режим II. Когда относительное перемещение оказывается внутри трубки Δ2 ≥ y2(i) ≥ -Δ2, то режим II отключается и включается режим I. Здесь Δ1 - допустимый уровень относительного перемещения при инвариантном управлении, при превышении которого и отключении инвариантного управления гарантированно (со 100% или с заданной вероятностью) не произойдет выход на упор и потеря виброизоляционных свойств; Δ2 - уровень относительного перемещения, ниже которого можно считать, что система виброизоляции при отключенном инвариантном управлении гарантированно ушла от крайних положений и снова можно включать инвариантное управление.
Предложенный способ виброизоляции можно применять в активных электромеханических, гидромеханических и гидропневматических системах виброизоляции, включая подвески транспортных средств, что существенно повысит их комфортабельность.
Изобретение относится к машиностроению, а именно к средствам активной виброизоляции различных объектов. Задачей изобретения является повышение эффективности виброизоляции на низких частотах путем введения инвариантного управления, обеспечивающего полную остановку в инерциальном пространстве защищаемого объекта. 5 ил.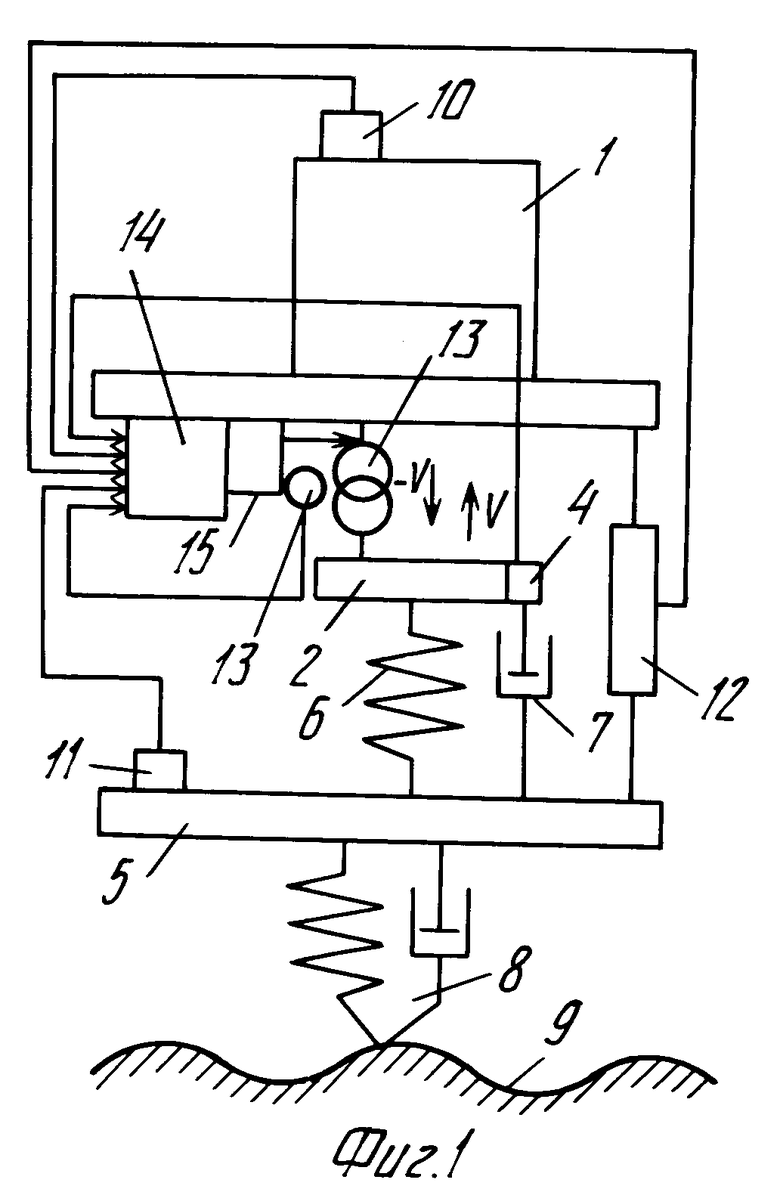
Способ виброизоляции, заключающийся в том, что на объекте и основании устанавливают акселерометры, а между ними размещают датчик относительных перемещений и активный исполнительный орган с устройством управления, обеспечивающим минимум перемещения объекта, отличающийся тем, что в устройство управления дополнительно вводят цифровой регулятор, между объектом и основанием устанавливают дополнительную упругодемпфированную площадку с расположенным на ней динамометром, исполнительный орган размещают между объектом и этой площадкой, устанавливают на нем датчик скорости, причем сигналы с акселерометров, динамометра, датчиков скорости и относительного перемещения направляют в цифровой регулятор, выход которого связан с входом исполнительного органа, причем цифровой регулятор работает в двух режимах: первый режим (I) - инвариантное управление, обеспечивающее полную остановку в инерциальном пространстве защищаемого объекта; второй режим (II) - режим позиционирования, причем, если относительное перемещение выходит за допустимый уровень, то инвариантный режим I отключается и включается режим II, при этом в системе виброизоляции создают закон управления
U3(i) = КY2(i) при Y2 (i) ≥ д о п,
причем, если величина измеряемого относительного перемещения Y2(i) во время отключения режима I находится в пределах
Δ1 < y2(i) < -Δ1
то режим I отключается и включается режим II, а если относительное перемещение оказывается в пределах
Δ2 ≥ y2(i) ≥ -Δ2
то режим II отключается и включается режим I,
где U3(i) - управляющий сигнал;
Y2(i) - сигнал с датчика относительного перемещения;
δдоп д о п - допустимый уровень перемещений;
К - коэффициент, который выбирается из условия обеспечения устойчивости системы;
Δ1 - допустимый уровень относительного перемещения при инвариантном управлении, при превышении которого и отключении инвариантного управления гарантированно не произойдет выход на упор и не будет потери виброизоляционных свойств;
Δ2 - уровень относительного перемещения, ниже которого можно считать, что система виброизоляции при отключенном инвариантном управлении гарантированно ушла от крайних положений и снова готова к включению инвариантного управления.
| SU, авторское свидетельство, 1087717, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
