Изобретение относится к области механики, в частности является манипулятором с приводом от электродвигателей. Аналогом предлагаемого манипулятора послужил манипулятор робота "Спайн" ([1] с.22, с.27), в нем используется секционный принцип построения, где верхняя м нижняя секции двигаются независимо друг от друга. Тело манипулятора состоит из множества чечевицеобразных дисков из стали, которые соединены между собой двумя парами тросов, обеспечивающих натяжение. Тросы соединены с поршнями гидравлических цилиндров, которые создавая натяжение, вызывают перемещение манипулятора.
Цель изобретения - достижение значительной гибкости секций, копирование криволинейного канала телом манипулятора, снижение энергопотребления.
Изобретение поясняется на фиг.1-3.
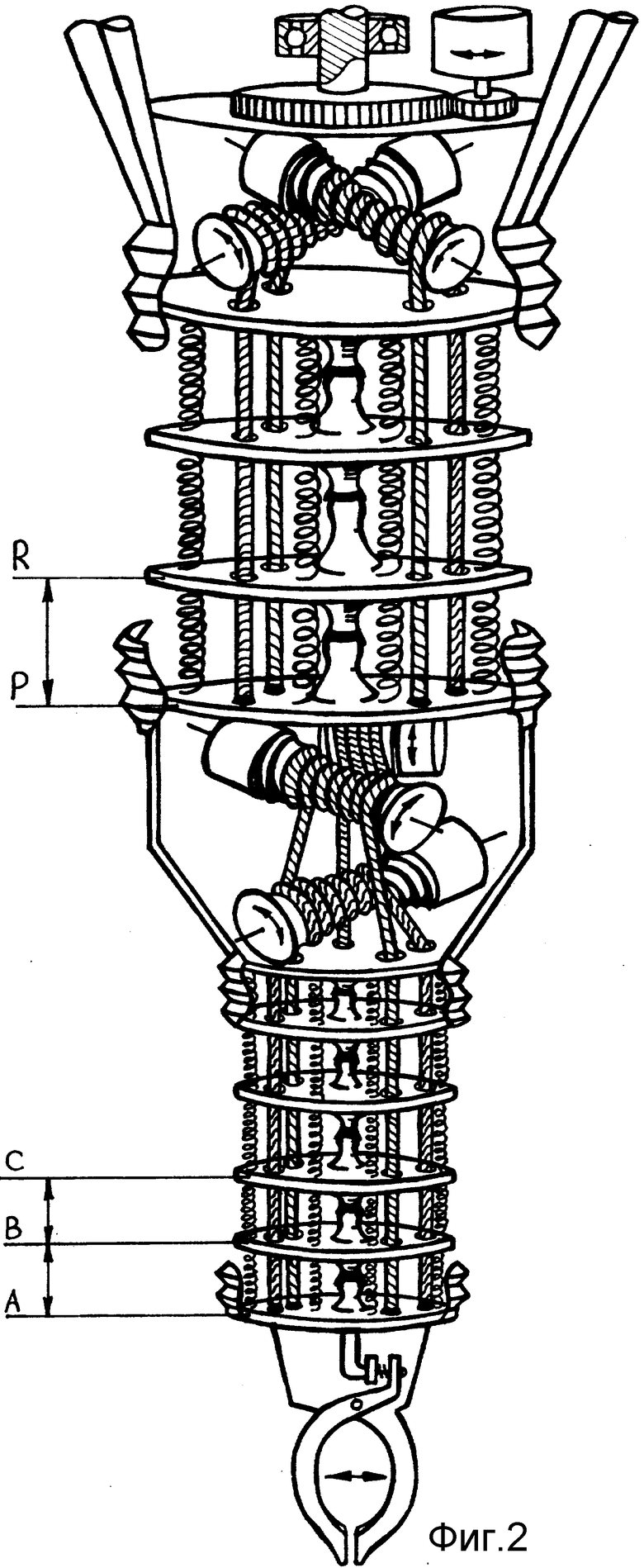
На фиг. 1 представлена часть манипулятора содержащая набор дисков A, B, C. .., связанных шаровыми опорами 1 при наличии в межкостковых пространствах подобранных по усилию сжатия и находящихся в напряженном состоянии пружины 2. Изменение позиционирования манипулятора в одной плоскости осуществляет электродвигатель 3, жестко связанный с намоточным барабаном 4. В другой плоскости работает электродвигатель 5 с намоточным барабаном 6. Тросы, идущие от барабанов, пропущены без фиксации через отверстия дисков B, C, ... с закреплением на диске A, имеющим схват 7. Трос управления схватом идет по центру шаровых опор от барабана 8, соединенного с электродвигателем 9, имеющим электромагнитный тормоз 10. Электродвигатели 3 и 5 связаны через мультипликаторы (не показаны) с многооборотными потенциометрами 11 и 12, сопротивление которых - обратная связь положения схвата в пространстве. Электродвигатель 13 установленный вне конструкции манипулятора поворачивает его вокруг продольной оси через шестеренчатую пару. В очерченных окружностях (фиг. 1) установлены одинаковые по конструкции компенсаторы 14, 14', 14A, 14A'. Компенсаторы изготовлены в виде двух роликов 15, 15', закрепленных на рейках 16, 16', способных отклоняться на оси крепления в обе стороны за счет действия пружины 17, 17' и натяжения тросов. Рейки крепятся на стройках 18, 18'. Положения реек на стройках фиксируются электромагнитными защелками (на фиг.3 не показаны).
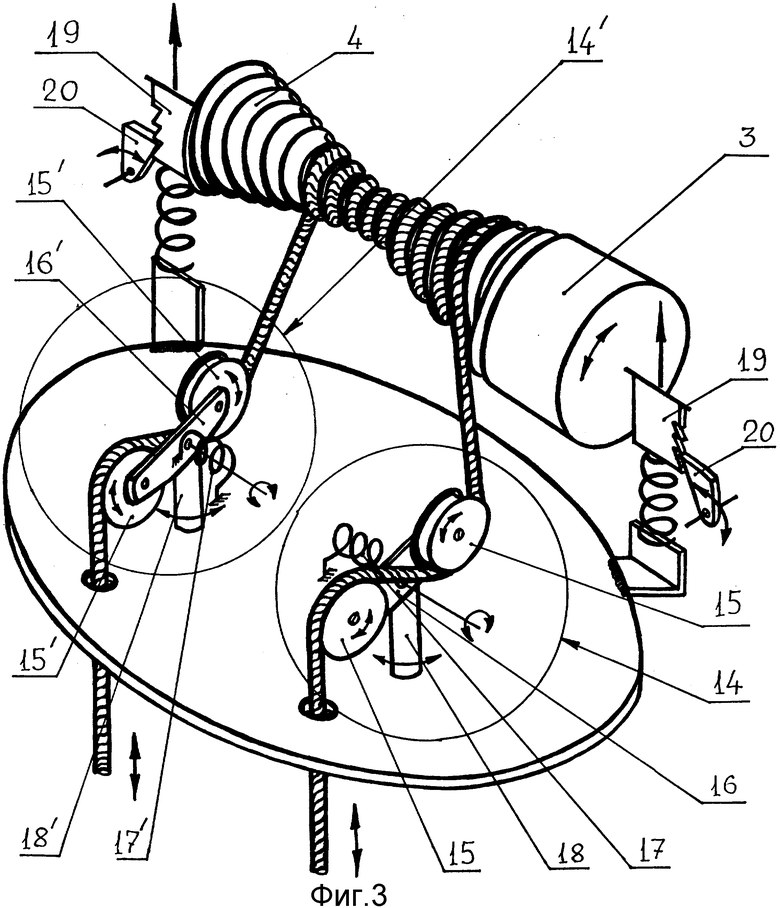
На фиг. 2 изображен манипулятор состоящий из двух секций, в которых все сцепки, намоточный барабан, электродвигатель, многооборотный потенциометр конструктивно аналогичны п.3, 4, 11.
На фиг. 3 показаны компенсаторы 14 и компенсирующиеся опоры 19 с защелками 20. Намоточные барабаны 4 и 6 изготовлены в виде двух конусов, соединенных вершинами друг к другу с проточенными по поверхностям определенной кривизны спиралевидными канавками, закручивающимися в одном направлении и служащими для укладки тросов.
Конструкция барабанов позволяет за один оборот при незначительном рыскании по поверхности получить наибольший коэффициент пропорциональных отношений удлинения, укорочения частей тросов управления. Барабан 8 выполнен конусным с проточенной спиралевидной канавкой, закручивающейся в одном направлении по длине барабана.
Работает манипулятор следующим образом.
В вертикальном положении (фиг. 1) трос, работающий в одной плоскости, занимает одинаковое по диаметру положение в канавках конусного барабана 4. При вращении электродвигателя 3 по часовой стрелке на правом конусе барабана 4 происходит намотка части троса на канавку с большим диаметром, а на левом конусе барабана 4 трос укладывается в канавку меньшего диаметра, вследствие чего происходит пропорциональное укорочение, удлинение частей троса, что в свою очередь приводит к отклонению диска A на определенный угол от горизонтали при перераспределении энергии напряженных пружин 2, передающих свои усилия сжатия, растяжения плоскостями дисков, тем самым способствуя изгибу тела манипулятора в сторону наименьшей длины части троса. Отклонения в другой плоскости происходят аналогично описанному выше. Совмещая отклонения во взаимно перпендикулярных плокостях с вращением манипулятора вокруг продольной оси электродвигателем 13, добиваемся сложных траекторий движения схвата в сферической системе координат. Секции (фиг.2) работают по тому же принципу, но для получения большей гибкости тела манипулятор расстояния между дисками A, B, C..., первой секции и расстояния P, R..., второй секции различны, а также различны диаметры, на которых лежат точки крепления концов тросов на дисках A и P, что дает возможность при меньшем диаметре расположения точек крепления и незначительных перемещениях тросов управления плоскостей получать большие отклонения дисков A и P и как следствие значительные изгибы манипулятора.
Электродвигатель 9, вращая барабан 8, наматывает трос, приводящий к смыканию схвата с фиксацией вала электродвигателя 8 фрикционом электромагнитного тормоза 10, приводимым в действие усилием сжатой пружины, что дает экономию электроэнергии на время удержания сомкнутого состояния схватом. Растормаживание вала происходит в момент подачи напряжения на обмотку электромагнитного тормоза. Барабан 8 выполнен в виде конуса, расположенного на валу электродвигателя 9. Способность тела манипулятора, проникая в канал, адаптироваться к его кривизне описывается следующим образом.
Рейки 16, 16' компенсаторов 14, 14' при срабатывании электромагнитных защелок приобретают относительную степень свободы на своих осях и при вводе с определенным усилием в канал, имеющий кривизну, ведут себя двояко, т.е. диск A при проходе криволинейного участка изгибается, копируя кривизну канала, при этом часть диска, имеющего закрепленный трос управления, проходя участок канала с меньшим радиусом кривизны, отклоняется в сторону, приводящую к ослаблению натяжения троса, в результате образуется провис троса, который убирается за счет поворота рейки 16 компенсатора 14 по часовой стрелке (фиг. 3) усилием закручивающей пружины 17, а при прохождении другой частью диска изогнутого участка с большим радиусом кривизны и также имеющего закрепленный конец троса, располагающийся в той же плоскости, что и описанный выше, имеем отклонение этой части диска в сторону натяжения троса, воздействующего через ролики 15' на рейку 16' компенсатора 14' с усилением, большим усилия закручивающей пружины 17', что в свою очередь приводит к ориентации рейки 16' против часовой стрелки и как следствие удлинению этой части троса. Возможность компенсировать относительные изменения линейных размеров частей тросов при неподвижных намоточных барабанах позволяет манипулятору при вводе с усилием в изогнутый канала, охватывающий тело манипулятора по периметру, копировать его дисками и при выходе схвата в зону за каналом на необходимую длину, зафиксировав электромагнитными защелками рейки 16, 16' компенсаторов 14, 14', 14A, 14A', дальнейшее позиционирование в пространстве зоны осуществлять намоткой тросов на конусные барабаны 4 и 6.
Компенсирующиеся опоры 19, на которых закреплены намоточные барабаны с электродвигателями, мультиплекаторами и многооборотными потенциометрами, предназначены для устранения эксплуатационных удлиннений тросов за счет выталкивания пружины опор крепления до момента натяжения тросов с фиксацией положения опор защелками 20, тем самым устраняются проскальзывания тросов по спиралевидным канавкам конусных барабанов, сведя до минимума погрешности позиционирования схвата в пространстве.
Манипулятор выполнен в виде двух вариантов. Первый вариант содержит секции, имеющие баконические намоточные барабаны с электродвигателями и далее частные случаи исполнения манипулятора с элементами, описанными выше. Второй вариант содержит секции, имеющие цилиндрические намоточные барабаны с электродвигателями, компенсаторами тросов и далее частные случаи исполнения манипулятора с элементами, описанными выше.
Количество секций в манипуляторе может быть больше двух.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ ДИСБАЛАНСА ВРАЩАЮЩЕЙСЯ СИСТЕМЫ | 2002 |
|
RU2237118C2 |
| МАНИПУЛЯТОР | 1995 |
|
RU2090353C1 |
| Фотоэлектрический дистанционный уровнемер | 1990 |
|
SU1789873A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1987 |
|
SU1733232A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Манипулятор | 1985 |
|
SU1256955A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНОГО НАГРЕВАТЕЛЬНОГО ЭЛЕМЕНТА К МНОГОСЛОЙНОМУОСТЕКЛЕНИЮ | 1971 |
|
SU421650A1 |
| СПОСОБ СОРТИРОВКИ КУСКОВОГО МИНЕРАЛЬНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2103075C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
Изобретение относится к робототехнике. Манипулятор приводится в действие электродвигателями и способен работать в сферической системе координат при значительной гибкости позиционирования, а также он имеет особенность при вводе в изогнутые технологические каналы, охватывающие его по периметру, адаптироваться к кривизне канала с возможностью осуществлять дальнейшее позиционирование схвата в технологической зоне за каналом. Манипулятор выполнен в виде секций, представляющих собой наборы дисков, соединенных шаровыми опорами, с междисковыми пространствами, заполненными напряженными пружинами при наличии несущих дисков, один из которых выполнен за одно целое со схватом и имеет точки закрепления тросов управления, идущих от конусных барабанов, крепящихся во взаимно перпендикулярных плоскостях на другом несущем диске и вращаемых электродвигателями, жестко соединенными с многооборотными потенциометрами, выполняющими роль датчиков обратной связи, здесь же на этом диске располагается барабан с электродвигателем и электромагнитным тормозом. Этот узел предназначен для смыкания схвата за счет намотки на барабан троса, пропущенного через центры шаровых опор. На оставшемся несущем диске имеются аналогичные конусные барабаны для отклонения по плоскостям, а также он имеет шестерню, посредством которой передается вращение манипулятору относительно продольной оси от электродвигателя, закрепленного вне конструкции. Манипулятор имеет компенсирующиеся опоры, устраняющие эксплуатационные вытягивания тросов, а также имеет компенсаторы, позволяющие убирать изменения длин тросов при вводе в изогнутый канал. Позиционирование в плоскостях происходит от изменения длин частей тросов, наматываемых на различные диаметры канавок конусных барабанов и приводящих к отклонению дисков, крепящих концы этих тросов, что в свою очередь приводит к перераспределению усилий напряженных пружин плоскостям дисков, изгибающих тело манипулятора. 2 с. и 10 з.п.ф-лы, 3 ил.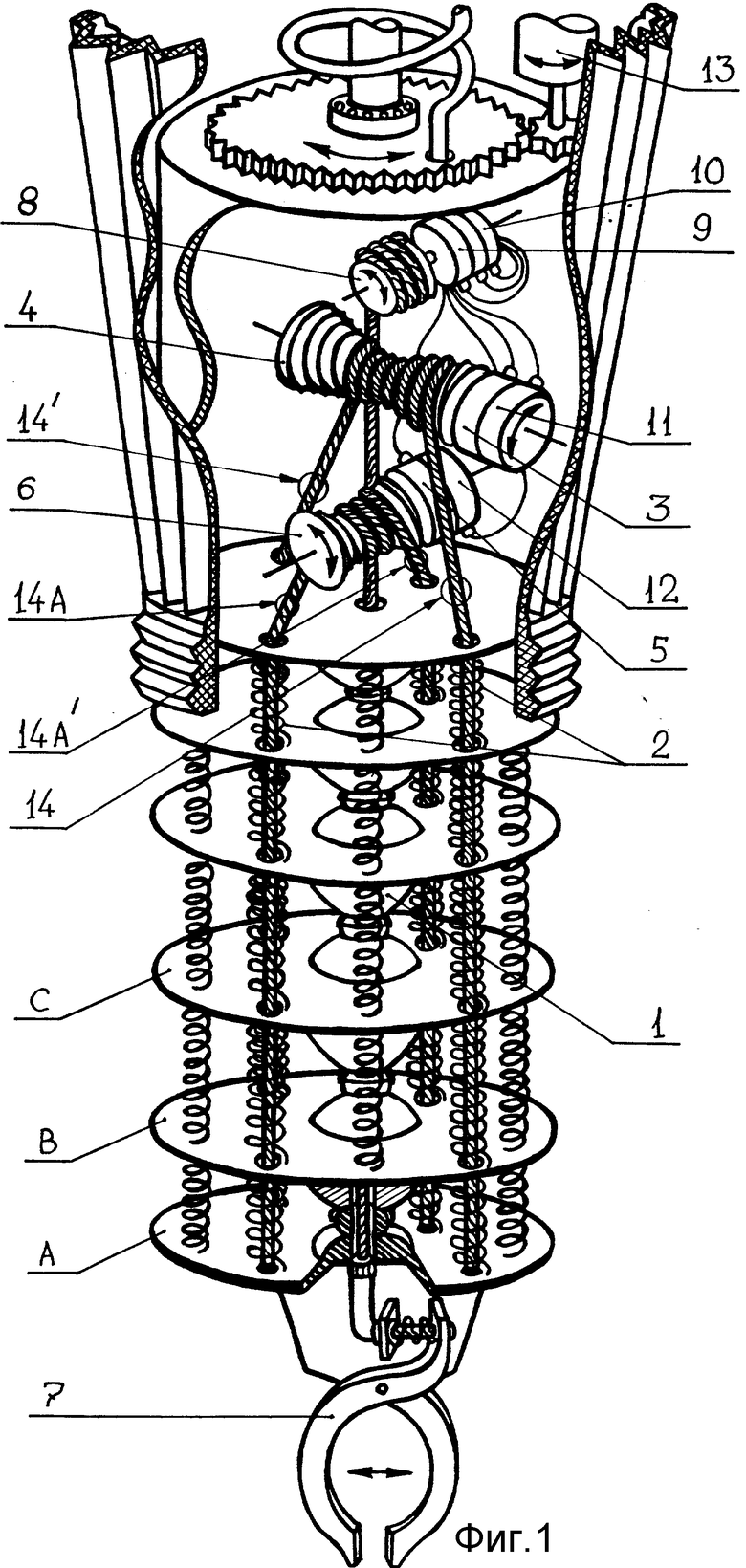
| Марш П., Александер И., Барнет П | |||
| и др | |||
| Не счесть у робота профессий | |||
| Пер | |||
| с англ | |||
| под ред.В.С.Гурфинкеля | |||
| - М.: Мир, 1987, с.21, 22 и 27. |
