ivl СО |CJ :ГО 00
ю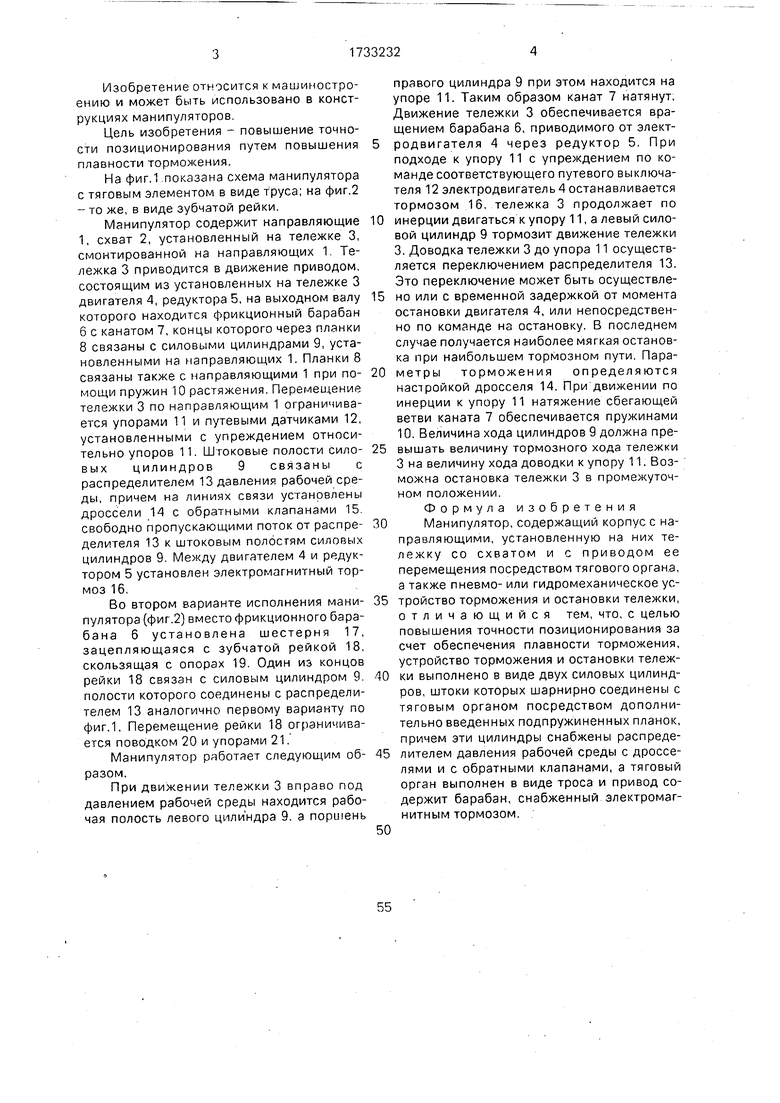
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| Привод перемещения ходовой тележки стеллажного крана-штабелера | 1984 |
|
SU1194789A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| Устройство для торможения и точной остановки путевой машины | 1983 |
|
SU1098836A1 |
| Привод | 1979 |
|
SU875136A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Тяговое устройство | 1978 |
|
SU727860A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
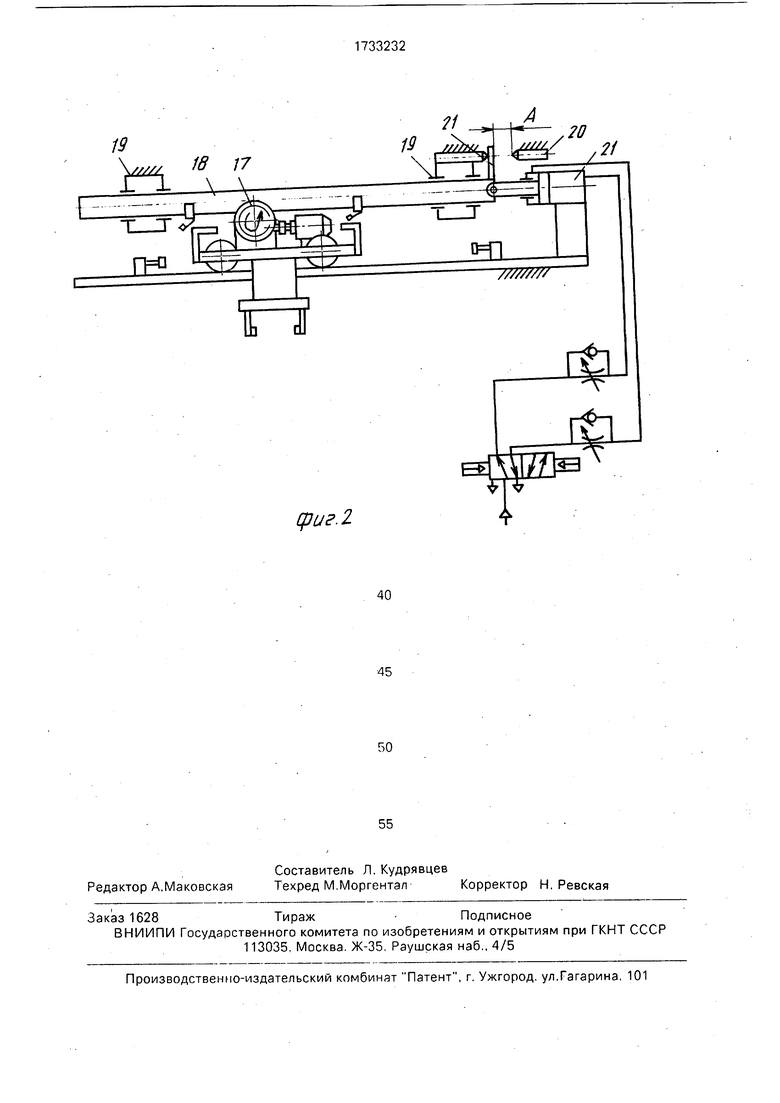
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является повышение точности позиционирования путем повышения плавности торможения. В начале работы включают электродвигатель 4. который через редуктор ю 5 и тормоз 16 сообщает вращение барабану 6. Намотанный на нем трос 7 приводит в движение тележку 3. При ее движении вправо под давлением находится рабочая полость левого цидлиндра, а поршень правого цилиндра при этом находится на упоре 11. В результате этого трос 7 натянут. При подходе к упору 11 с упреждением по команде соответствующего путевого выключателя 12 электродвигатель 4 останавливается тормозом 16. тележка 3 продолжает по инерции двигаться к упору 11. При этом левый силовой цилиндр посредством троса 7 тормозит движение тележки 3. Ее доводка до упора 11 осуществляется переключением распределителя 13. Параметры торможения определяются настройкой дросселей 14. Возможна остановка тележки 3 в промежуточном положении. 2 ил. ш. Ё
фиг.1
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов
Цель изобретения - повышение точности позиционирования путем повышения плавности торможения.
На фиг.1 показана схема манипулятора с тяговым элементом в виде труса; на фиг.2 - то же, в виде зубчатой рейки.
Манипулятор содержит направляющие 1, схват 2, установленный на тележке 3, смонтированной на направляющих 1 Тележка 3 приводится в движение приводом, состоящим из установленных на тележке 3 двигателя 4, редуктора 5, на выходном валу которого находится фрикционный барабан 6 с канатом 7, концы которого через плянки 8 связаны с силовыми цилиндрами 9, установленными на направляющих 1. Планки 8 связаны также с направляющими 1 при помощи пружин 10 растяжения. Перемещение тележки 3 по направляющим 1 ограничивается упорами 11 и путевыми датчиками 12, установленными с упреждением относительно упоров 11. Шгоковые полости силовых цилиндров 9 связаны с распределителем 13 давления рабочей среды, причем на линиях связи установлены дроссели 14 с обратными клапанами 15 свободно пропускающими поток от распределителя 13 к штоковым полостям силовых цилиндров 9. Между двигателем 4 и редуктором 5 установлен электромагнитный тормоз 16.
Во втором варианте исполнения манипулятора (фиг.2) вместо фрикционного бара- бана 6 установлена шестерня 17, зацепляющаяся с зубчатой рейкой 18, скользящая с опорах 19. Один из концов рейки 18 связан с силовым цилиндром 9 полости которого соединены с распределителем 13 аналогично первому варианту по фиг.1. Перемещение рейки 18 ограничивается поводком 20 и упорами 21.
Манипулятор работает следующим образом.
При движении тележки 3 вправо под давлением рабочей среды находится рабочая полость левого цилиндра 9, а поршень
правого цилиндра 9 при этом находится на упоре 11. Таким образом канат 7 натянут. Движение тележки 3 обеспечивается вращением барабана 6, приводимого от электродвигателя 4 через редуктор 5, При подходе к упору 11 с упреждением по команде соответствующего путевого выключателя 12 электродвигатель 4 останавливается тормозом 16. тележка 3 продолжает по
инерции двигаться к упору 11, а левый силовой цилиндр 9 тормозит движение тележки 3. Доводка тележки 3 до упора 11 осуществляется переключением распределителя 13. Это переключение может быть осуществлено или с временной задержкой от момента остановки двигателя 4, или непосредственно по команде на остановку. В последнем случае получается наиболее мягкая остановка при наибольшем тормозном пути. Параметры торможения определяются настройкой дросселя 14. При движении по инерции к упору 11 натяжение сбегающей ветви каната 7 обеспечивается пружинами 10. Величина хода цилиндров 9 должна превышать величину тормозного хода тележки 3 на величину хода доводки к упору 11. Возможна остановка тележки 3 в промежуточном положении.
Формула изобретения
Манипулятор, содержащий корпус с направляющими, установленную на них тележку со схватом и с приводом ее перемещения посредством тягового органа, а также пневмо- или гидромеханическое устройство торможения и остановки тележки, отличающийся тем, что, с целью повышения точности позиционирования за счет обеспечения плавности торможения, устройство торможения и остановки тележки выполнено в виде двух силовых цилиндров, штоки которых шарнирно соединены с тяговым органом посредством дополнительно введенных подпружиненных планок, причем эти цилиндры снабжены распределителем давления рабочей среды с дросселями и с обратными клапанами, а тяговый орган выполнен в виде троса и привод содержит барабан, снабженный электромагнитным тормозом.
19
(риг. 2
20
21
| Манипулятор | 1985 |
|
SU1242347A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
