01
ю «vi
00
Изобретение относится к машиностроению, а именно к схватам манипуляторов для точного захвата изделий и перемещения их в пространстве, и может быть использовано для механизации и автоматизации различных технологических процессов.
Известен схват манипулятора, содержащий силовой цилиндр, шток которого размещен внутри базовой траверсы и корпуса, зажимные губки, механизм их раскрытия, а также рычаги, уарнирно связанные через кронштейны с корпусом flj.
Недостатком известного схвата является недостаточная надежность фиксации губок в сведенном и разведенном положении.
Цель изобретения - повышение надежности фиксации , губок в сведенном и разведенном положении.
Поставленная цель достигается тем, что схват манипулятора, имеющий силовой цилиндр, шток которого размещен внутри базовой траверсы и корпуса, зажимные губки, механизм их раскрытия, имеющий зарделки, а также рьмаги, шарнирно связанные через кронштейны, с корпусом, снабжен дополнительной траверсой,жестко связанной со штоком и подпружиненной относительно корпуса,барабанами, расположеннььми с возможностью взаимодействия с защелками механизма раскрытия губок, и храповшди механизмами с двумя собачками,храповое колесо каждого из которых смонтировано на оси барабана, а.собачки одна на базовой траверсе, а другая на дополнительной траверсе, причем оси барабанов перпендикулярны оси штока, а защелки механизма раскрытия губок установлены на кронштейнах попарно и в каждой паре кинематически связаны между собой.
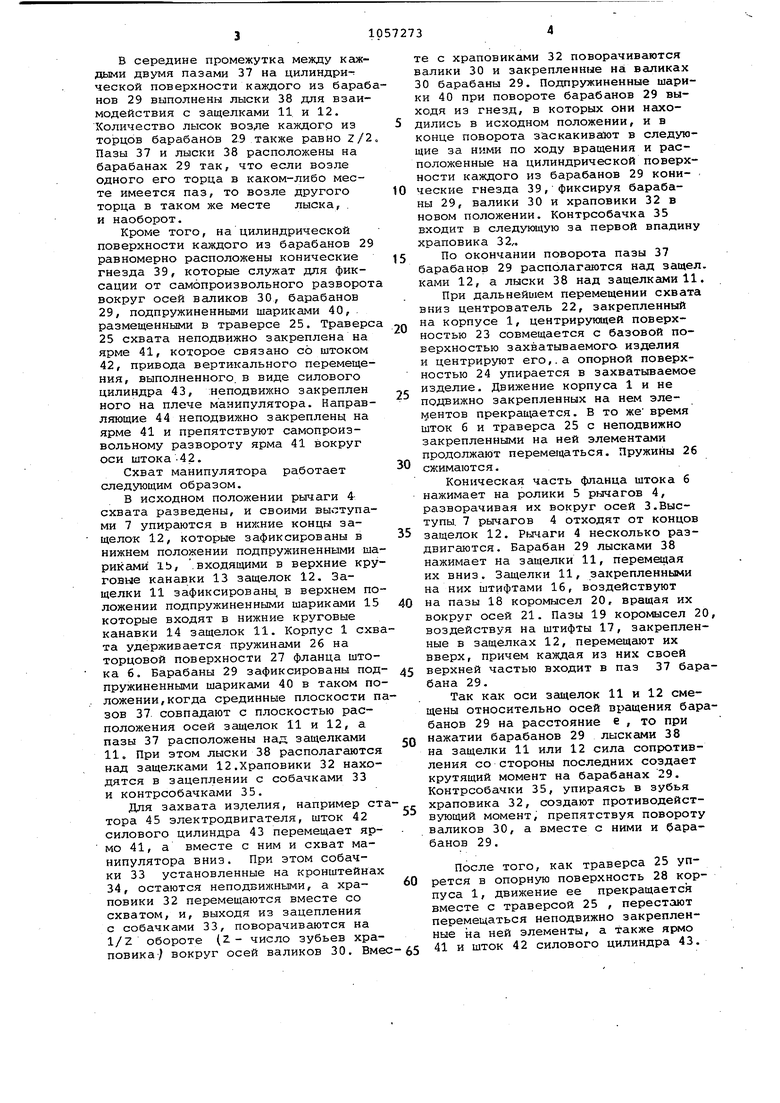
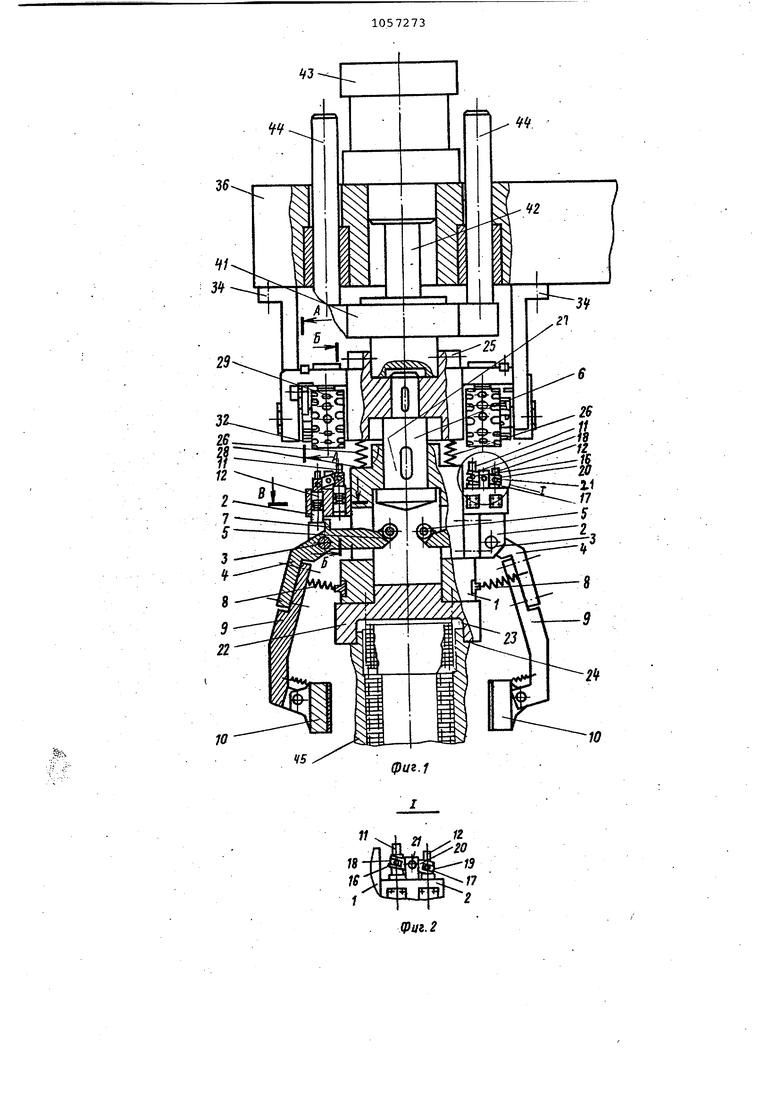
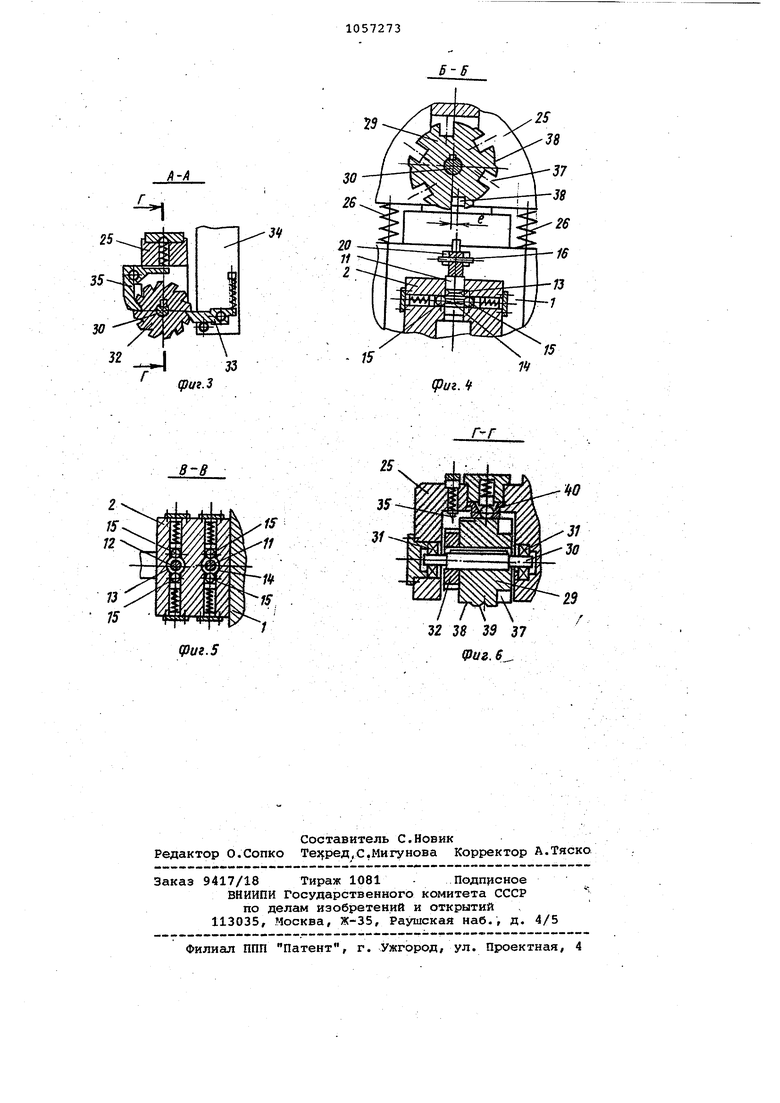
На фиг. 1 показан схват манипулятора, общий вид; на фиг. 2 - место 1 на фиг. 1; на фиг. -.3 - разрез Л-Л на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на $иг. б -разрез Г-Г на фиг. 3.
Схват манипулятора содержит корпус 1, на котором неподвижно закреплены кронштейны 2, в щеках которых установлены оси 3 с шарни$эно закрепленныг ш на них рычагаьчи 4. На рычагах 4 закреплены ролики 5 для взаимодействия с конической настью фланца штока 6, а также выступы 7. Рычаги 4 подпружинены относительно , корпуса 1 схвата пружинами 8. На рычагдх 4 неподвижно закреплены сменные пальцы 9 сшарнирно закрепленным на них самоустанавливающимися губками 10, подпружиненными относительно пальцев 9. В корпусе каждого из- кронштейнов 2 установлены с возможность
возвратно-поступательного перемещения вдоль собственных осей защелки 11 и 12 механизма раскрытия губок, калсдая из которых имеет верхнюю 13 и нижнюю 14 круговые канавки для фиксации защелок 11 и 12 подпружиненными шариками 15, размещенными в кронштейне 2 так, что их центры расположены в одной плоскости.
В .верхней части каждой из защелок 11 и 12 перпендикулярно их осям закреплены штифты 16 и 17, концы которых входят соответственно в пазы 18 и 19 коромысла 20,. имеющего возможность вращения вокруг оси 21, закрепленной на кронштейне 2„
Сменный центрователь 22 для центрования захватываемого изделия центрирующей поверхностью 23, повторяющей конфигурацию базовой поверхности изделия и упора в него опорной поверхностью 24, неподвижно закреплен на корпусе 1,
Корпус 1 схвата с неподвижно закрепленными на нем элементами установлен на штоке 6 с возможностью возвратно-поступательного перемещения, вдоль его оси. Шток б неподвижно закреплен на траверсе 25, которая при отсутствии силового воздействия на корпус 1, удерживает последний посредством отжимных пружин 26, на торцовой поверхности 27 фланца штока 6. Корпус 1 схвата имеет опорную поверхность 28 для взаимодействия с траверсой 25 ( дополнительной ,
Над каждым из кронштейнов 2 с защелками 11 и 12 размещен цилиндрический барабан 29, закрепленный на валике 30, имеющем возможность вращения в подшипниках 31 траверсы 25„ Оси валиков 30 перпендикулярны оси штока б. Вместе с барабанами 29 на валиках 30 закреплены храповики 32, кажл.1й из которых имеет четное число зубьев Z . Храповики 32 входят в зацепление с собачками 33, установленньвди на неподвижных кронштейнах 34, и контрсобачками 35, установленными на траверсе 25. Кронштейны 34 закреплены на траверсе 36 (базовой ),
Оси каяодого из валиков 30 и каждой из защелок 11 и 12 геометрическ представляют собой скрещивающиеся прямые, расстояние между которыгли равно некоторой величине (фиг. 4/
Возле двух торцов каждого из барабанов 29 выполнены пазы 37, равномерно расположенные на цилиндрическИхХ поверхностях барабана 29 так, что срединные плоскости пазов 37 отстоят от осей валиков 30 на растояние е . Количество пазов кахсдого барабана 29 равно , где 2 число зубьев храповика 32,
В середине промежутка между каждыми двумя пазами 37 на цилиндри-т ческой поверхности каждого из барабанов 29 выполнены лыски 38 для взаимодействия с защелками 11 и 12. Количество лысок возле каждого из торцов барабанов 29 также равно 2/2 Пазы 37 и лыски 38 расположены на барабанах 29 так, что если возле одного его торца в каком-либо месте имеется паз, то возле другого торца в таком же месте лыска, и наоборот.
Кроме того, на цилиндрической поверхности каждого из барабанов 29 равномерно расположены конические гнезда 39, которые служат для фиксации от самопроизвольного разворота вокруг осей валиков 30, барабанов 29, подпружиненными шариками 40, . размещенными в траверсе 25. Траверса 25 схвата неподвижно закреплена на ярме 41, которое связано со штоком 42, привода вертикального перемещения, выполненного, в виде силового цилиндра 43, :неподвижно закреплен ного на плече манипулятора. Направляющие 44 неподвижно закреплены на ярме 41 и препятствуют самопроизвольному развороту ярма 41 вокруг оси штока-42.
Схват манипулятора работает следующим образом.
В исходном положении рычаги 4 схвата разведены, и своими выступами 7 упираиотся в нижние концы защелок 12, которые зафиксированы в нижнем положении подпружиненными шариками 1Ь, .входящими в верхние круговые канавки 13 защелок 12. Защелки 11 зафиксированы в верхнем положении подпружиненными шариками 15 которые входят в нижние круговые канавки 14 защелок 11. Корпус 1 схвата удерживается пружинами 26 на торцовой поверхности 27 фланца штока 6. Барабаны 29 зафиксированы подпружиненными шариками 40 в таком положении, когда срединные плоскости пазов 37. совпадают с плоскостью расположения осей защелок 11 и 12, а пазы 37 расположены над защелками 11, При этом лыски 38 располагаются над защелками 12.Храповики 32 находятся в зацеплении с собачками 33 и контрсобачками 35.
Для захвата изделия, например сттора 45 электродвигателя, шток 42 силового цилиндра 43 перемещает ярмо 41, а вместе с ним и схват манипулятора вниз. При этом собачки 33 установленные на кронштейнах 34, остаются неподвижными, а храповики 32 перемещаются вместе со схватом, и, выходя из зацепления с собачками 33, поворачиваются на 1/Z обороте (2.- число зубьев храповика) вокруг осей валиков 30. Вместе с храповиками 32 поворачиваются валики 30 и закрепленные на валиках 30 барабаны 29. Подпружиненные шарики 40 при повороте барабанов 29 выходя из гнезд, в которых они находились в исходном положении, и в
конце поворота заскакивают в следующие за ними по ходу вращения и расположенные на цилиндрической поверхности каждого из барабанов 29 кони- .
ческие гнезда 39, фиксируя барабаны 29, валики 30 и храповики 32 в новом положении. Контрсобачка 35 входит в следующую за первой впадину храповика 32,.
По окончании поворота пазы 37
барабанов 29 располагаются над защел. ками 12, а лыски 38 над защелками 11. При дальнейшем перемещении схвата вниз центрователь 22, закрепленный на корпусе 1, центрирующей поверхностью 23 совмещается с базовой поверхностью захватываемого изделия и центрируют его,.а опорной поверхностью 24 упирается в захватываемое
изделие. Движение корпуса 1 и не
подвижно закрепленных на нем элементов прекращается. В то же время шток б и траверса 25 с неподвижно закрепленными на ней элементами продолжают перемещаться. Пружины 26
сжимаются.
Коническая часть фланца штока 6 нажимает на ролики 5 рычагов 4, разворачивая их вокруг осей 3.Выступы. 7 рычагов 4 отходят от концов
защелок 12. Рычаги 4 несколько раздвигаются. Барабан 29 лысками 38 нажимает на защелки 11, перемещая их вниз. Защелки 11, закрепленными на них штифтами 16, воздействуют
на пазы 18 коромысел 20, вращая их вокруг осей 21. Пазы 19 коромысел 20, воздействуя на штифты 17, закрепленные в защёлках 12, перемещгиот их вверх, причем каждая из них своей
верхней частью входит в паз 37 барабана 29.
Так как оси защелок 11 и 12 смещены относительно осей вращения барабанов 29 на расстояние е , то при
нажатии барабанов 29 лысками 38 на защелки 11 или 12 сила сопротивления со стороны последних создает крутящий момент на барабанах 29. Контрсобачки 35, упираясь в зубья
храповика 32, создают противодействующий момент, препятствуя повороту валиков 30, а вместе с ними и барабанов 29.
После того, как траверса 25 упрется в опорную поверхность 28 корпуса 1, движение ее прекращается вместе с траверсой 25 , перестают перемещаться неподвижно закрепленные на ней элементы, а также ярмо 41 и шток 42 силового цилиндра 43.
Подпружиненные шарики 15 входят в нижние круговые канавки 14 защелок 12 и зафиксируют их в верхнем положении. Защелки 11 фиксируются в нижнем положении подпружиненными шариками 15, входящими в верхние круговые канавки защелок 11.
Для зажима изделия губками 10 и подъема его шток 42 рилового цилиндра перемещается вверх. Вместе со штоками вверх перемещается ярмо 41, которое перемещает за собой траверсу 25 с неподвижно закрепленными на ней элементами. Корпус 1 схвата под действием силы веса и усилия отжимных пружин 26 прижимается к захватываемому изделию и остается неподвижным. Шток б, перемещаясь вместе с траверсой 25 вверх,-освобождает ролики 5 от воздействия, и рычаги 4 под действием пружин 8 вращаются вокруг осей 3.
Защелки 12, перемещенные вверх и зафиксированные в этом положении, не препятствуют прохождению выступов 7 рычагов 4, которые, смыкаясь, прижимают к захватываемому изделию самоустанавливающиеся губки 10, шарнирно закрепленные на пальцах 9 и подпружиненные относительно них.
В момент прижатия к торцовой поверхности 27 фланца штока 6 корпус 1 и вместе с ним захваченное изделие начинает перемещаться вверх до тех пор, пока шток 42 силового цилиндра 43 не, возвратится в исходное положение. Храповик 32 вновь входит в зацепление с собачкой 33, установленной на кронштейне -34.
Схват перемещает изделие на следующую позицию.
Для установки захваченного изделия в следующей позиции и освобсвдения его шток 42 перемещает вниз схват манипулятора с изделием. Храповики
32,выходя из зацепления с собачками
33,поворачиваются на 1/Z оборота Так же поворачиваются и барабаны 29, лыски 38 которых при этом располагаются Нс1д удлиненными защелками
12, зафиксированными в верхнем положении, а пазы 37 - над защелками 11, зафиксированньпми в нижнем положении.
В момент, когда захваченное изделие упрется в предназначенное для него место, движение Koptfyca 1 прекращается. Траверса 25 с неподвижно закрепленными на ней элементами продолжает перемещаться. Коническая часть фланца штока б, нажи1- ая на ролики 5, вращает рычаги 4 вокруг осей 3. Пальцы 9 с губками 10 отход от изделия, освобождая его.Барабаны 29 нажимают лысками 38 на защелки 12, которые, перемещаясь вниз посредством штифтов 17, взаимодействующих с пазами 19 коромысел 20, поворачивают последние вокруг осей 21. Коромысла 20 при своем вращении пазами 18 воздействуют на штифты 16 защелок 11 и перемещают защелки 11 вверх. В момент упора в поверхность 28 корпуса 1 траверса 25 с неподвижно закрепленными на ней элементами останавливается.Защелка. 11 фиксируется в верхнем положении, а защелка 12 - в нижнем.
Далее шток 42 силового цилиндра 43 Начинает перемещаться вверх, перемещая за собой ярмо 41, с .неподвижно закрепленной на ней траверсой 25. Корпус 1 под действием силы веса и усилия пружин 26 остается неподвижным.Шток 6, перемещаясь вмете с траверсой 25 вверх, освобождает ролики 5 от воздействия. Рычаги 4 под действием пружин 8 вращаются вокруг осей 3 до тех пор, пока выступы 7 не упрутся в нижние части защелок 12, которые фиксируют рычаги в разомкнутом положении. Коническая часть фланца штока б отходит от роликов 5. При дгшьнейшем перемещении штока б корпус 1 упирается в торцовую поверхность 27 фланца штока б и начинает перемедаться вверх, отделяясь от изделия.Скват приводится в исходное положение.
Использование охвата предлагаемой конструкций позволяет повысить надежность работы и расширить функциональные возмогйности манипулятора путем обеспечения точного захватывания изделий за необработанные поверхности и их установки в требуемом месте.
Предлагаемый схват может быть использован для механизации и автоматизации различных технологических процессов и повышает производительность труда.
-V3
t
45
10
фиг.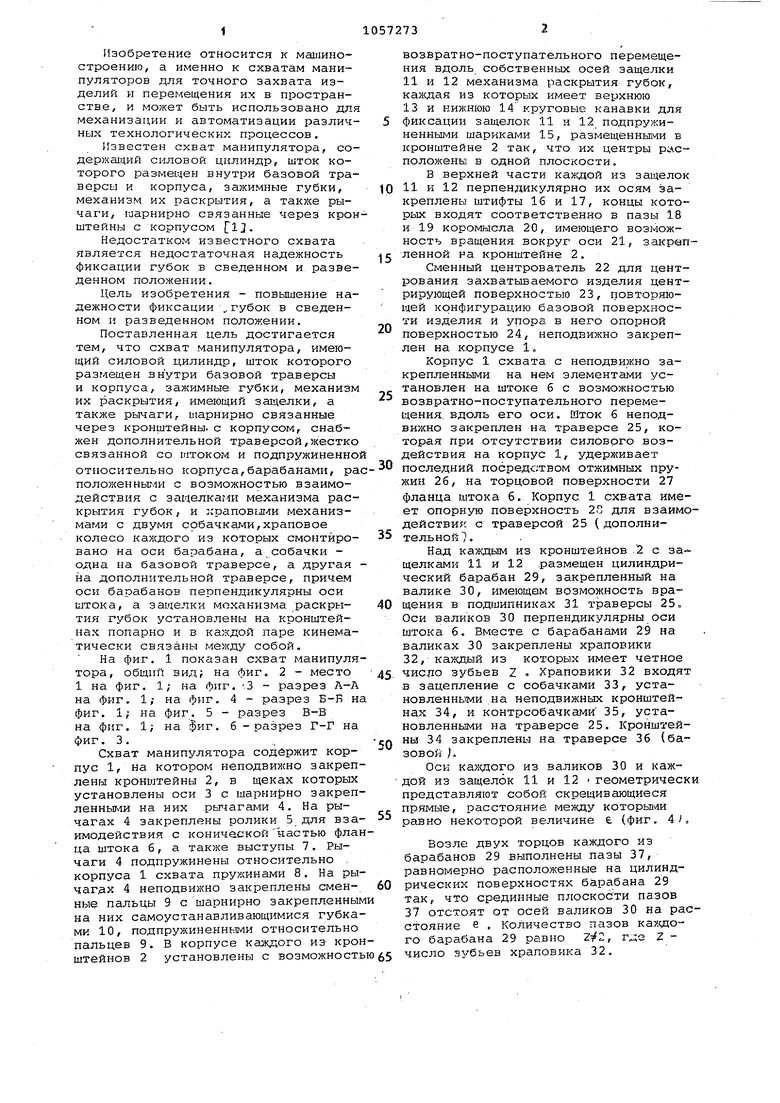
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Устройство для съема с отделочных форм и укладки носочных изделий | 1989 |
|
SU1726605A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| ПРУЖИННЫЙ ПРИВОД ВЫСОКОВОЛЬТНОГО КОММУТАЦИОННОГО АППАРАТА | 2007 |
|
RU2336589C1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
| Печатающий аппарат, например, к автоматической машине для измерения площади и толщины кож | 1961 |
|
SU151042A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
СХВАТ МАНИПУЛЯТОРА, содержащий силовой цилиндр, ш.ток которого размещен внутри базовой траверсы и корпуса, зажимные губки, механизм их раскрытия, имеющий защелки, а также рычаги, шарнирно связанные через кронштейны с корпусе, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительной траверсой, жестко связанной со штоком и подпружиненной относительно корпуса,ба15абанами, расположенньоли с возможностью взаимодействия с защелками механизма раскрытия губок, и храповыми механизмами с двумя собачками,храповое колесо Каждого из KOTojajx смонтировано на оси барабана, а собачки - одна на базовой траверсе, другая - на дополнительной траверсе, причем оси барабанов перпендикулярны оси штока, а защелки механизма раскрытия губок установлены на кронштейнах попарно и в каждой паре в кинематически связаны между собой. (Л
18 If
19
17
А-А
дзиг.з
2S
15
15
(Puz.f
В-В
(риг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
